






按键驱动原理
嵌入式竞赛平台使用接触式按键。接触式按键是依靠机械的接触来实现开关的功能,由于机械触点的弹性作用,开关在闭合时不会马上稳定接通,在断开是也不会立即彻底断开,故存在接触不稳定的情况,即抖动(按键按下和弹起的瞬间不确定电平变化),抖动会影响我们对端口电平的判断,因此在使用按键时必须进行消抖。我们通常使用软件消抖的方式。
软件消抖:当检测到按键状态变化时,延迟10ms,再次检测按键电平状态,若与上次电平状态一致,说明电平状态稳定。
完整按键过程:按键按下->延时消抖->按键弹起
编程实战练习
实验现象,B1按键按下,LED1指示灯状态翻转,B2按键按下,LED2指示灯状态翻转
步骤:
1.查看原理图,找到对应按键和指示灯引进
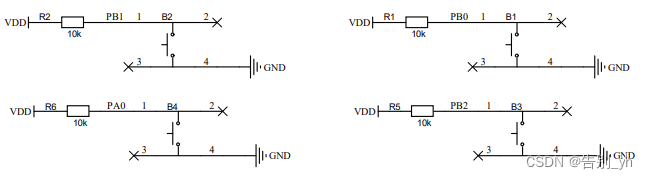
查阅嵌入式竞赛实训平台原理图,平台上的B1-4四个按键分别与开发板引进PB0,PB1,PB2,PA0相连。显然,每个按键都通过10K电阻被上拉到VDD,因此按键未按下时为高电平,按下是低电平
2.配置STM32 Cube MX
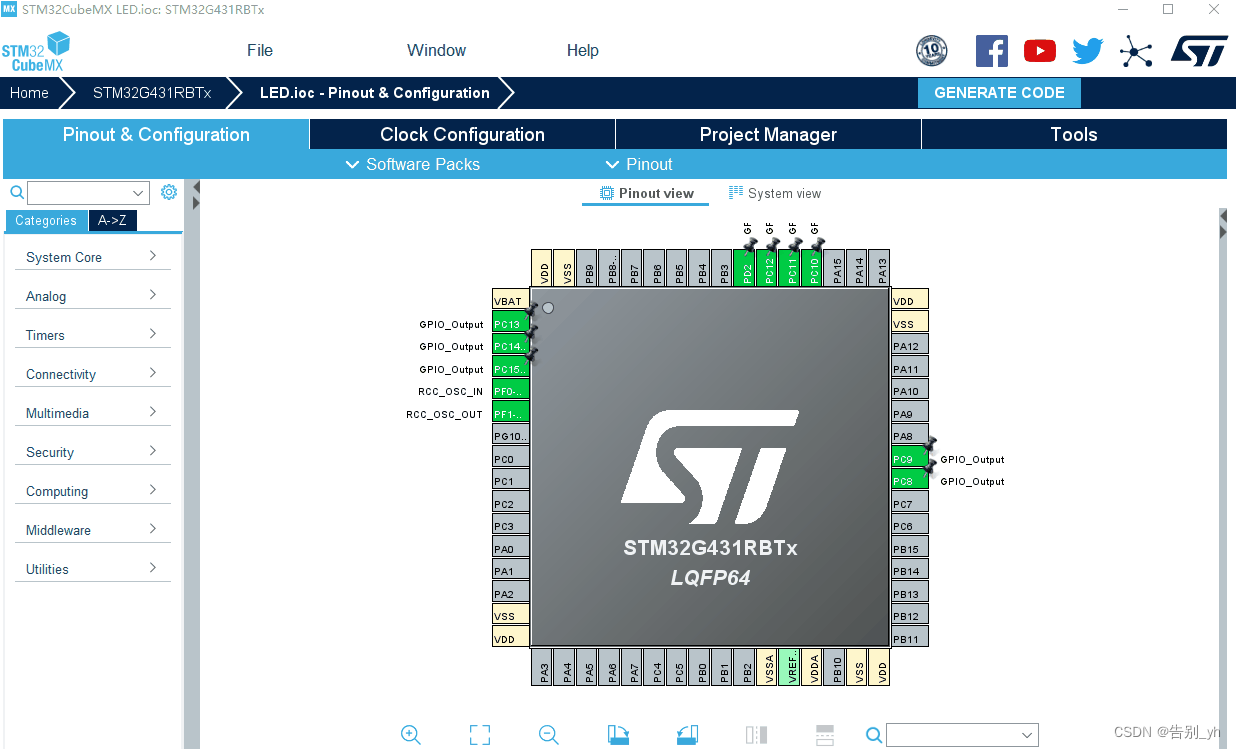
1>对按键进行模块化处理,将按键相关引进配置为GPIO_Input模式
2>将LED相关引进配置为GPIO_Output模式
3>将PC8-PC15的引进电平设置为高电平,将PD2引进设置为低电平,输出模式均为推挽输出
4>设置输出keil工程文件的基本参数,包括工程名字、代码启动软件和版本、设置代码以单独的.c和.h文件以及生成的代码是HAL库还是LL库
3.编程参考
1>使用库函数读取与按键相关引进的电平,判断其是否为低电平;
2>如果是低电平,则使用延时函数,延时10ms消抖;
3>再一次使用库函数分别读取与按键相关引进的电平,判断其是否为低电平;
4>如果是低电平,按照相应的引脚返回键值;
5>在主函数里面,调用按键模块化函数,根据返回到键值,对指示灯执行相应的操作。
uint8_t KEY_Read(void)
{
uint8_t ucKey_Val = 0; // unsigned char unKey_Val = 0;
//if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_0) == GPIO_PIN_RESET)unKey_Val = 1;
//if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_1) == GPIO_PIN_RESET)unKey_Val = 2;
//if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_2) == GPIO_PIN_RESET)unKey_Val = 3;
//if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET)unKey_Val = 4;
if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN2)!=1)
{
HAL_Delay(10);
if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0)==0)
{
ucKey_Val=1;
}
if(HAL_GPIO_ReadPin(GPIOB,GOIO_PIN_1)==0)
{
ucKey_Val=2;
}
if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2)==0)
{
uvKey_Val=3;
}
}
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==0)
{
HAL_Delay(10);
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0)==0)
{
ucKey_Val=4;
}
}
return ucKey_Val;
}
while(1)
{
uint8_t Key_First=0;
Key=KEY_Read();
if(Key!=Key_First)
{
switch(Key)
{
case 1:
LED_Disp(unLed=^0x01);
berak;
case 2:
LED_Disp(unLed=^0x02);
break;
case 3:
LED_Disp(unLed=^0x03) ;
berak;
case 4:
LED_Disp(un;ed=^0x04);
break;
}
}
}














 1565
1565











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









