







摘 要
装载机作为土石方施工的主要机种,随着国家基建发展规模逐渐提升,在新时期拥有广阔的市场前景。“机械—液力”传动的前卸式设备性能良好、应用场景广泛,然而,其工作装置结构仍有进一步优化空间。在此背景下,本文以该型装置为对象,对他的整体结构进行深入的分析和全面的优化研究。首先对装载机的基本结构和他具有的基本特点进行研究,根据他的具体情况运用综合图解法,构建装载机工作装置的结构分析模型,分析装载机工作装置参数间关系;其次,基于工作装置的使用场景确定设计要求,并在此基础上,运用解析法设计动臂限位块位置、动臂板连杆结构和工作装置装配结构。通过研究,取得了以下成果:其一是在现有装载机工作装置结构的基础上,对其动臂限位做进一步优化,降低动臂运动冲撞力,减少散料可能性,提升工作效率。其二是进一步完善了动臂板连杆结构的设计,其三是提升工作装置的整体装配性能。希望能为装载机设计制造、优化升级提供一定的参照与借鉴。
4 装载机工作装置的连接关系与结构设计
4.1 工作装置基本关系的建立
4.1.1 结构分析模型
有装载机工作装置的整体结构可知,其基本结构在纵向具有对称性。因此在对工作装置进行模拟分析的过程中,将之简化为平面连杆机构。以以前车价作为整个工作装置的参考基准,则可以构建如下图4-1所示的平面坐标系:
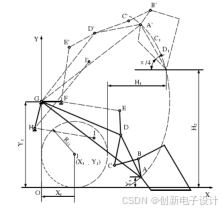
图 4-1 装载机工作装置分析模型
4.1.2 参数间的关系
从装载机工作装置的分析模型以及前文中对装载机各项参数的分析,可以推断在装载机系统中,自由度最高只有2个。所以只要获得铲斗油缸的长度指标和动臂油缸的长度指标,则可以对动臂位置的角度(U)和铲斗位置的角度(UG)进行计算。获得计算结果后,就可以确定整体机构的运行状态。
结合装载机工的装置分析模型,可以构建公式如4-1所示。其中R12用以表示动臂油缸的长度,R7用以表示铲斗油缸的长度。将这两项长度指标看作自变量,则可以给依据三角函数获得公式4-2。
UG=UG4-UG3-UG5 (4-1)
(4-2)
(4-3)
(4-4)
而通过上述计算,可以推测UG为(-6),其中UA1是一个定值,则可知(3-7)。
(4-5)
UG=UG4-UG3-UG5 (4-6)
UG=-(UG2-UD2) (4-7)
在油缸四连杆机构中,可以获得以下关系:
(4-8)
(4-9)
(4-10)
(4-11)
(4-12)
(4-13)
此时,依据三角函数关系,可以对UD1和UD2进行求取,在此基础上可以对∠ADC的角度进行确定。
(4-14)
(4-15)
(4-16)
在铲斗的四连杆机构中,能够得到的机构间关系可以在此基础上推断。
(4-17)
(4-18)
(4-19)
(4-20)
结合上述计算,可以建立结构间关系,将动臂、铲斗的位置角和动臂油缸、铲斗油缸的长度纳入,获得公式4-21.
(3-21)
在公式3-21中,X1、R11、C1、D1、Y1 均为定值。而通过上述计算可以知道,在装载机的最小卸载距离与最大卸载高度。
公式4-1到4-21中所有的符号及其含义如表4-1所示。
表 4-1 公式符号及含义
符号 物理意义 符号 物理意义
R1 动臂AD间长 UG5 GH与Y轴夹角
R2 铰接点A、B长 UG6 动臂上限位置角
R3 连杆BC长 UD1 上下摇臂夹角
R4 下摇臂CD长 UD2 动臂∠GAD
R5 动臂DG长 UA1 AB杆与X轴夹角
R6 上摇臂DE长 UA2 动臂∠GAD
R7 铲斗油缸EF长 L 动臂长
R8 机架杆GF长 H1 卸载距离min
R9 G1长 H2 卸载高度max
R10 机架杆GH长 H3 斗底长
R11 前轮胎半径 H4 下挖深
R12 动臂油缸HI长 Y1 G距地面高
UG1 机架杆GF与Y轴夹角 Y3 A距地面高
UG2 动臂夹角∠AGD Xj;Yj 前桥中心坐标
UG3 ∠LGA UG 动臂位置角
UG4 ∠IGU U 铲斗位置角
4.2 工作装置的结构设计
4.2.1 动臂限位块位置
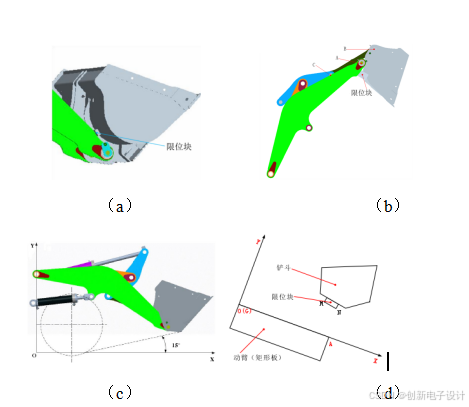
根据工作装置的工位运动特点分析,在运输工况中,通过增设限位块可以减少铲斗运动过程中受到的冲击力,避免与之关联的其他薄弱部件受损,同时也减少因铲斗“点头”而造成的物料散落(如图4-2a)。在卸料工况中,增设限位块可以防止A、B、C三点处在同一直线上。若不增加限位块,则在卸载时,动臂与铲斗之间会剧烈碰撞(4-2b)。因此,出于保护动臂与铲斗的目的,采用上下两组限位块对铲斗位移进行限制。
结 论
本文针对“液力—机械”前卸式设备的工作装置展开优化设计,首先构建装载机工作装置的结构分析模型,分析装载机工作装置参数间关系,其次,设计动臂限位块位置、动臂板连杆结构和工作装置装配结构。本文通过研究,获得了以下成果:
(1)在现有装载机工作装置结构的基础上,对其动臂限位做进一步优化,降低动臂运动冲撞力,减少散料可能性,提升工作效率。
(2)在完善动臂板连杆结构设计与装配。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









