






 本文介绍了如何利用arduinonano单片机配合MPU6050陀螺仪和舵机,通过PID算法实现模拟鸡头的头部保持功能。重点讲解了PID算法的工作原理和在代码中的应用,包括PID控制器的编写和参数调整。
本文介绍了如何利用arduinonano单片机配合MPU6050陀螺仪和舵机,通过PID算法实现模拟鸡头的头部保持功能。重点讲解了PID算法的工作原理和在代码中的应用,包括PID控制器的编写和参数调整。
目录
工具
arduino nano
MPU6050三轴陀螺仪
sg90舵机两个
二自由度云台
介绍
《模拟鸡头》
转动云台,让头部保持在一个位置不转动,通过舵机自我调节。
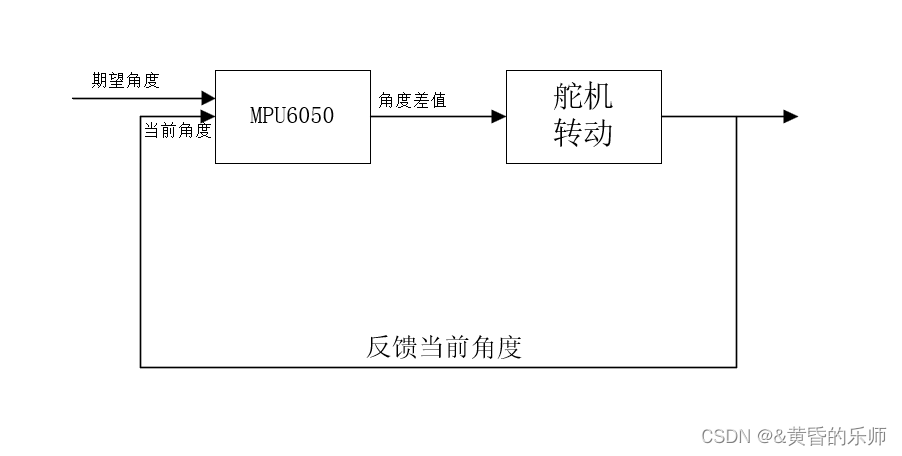
基于arduino nano单片机,陀螺仪解算出姿态角度,利用PID算法算出角度差值赋给舵机。
需要了解一定的PID算法,并且学会调参(主要是调参比较难),还要学会MPU6050(或其他陀螺仪,能解算出姿态就行)的应用。
PID 实指“比例”、“积分”、“微分”,这三项构 成 PID 基本要素。数字 PID 控制算法通常分为位置式 PID 控制算法和增量式 PID 控制算法。
比例P : 目标值 - 当前值
积分I : 误差的累加
微分D : 这次误差-上次误差
P(比例)作用:对当前时刻的偏差进行比例放大。
I(积分)环节:对过去所有时间的偏差进行积分。
D(微分)环节:通过偏差的偏差,对控制系统的输出走向进行预判,起超前调节的作用。
常用的位置式PID:

可以加一个积分限幅,因为误差达到饱和时为防止一直积累,可以增加限幅来停止积分作用
所以我感觉可以只用单一的P控制器或者PD来结算误差,毕竟现在不要求太高精度,如果要达到好的效果就要用到积分。
这里提供PID模拟器,可以帮助你理解PID的作用
链接:https://pan.baidu.com/s/1MiCkuNO5Izwt-dLrM5QnBg
提取码:HHHH
主要流程如下图
代码如下
PID部分
int pid1(int a,int b){
float kp=0.68,ki=0.002,kd=0.3;
float pwm;
a= map(a,-45,45,0,180);
curren_err = a-b;
leijia+=curren_err;
if(leijia>5)leijia=5;
if(leijia<-5)leijia=-5;
pwm = kp*curren_err+ki*leijia+kd*(curren_err-last_err);
last_err = curren_err;
return pwm;
}在循环中应用此函数算出误差即可
全部代码如下
#include <MPU6050_tockn.h>
#include <Servo.h>
Servo duo1;
Servo duo2;
float y,x;
MPU6050 mpu6050(Wire);
float tar=0,curren_err,last_err,pre_err,leijia;
int pid1(int a,int b){
float kp=0.68,ki=0.002,kd=0.3;
float pwm;
a= map(a,-45,45,0,180);
curren_err = a-b;
leijia+=curren_err;
if(leijia>5)leijia=5;
if(leijia<-5)leijia=-5;
pwm = kp*curren_err+ki*leijia+kd*(curren_err-last_err);
last_err = curren_err;
return pwm;
}
void setup() {
// put your setup code here, to run once:
duo1.attach(3);
duo2.attach(5);
Serial.begin(9600);
Wire.begin();
mpu6050.begin();
mpu6050.calcGyroOffsets(true);
}
void loop() {
// put your main code here, to run repeatedly:
mpu6050.update();
//Serial.print(mpu6050.getAngleY());
Serial.print(" ");
//Serial.println(mpu6050.getAngleX());
y=mpu6050.getAngleY();
x=mpu6050.getAngleX();
duo1.write(pid1(y,tar));
duo2.write(pid1(x,tar));
Serial.print(pid1(y,tar));
Serial.print(" ");
Serial.println(pid1(x,tar));
}

















 838
838

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









