






毕设帮助、开题指导、技术解答(有偿)见文末。
目录
摘要
在当今大规模制造业中,企业为提高生产效率,保障产品质量,普遍重视生产过程的自动化程度,工业机器人作为自动化生产线上的直要成品,逐渐被企业所认同并采用。工业机器人的技术水平和应用程度在一定程度上反映了一个国家工业自动化的水平,目前,工业机器人主要承担着焊接、喷涂、搬运以及堆垛等重复性并目劳动强度极大的工作。工作方式一般采取示教再现的方式。
本文将设计一台四自由度的工业机器人,用干给冲压设备运送物料。首先,本文将设
计机器人的底座、大臂、小臂和机械手的结构,然后选择合适的传动方式、驱动方式,搭
建机器人的结构平台;在此基础上,本文将设计该机器人的控制系统,包括数据采集卡和
伺服放大器的选择、反馈方式和反馈元件的选择、端子板电路的设计以及控制软件的设计,
重点加强控制软件的可靠性和机器人运行过程的安全性,最终实现的目标包括:关节的伺
服控制和制动问题、实时监测机器人的各个关节的运动情况、机器人的示教编程和在线修
改程序、设置参考点和回参考点。
关键词:机器人,示教编程,伺服,制动
一、硬件方案
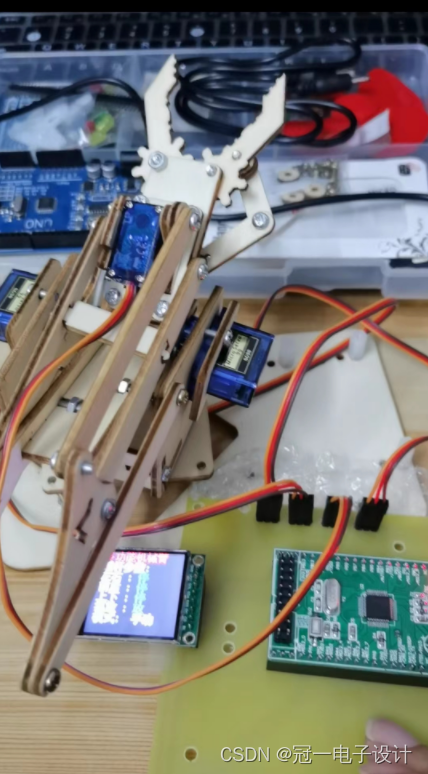
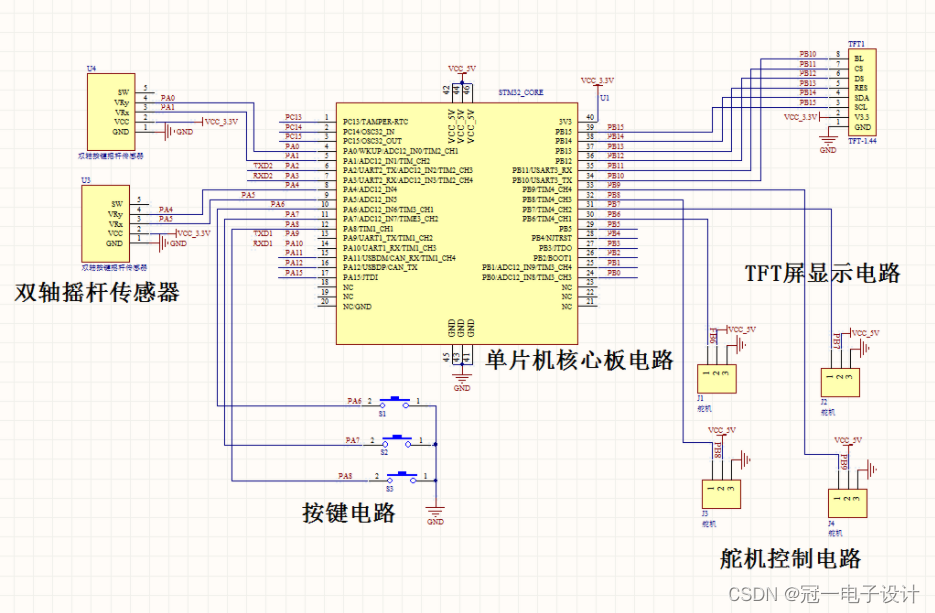
本系统采用STM32单片机+时钟晶振电路+复位电路(上电自复位,手动复位)+ 1.44寸TFT彩屏 + 四路舵机(搭配机械臂四个自由度控制) + 2路摇杆(四个方向)+ 按键及电源组成。
二、设计功能
1、该系统由2个摇杆表达四个方向,对应驱动控制四个舵机的运行,搭配机械臂结构能够表达左右云台转动、前后机械臂运动、抓放轻物品及上下运动功能。
2、该系统分为“手动模式”、“学习模式”、“自动模式”,可以通过按键进行切换模式。上电默认是手动模式。
3、“手动模式”:通过2路摇杆左右、前后操作,控制四个舵机运动,搭配机械臂并能够抓取运输轻物品;摇杆操作时机械臂相应动作,不操作时静止不动。
4、“学习模式”:学习过程用到手动模式的操作,即通过2个摇杆的四个方向,分别能够控制四个舵机搭配机械臂运行。运动到某个需要记录的位置时,通过按键按下对当前四个自由度的舵机状态进行记录,最多记录20条动作,一般7个动作就能够表达出一个抓取、运输、投放等动作功能。并且对学习的动作步骤进行显示统计,方便在自动模式下进行运行。
5、“自动模式”:在学习模式学习后,进入该模式,(如果没有做过学习,无法进入自动模式)机械臂自动执行学习模式下学习的动作,比如学习模式中学习了,抓取、运输、投放等功能;该自动模式自动按照学习的运行动作反复抓取、运输、投放。并且能够显示当前操作步骤是学习模式下学习的第几步。
6、“复位模式”为隐含模式,任何情况下通过按键按下,能够恢复多节到原始位置。即按下其它按键后,四个舵机自动运行到上电时初始位置,然后退出复位模式返回到手动控制模式。
三、实物图
四、原理图
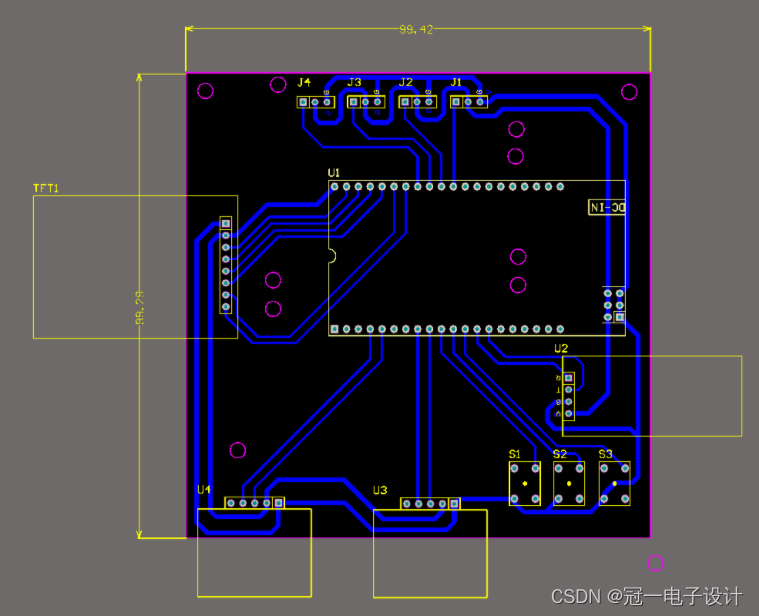
五、PCB图
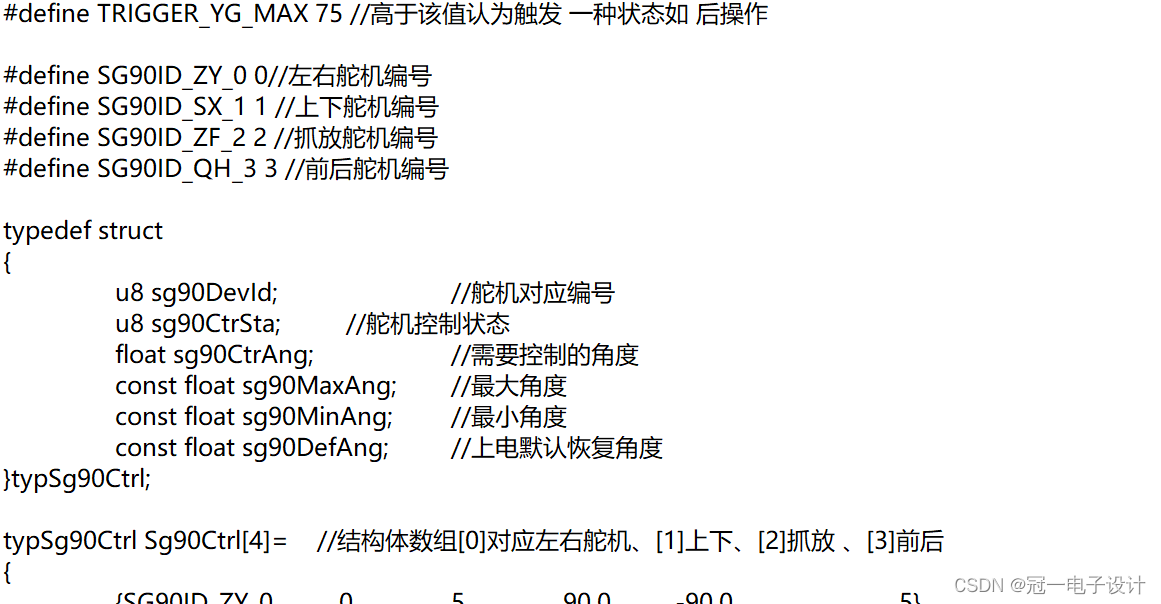
六、程序源码
七、资料包括
需要完整的资料可以点击下面的名片,找我要资源压缩包的百度网盘下载地址及提取码。
















 3128
3128











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











