






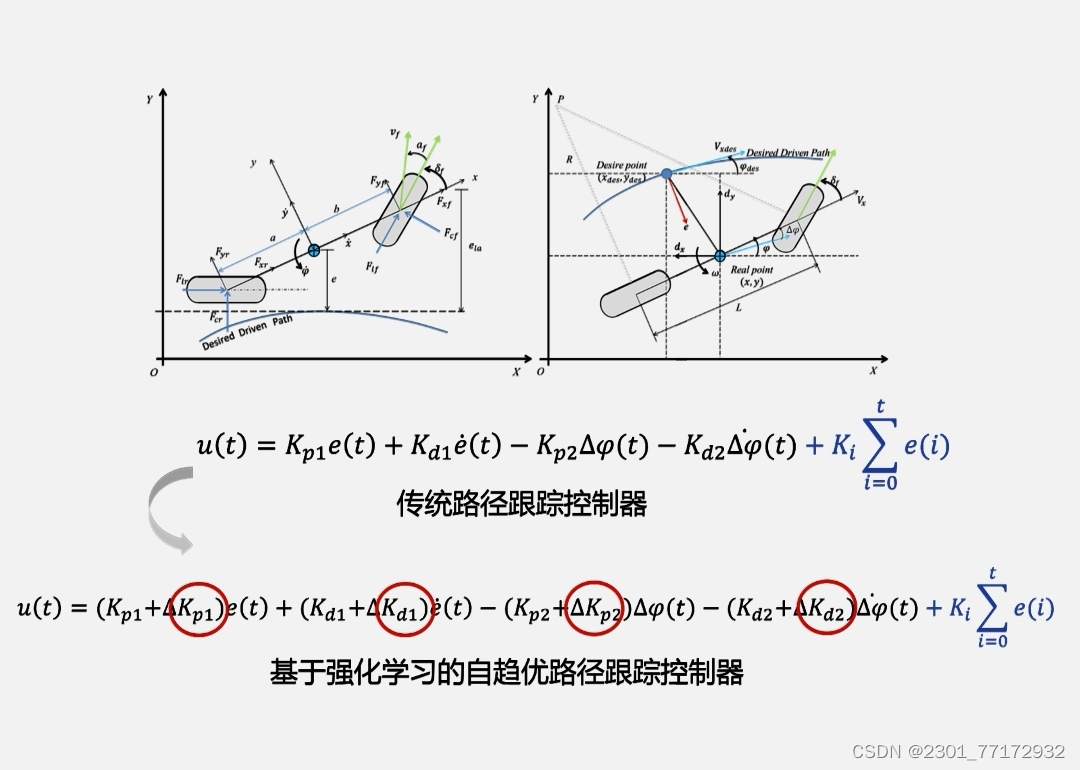
自动驾驶车辆运动控制过程中,对PID控制参数的优化和整定。
传统PID控制算法,由于参数固定,在道路曲率较大和车速变化情况下难以满足控制需求,采用RL强化学习算法(DDPG算法,Actor-Critic框架)可实现控制参数的在线优化,科研就是这么有趣,
ID:554000671247877301
自动驾驶车辆运动控制过程中,对PID控制参数的优化和整定。
传统PID控制算法,由于参数固定,在道路曲率较大和车速变化情况下难以满足控制需求,采用RL强化学习算法(DDPG算法,Actor-Critic框架)可实现控制参数的在线优化,科研就是这么有趣,
ID:554000671247877301
 1062
1062

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























