






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。当哲学课上老师问你什么是科学,什么是电的时候,不要觉得这些问题搞笑。哲学是科学之母,哲学就是追究终极问题,寻找那些不言自明只有小孩子会问的但是你却回答不出来的问题。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能让人胸中升起一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它居然给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
四旋翼飞行器(也称为四轴飞行器或无人机)是现代航空技术中一个重要的研究领域,它结合了多学科的技术和理论。这类飞行器通常配备四个电机和螺旋桨,以提供升力和控制。以下是四旋翼飞行器及电机动力学的几个关键研究领域:
### 1. 设计与结构
四旋翼飞行器的设计要确保结构稳定且轻便。飞行器的设计需要优化以实现良好的空气动力性能和足够的载荷能力。每个旋翼的位置、大小和形状都会影响整体性能。
### 2. 电机和螺旋桨动力学
- **电机选择**:选择合适的电机大小和类型(如无刷直流电机)对于保证足够的推力和效率至关重要。
- **螺旋桨分析**:螺旋桨的尺寸、角度和形状会直接影响飞行器的升力和控制能力。通过优化螺旋桨设计,可以改善飞行性能和能量效率。
### 3. 控制系统设计
控制系统确保飞行器可以稳定飞行并按预定路径移动。这通常涉及到PID控制、模糊逻辑或现代控制理论,比如LQR(线性二次调节器)。
- **飞行控制算法**:这些算法负责处理传感器数据,并通过调整电机速度来控制飞行器的姿态和位置。
- **传感器集成**:包括陀螺仪、加速度计、磁力计等,它们提供必要的环境和飞行数据,以指导飞行控制。
### 4. 动力学模拟
通过物理建模和计算机模拟,研究人员能够预测和优化飞行器在不同条件下的表现。常用的模拟软件包括MATLAB/Simulink、ROS(Robot Operating System)等。
### 5. 实验验证
实际测试是理论和模拟研究的重要补充。通过实际飞行测试,可以验证模型的准确性,改进设计,并优化控制策略。
### 6. 应用研究
四旋翼飞行器在许多领域都有实际应用,如航拍、灾区搜索与救援、农业监视、货物运输等。研究团队需要针对不同应用场景,设计和优化特定的飞行器模型和控制策略。
通过这些研究领域的探索,科学家和工程师可以不断提升四旋翼飞行器的性能和应用范围,实现更多的创新应用。
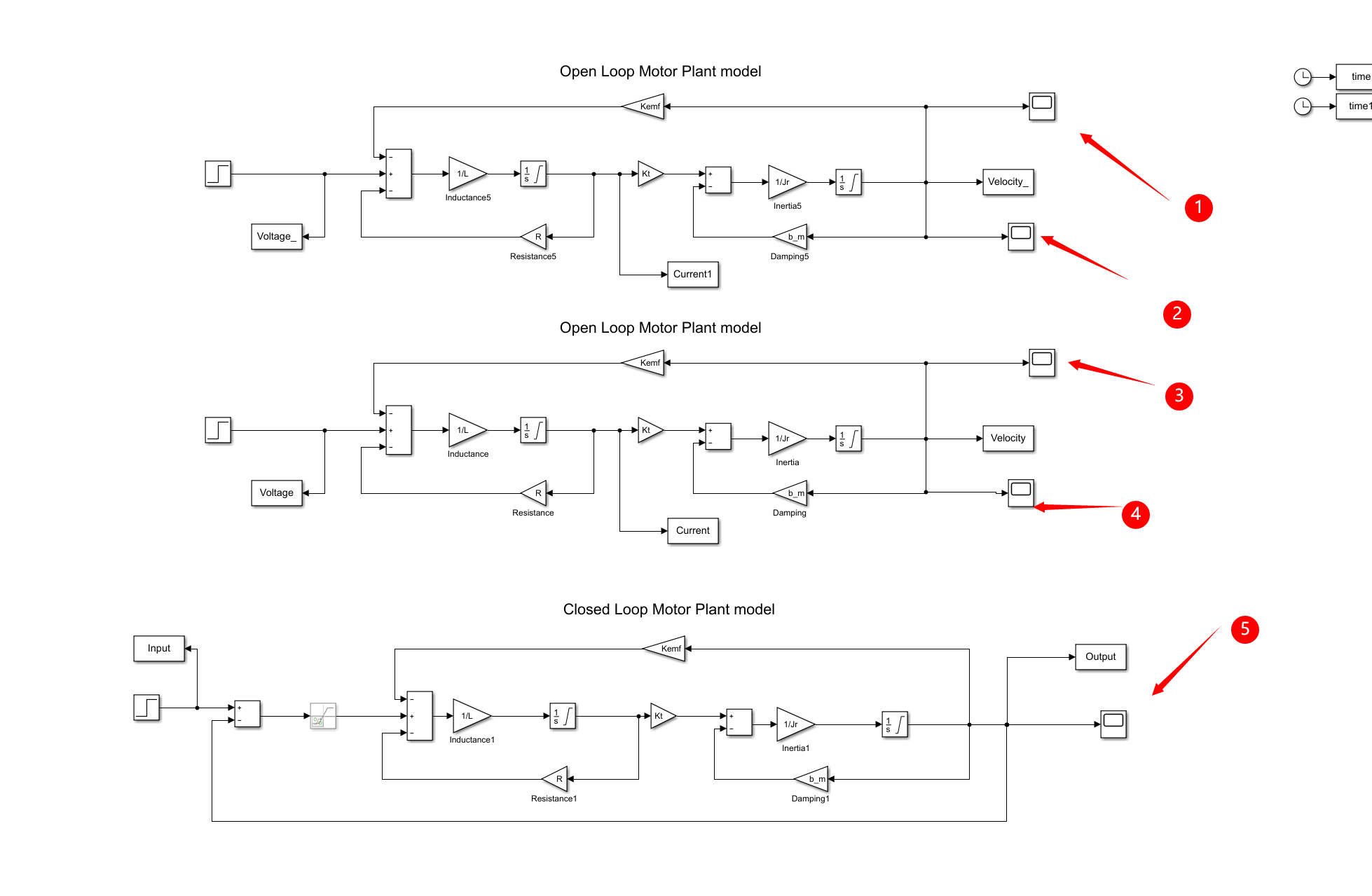
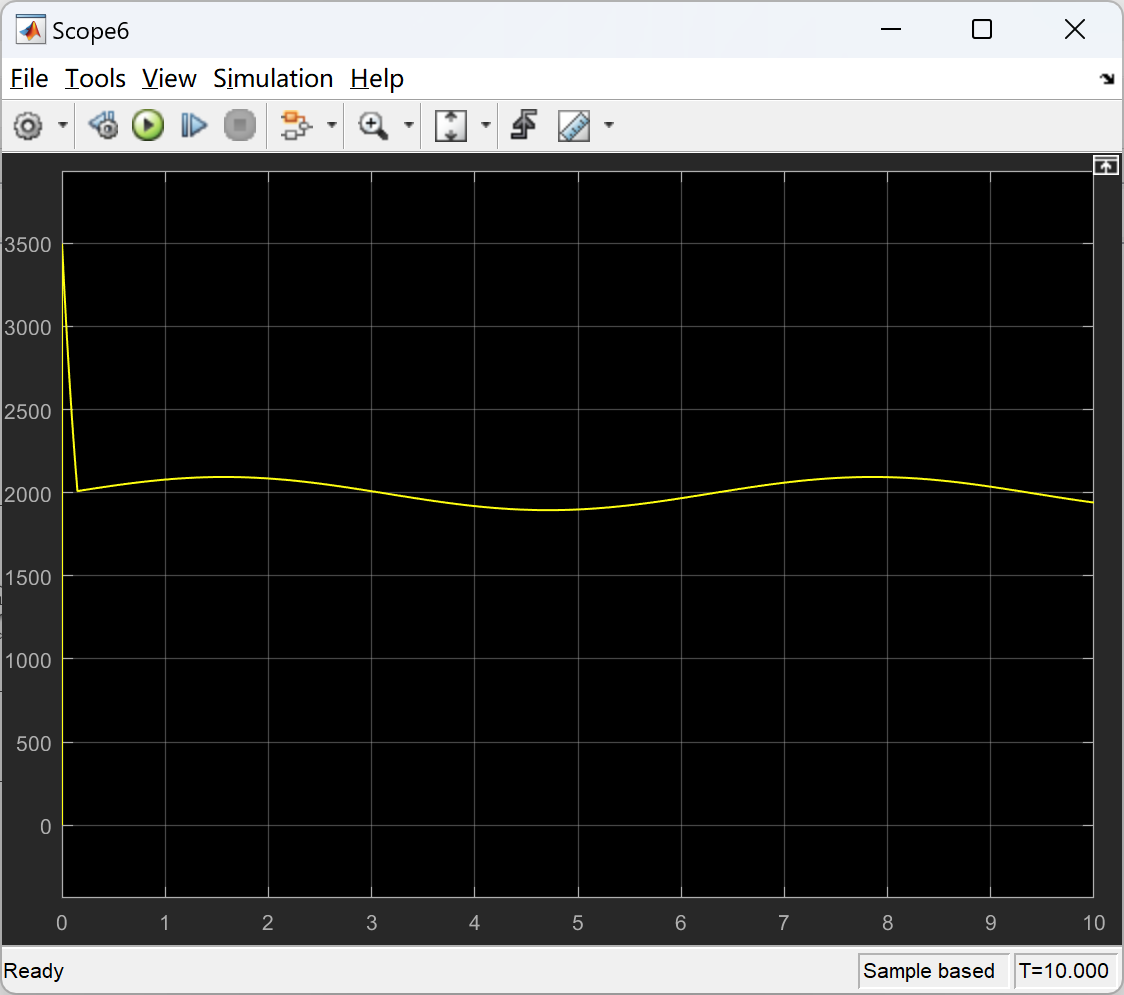
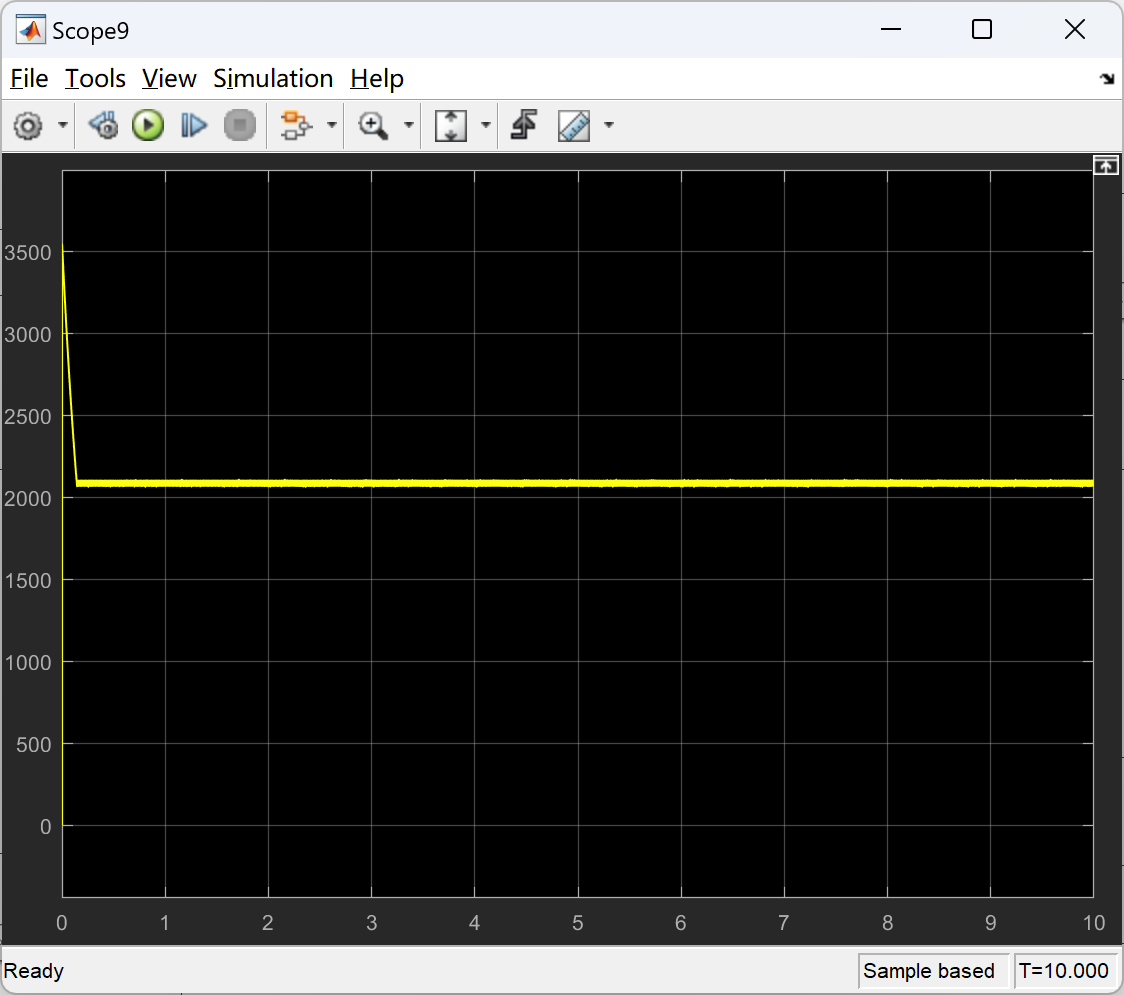
📚2 运行结果













部分代码:
% Quadrotor constants
Ixx = 7.5*10^(-3); % Quadrotor moment of inertia around X axis
Iyy = 7.5*10^(-3); % Quadrotor moment of inertia around Y axis
Izz = 1.3*10^(-2); % Quadrotor moment of inertia around Z axis
Jr = 6.5*10^(-7); % Total rotational moment of inertia around the propeller axis 6.5*10^(-6)
b = 1.144e-08; % Thrust factor
d = 9.94e-10; % Drag factor 1.0876e-9
l = 0.23; % Distance to the center of the Quadrotor
g = 9.81; % Gravitational acceleration
weight =.284; %kg Weight=mg (from a scale)
m = weight/g; % Mass of the Quadrotor in Kg
b_m=2.415e-6;
R=0.117; %Motor Resistance
L=0.001*R; %Electric Inductance
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]岂伟楠.小型四旋翼飞行器导航与控制系统研究[D].内蒙古科技大学,2013.DOI:10.7666/d.D426375.
[2]吴瀚文.四旋翼飞行器抗风控制研究[D].哈尔滨工业大学,2016.DOI:10.7666/d.D01098253.
[3]岂伟楠.小型四旋翼飞行器导航与控制系统研究[D].内蒙古科技大学[2024-05-23].
[4]哈天(HATEM BELMILOUD).四旋翼无人飞行器的动力学建模及控制系统设计[D].北京理工大学[2024-05-23].DOI:CNKI:CDMD:2.1018.812199.
🌈4 Matlab代码、Simulink仿真实现
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取
















 541
541











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









