







整理了无人机资源提供给大家:
本资源四旋翼无人机的建模、姿态控制和定点位置控制三大部分,并在定点位置控制的基础上实现了一个简单的航点规划功能。
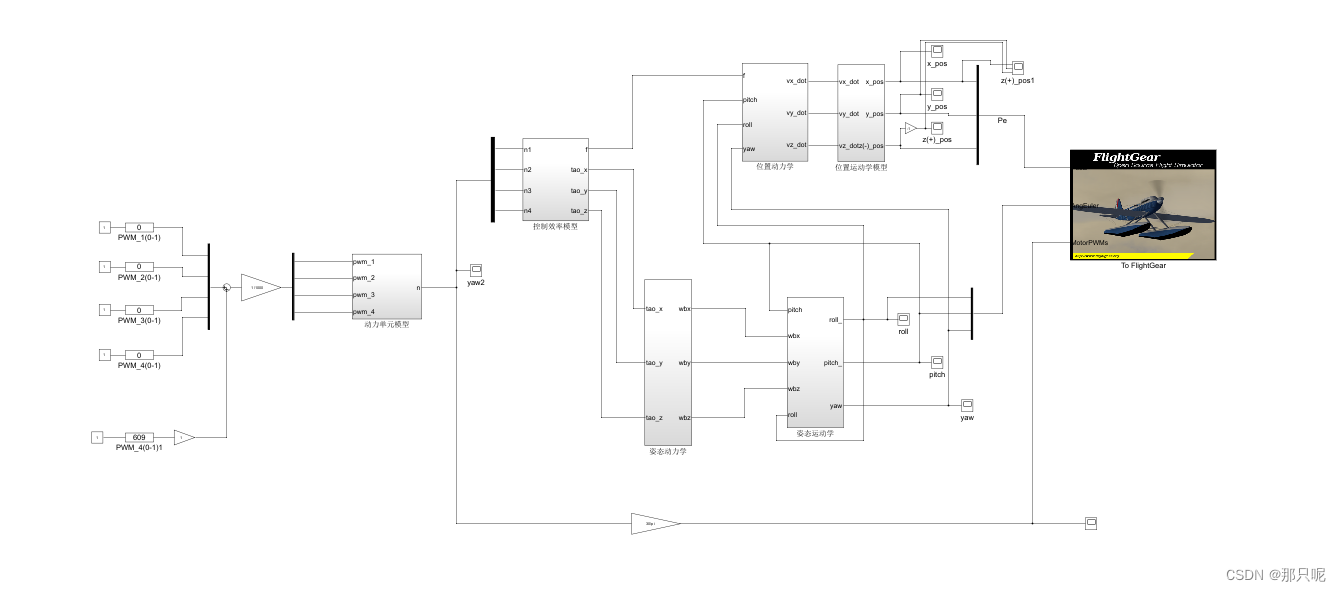
- 建模包含了无人机的动力单元模型、控制效率模型和多旋翼的刚体模型,后面的姿态控制和定点位置控制均基于此无人机模型实现;
- 控制器设计包含了无人机的位置控制器设计和姿态控制器设计,姿态控制是为位置控制打基础的;
- 航点规划:在实现位置控制的基础上,给定无人机一系列预先设置好的航点,让无人机依次到达这些点,从而实现简单的航点规划效果。
多旋翼无人机的建模一共包含了3部分,动力单元模型、控制效率模型和多旋翼的刚体模型,其中多旋翼的刚体模型包含了刚体的动力学模型和运动学模型。动力学模型输出的都是加速度信息,供运动学模型使用。
模型获取链接:四旋翼无人机的建模、姿态控制和定点位置控制simulink仿真
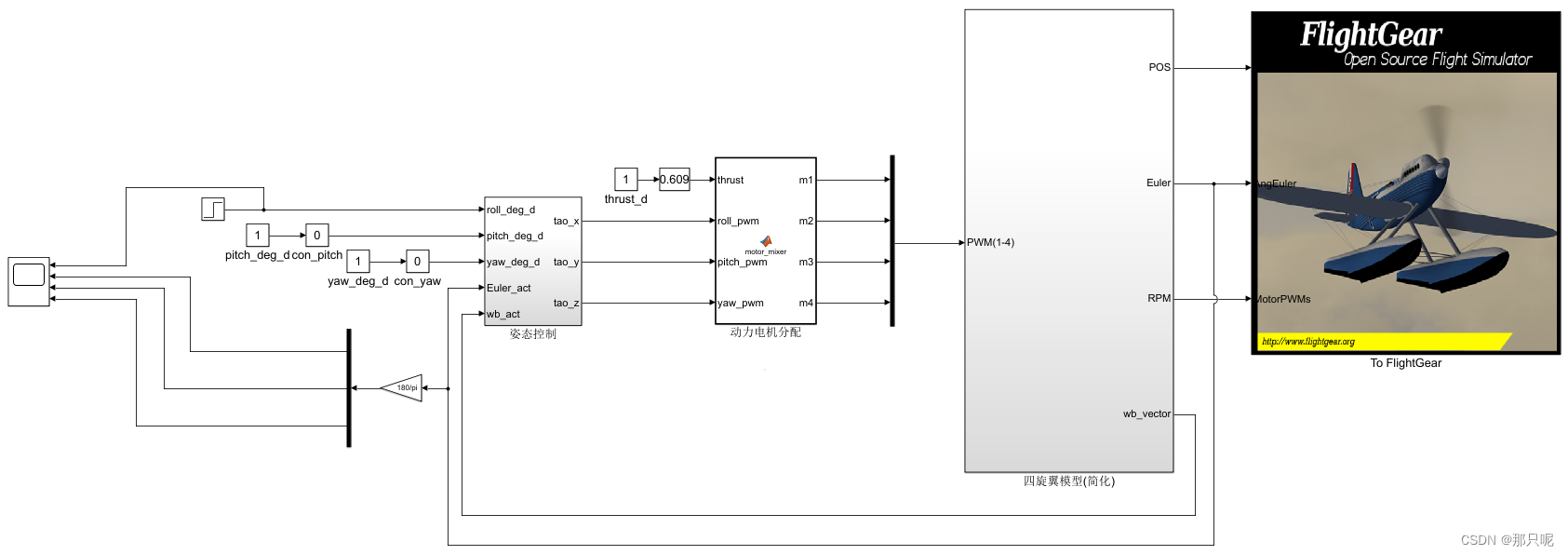
姿态控制器仿真:

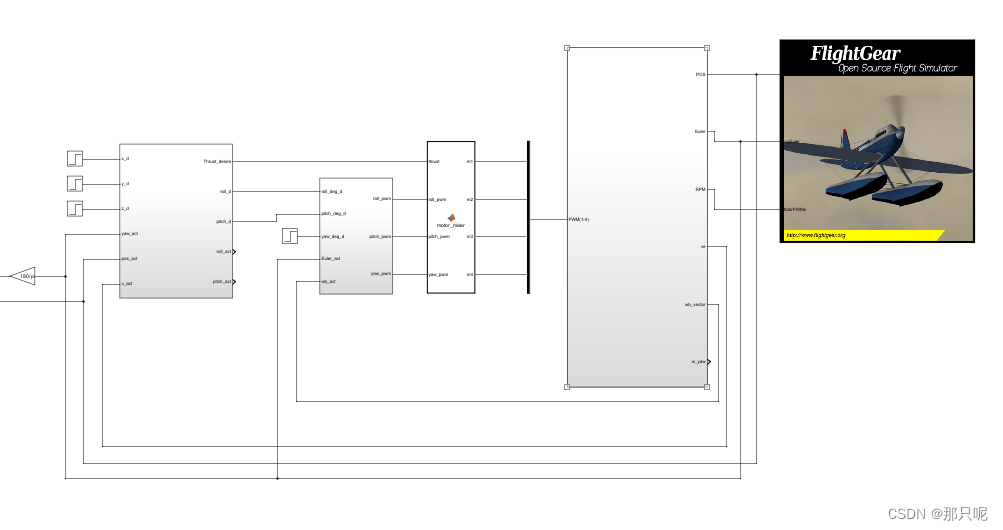
位置控制:
笔记文档:















 870
870

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









