






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
一、引言 调频连续波(FMCW)雷达作为一种常用的雷达体制,在众多领域有着广泛应用,比如汽车的防撞预警、智能交通系统中的车辆监测以及无人机的避障等。在实际场景中,往往存在多个运动目标,准确检测这些多运动目标对于提升系统安全性、实现高效管控等方面起着关键作用。
二、调频连续波雷达原理 调频连续波雷达通过发射频率随时间连续变化的信号,该信号遇到目标后会产生反射波,反射波与发射波之间存在频率差(差频),这个差频与目标和雷达之间的距离、相对速度等信息相关。通过对接收信号进行处理,分析差频等参数,就能获取目标的距离、速度等关键数据。其发射信号的频率调制方式常见的有三角波调制、锯齿波调制等,不同调制方式各有特点且适用于不同的应用场景
三、多运动目标检测面临的挑战 1. 目标回波叠加问题:多个运动目标反射回来的回波信号会在接收端叠加在一起,使得分离各个目标的回波并准确提取对应目标的信息变得困难,很容易造成信息混淆,影响后续对目标的准确判断。 2. 多普勒频移多样性:不同运动目标由于速度不同,其产生的多普勒频移不一样,并且在多目标情况下,频移情况复杂,如何准确区分不同目标对应的频移来获取速度信息是一大挑战。 3. 复杂环境干扰:实际应用环境中存在各种杂波干扰,例如建筑物、树木等静止物体反射的回波以及其他电磁干扰等,这些干扰信号会混入目标回波中,增加了目标检测的难度,容易导致误判或者漏判目标的情况出现。
四、常用的多运动目标检测方法 1. 基于时域分析的方法:通过分析接收信号在时域上的波形特征,比如回波信号的到达时间先后顺序等,结合目标运动模型,尝试分离不同目标的回波。例如可以利用匹配滤波等技术在时域中找到不同目标对应的回波峰值来确定目标的距离等信息,但对于距离较近且回波重叠严重的目标检测效果可能受限。 2. 基于频域分析的方法:对接收信号进行快速傅里叶变换(FFT)等频谱分析操作,将时域信号转换到频域,利用不同目标对应的差频和 Doppler频移在频域上表现出的不同频谱特性来区分目标。像利用二维FFT可以同时获取目标的距离和速度信息,不过计算量相对较大,且对于频谱分辨率要求较高,否则容易出现目标分辨不清的情况。 3. 现代信号处理技术结合的方法:例如将小波变换、时频分析方法(如短时傅里叶变换、Wigner-Ville分布等)与传统的检测方法相结合,利用这些方法在时频域同时具备良好分辨率的优势,更好地刻画多目标情况下复杂的回波信号特征,提升目标检测的准确性和分辨率,但算法往往较为复杂,实现成本较高。
五、应用领域 1. 智能交通领域:可以同时检测道路上多个行驶的车辆,获取它们的距离、速度、行驶方向等信息,为交通流量监测、自适应巡航控制、防撞预警等系统提供关键数据,保障道路交通安全和提升交通运行效率。 2. 安防监控领域:检测监控区域内多个运动的人或物体,判断是否有异常入侵行为,有助于及时发现安全隐患并采取相应措施,实现智能化的安防监控。 3.航空航天领域:在飞机着陆过程中检测跑道上可能出现的多个运动障碍物,或者在空中监测周边多个飞行目标(如无人机等),保障飞行安全。
六、发展趋势 1. 算法优化改进:不断研究更高效、准确且计算复杂度低的多目标检测算法,以应对复杂多变的实际应用场景,提升检测性能,减少误报和漏报情况。 2. 与其他技术融合:比如与人工智能技术(如深度学习)相结合,利用深度学习强大的特征提取和模式识别能力,自动学习多目标回波的复杂特征,实现更智能化的目标检测;还可以与通信技术融合,实现雷达与其他设备间更好的数据交互和协同工作。 3. 小型化和低成本化:使得调频连续波雷达多运动目标检测系统能够更广泛地应用于更多民用领域和小型设备中,拓展其应用范围,满足不同用户群体的需求。 总之,调频连续波雷达多运动目标检测有着重要的应用价值,但也面临诸多挑战,随着相关技术的不断发展和创新,其检测性能有望不断提升,应用前景也将更加广阔。
📚2 运行结果
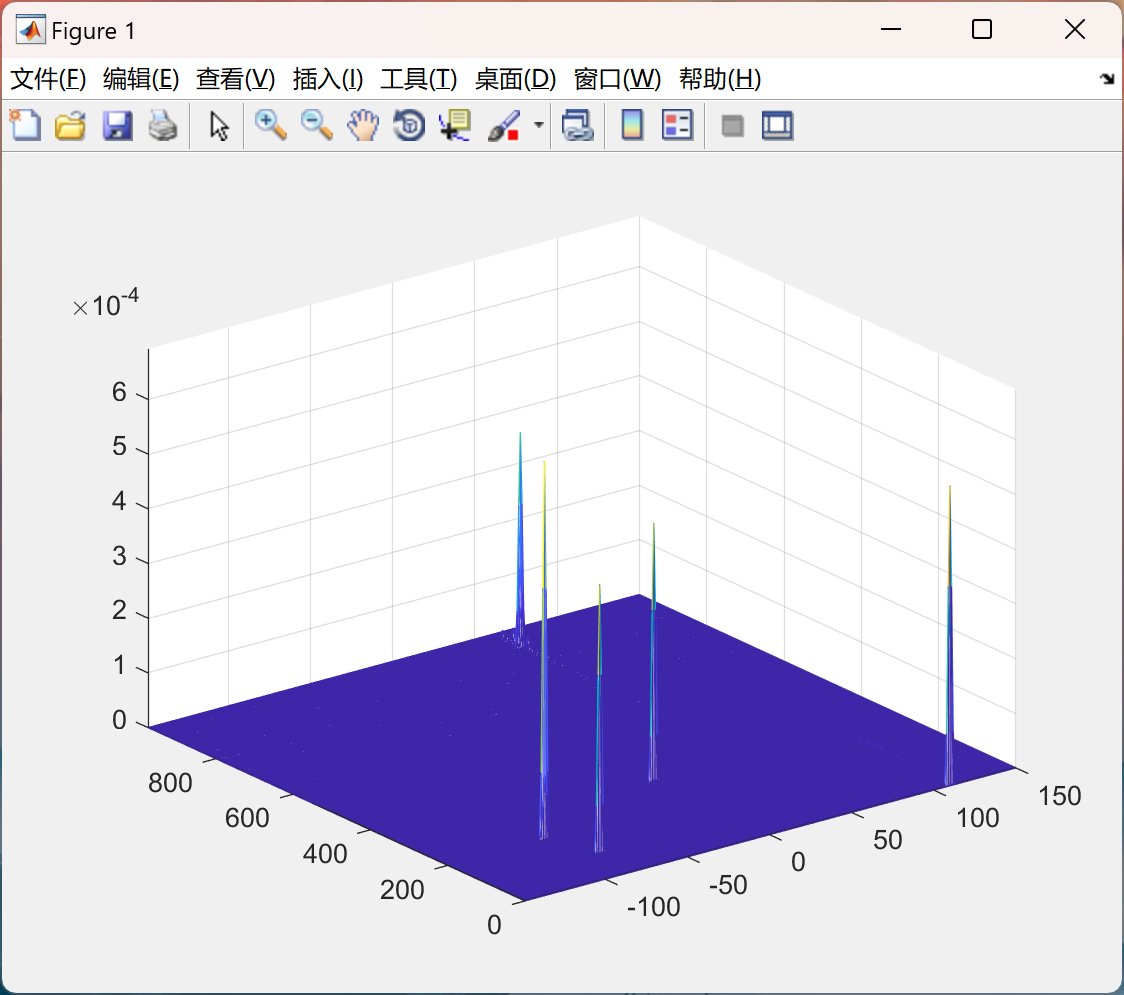
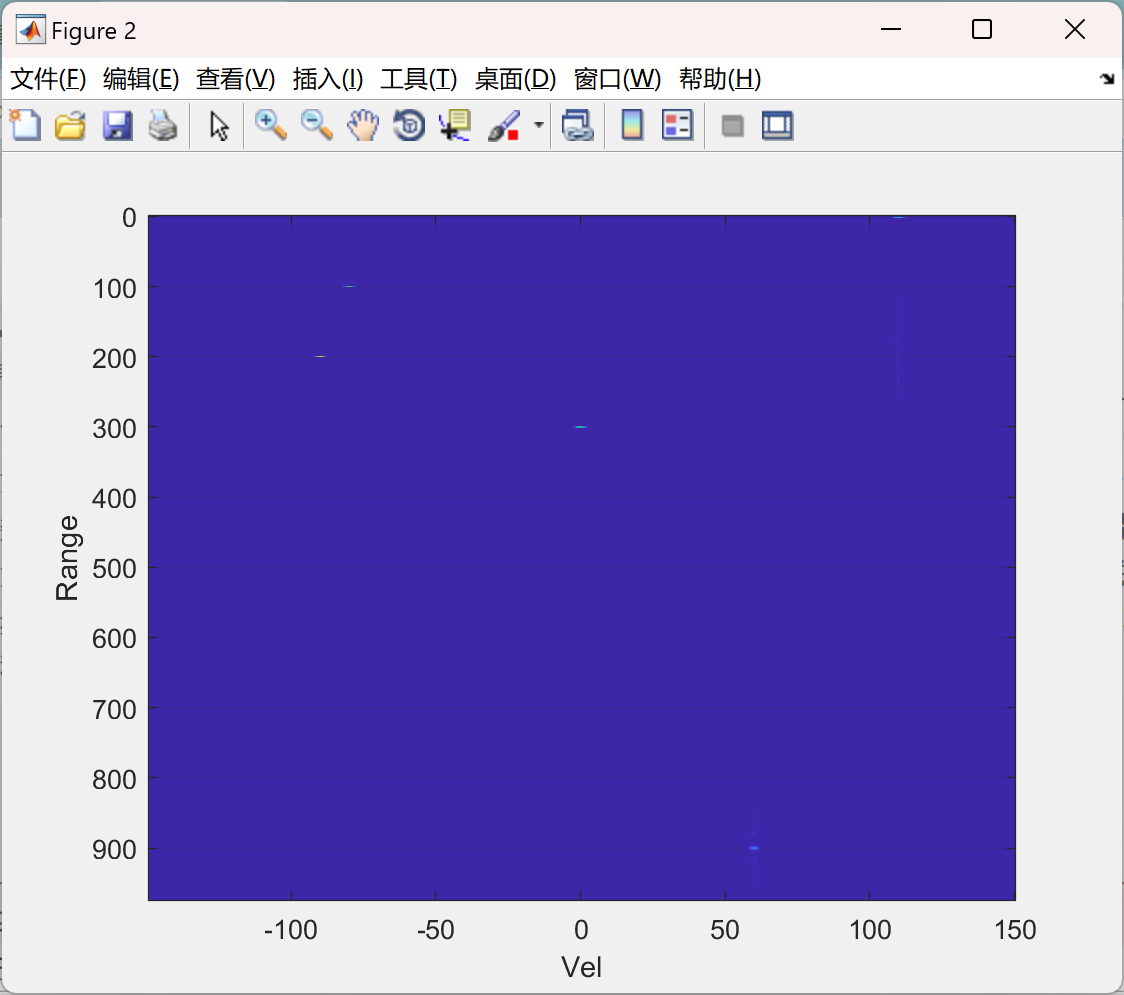
主函数部分代码:
clear all;
close all;
load fmcwmatlab2018data;
x=cube;
[nrn,nan]=size(x);
matchingcoeff=getMatchedFilter(waveform);
mlength=length(matchingcoeff);
lambda=c/fc;
fx=fftshift((linspace(-prf/2,prf/2-prf/nan,nan))*2*pi);
Vel=-fx/2*lambda/2/pi;
ts=(0/fs:1/fs:(nrn-1)/fs).';
% Eliminating the frequency shift in frequncy domain
x=fft(x,nrn,1);
x=fft(x,nan,2);
u=exp(1i*4*pi/lambda*(ts*Vel)); %
u=fft(u,nrn,1);
for k=1:nan
x3=cconv(x(:,k),u(:,k),nrn);
x(:,k)=x3/nrn;
end
x=ifft(x,nrn,1);
x=ifft(x,nan,2);
% Construct the signal generating matrix
z=zeros(nrn,nrn-mlength);
Rs=0:Rresolution:(nrn-1)*Rresolution;
L=(4*pi*Rs*2/lambda).^2;
L=L/max(abs(L));
L=1./L;
L(1)=L(2)*1;
L(end-mlength+1:end)=ones(mlength,1);
for k=1:nrn-mlength
z(:,k)=circshift(sig,k-1)*L(k);
end
% the noise added to the signal
noiseadd=[wgn(nrn-mlength+1,mlength,20*log10(2.0324*1e-9),'complex');zeros(mlength-1,mlength)];
for k=1:mlength
noiseadd(:,k)=circshift(noiseadd(:,k),k-1);
end
z=[z noiseadd];
% Solve the problem throught the Least Square method
x=pinv(z'*z)*z'*x;
% Because for close range and high speed targets, the side lobe in the velocity direction is very
% high, so the chebwin window is added to lower the side lobe. This step
% perhaps is unnecessary for far range target such as farther than 5
% meters;
w=chebwin(nan);
for k=1:nrn
x(k,:)=x(k,:).*w.';
end
x=fft(x,nan,2);
x=fftshift(x,2);
% Because for close range and high speed targets, the side lobe severely
% effect the detection, so for far range such as farther than 5 meters, these
% lines need not be zeroed.
x(:,1)=0*x(:,1);
x(:,2)=0*x(:,2);
x(:,end)=0*x(:,end);
x(:,end-1)=0*x(:,end-1);
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]张家琦,刘芳,曾操,等.联合雷达与光电设备的破裂航迹关联方法[J/OL].系统工程与电子技术,1-10[2024-12-15].http://kns.cnki.net/kcms/detail/11.2422.TN.20241212.1458.019.html.
[2]史炜东.激光雷达技术在露天煤矿征地外业调查中的应用[J].露天采矿技术,2024,39(06):28-31.DOI:10.13235/j.cnki.ltcm.2024.06.006.
🌈4 Matlab代码实现



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









