






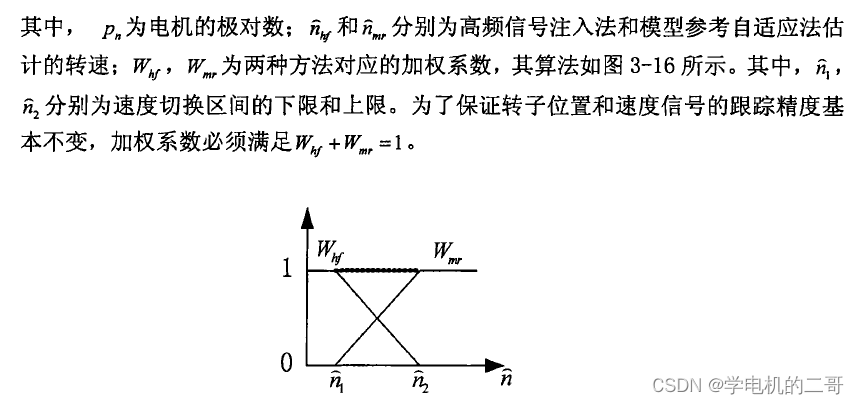
学习无传感的朋友都知道,为了适用包括零速在内全速度范围内PMSM转子位置自检测和无传感器运行可以考虑将高频信号注入法与模型参考自适应法相结合,取长补短地构成一种新型转子位置自检测的复合方法即低速时采用高频信号注入法中最常用的旋转高频电压信号注入法以保证低速时转子速度和位置的检测精度;高速时采在高速的时候要用到模型法,在低速度的时候要用到高频电压注入法,如何平滑的解决高速和低俗的切换,成为了当今研究的重要领域。
文章中用了基于MRAS模型自适应法,和高频注入法结合,在切换中采用加权算法估算转子位置和速度。这种复合方法既能够在低速时准 确地观测出转子的空间位置和速度,也能够保证高速运行时较快的动态响应,是一种实现永磁同步电机全速范围内无传感器运行的实用方法。
其中两种模型的原理,仿真,在前面的文章中都有提到,今天主要介绍一下,如何实现两种模型的切换原理。
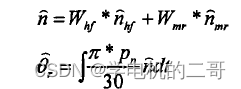
为了确保两种方法的平滑切换,在速度切换区内采用加权算法估算转子位 置和速度。转子速度和位置n和theta
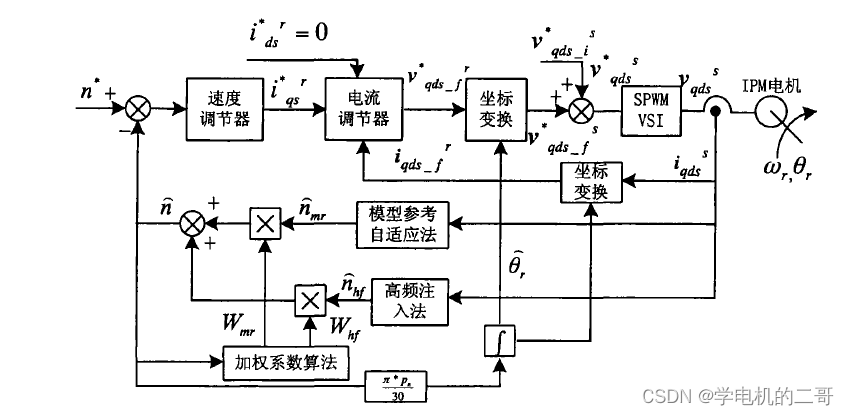
 原理图如下:
原理图如下:
仿真整体模型如下,上面的是模型自适应,下面为高频电压注入,加权算法用函数实现。
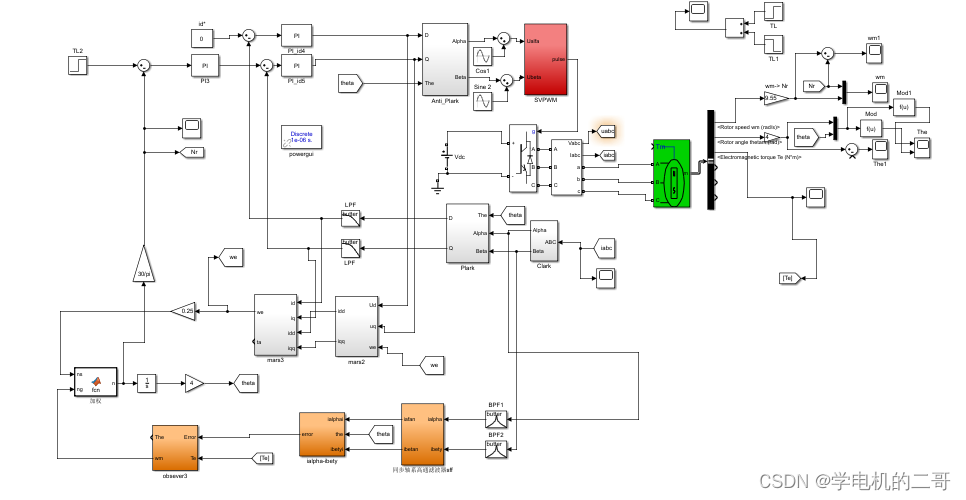
进行测试,低速时用的100,高速时在500,仿真结果如下
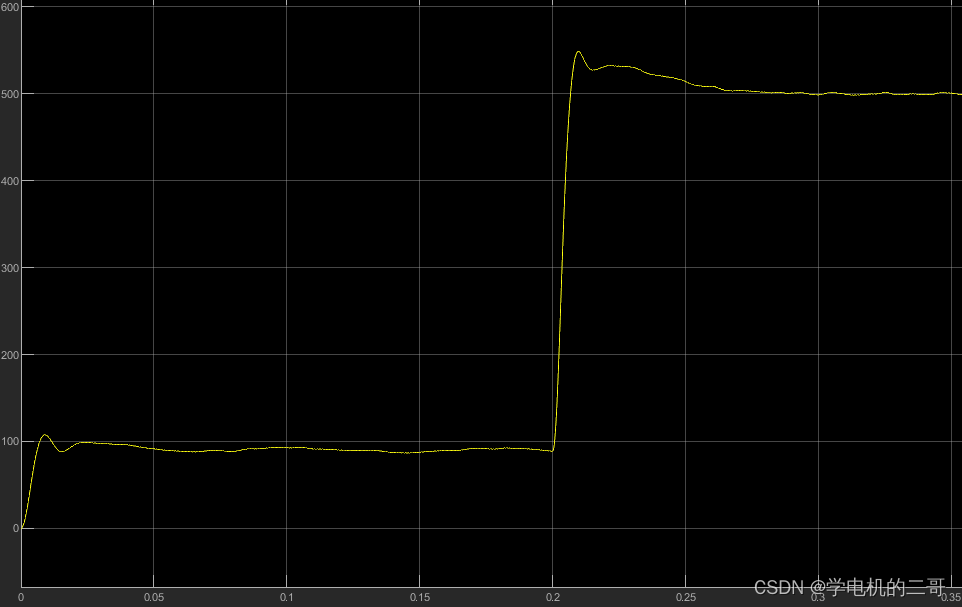
可以看到 这种基于旋转高频电压信号注入法和模型参考 自适应法的转子位置自检测复合方法能够在两种方法之间实现平滑的切换证明了 该方法的可行性。
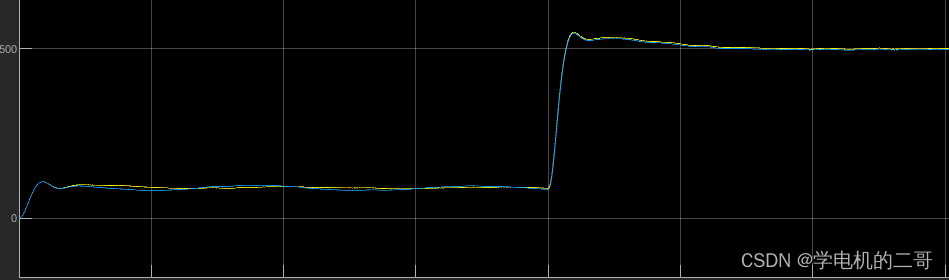
估计转速与实际转速误差也很小
以上就是本次仿真,制作不易,可能模型还有问题,在改进一下会更好。
由于这个模型并不是太完善,想要的可以私聊,我在改进改进
免费哦,!!!!!!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









