






本次根据相关文献,搭建了一个经典的永磁同步电机的无位置传感技术,也是一种MRAS,观测的一种,典型的龙伯格观测器,因为书中没有找到相关模型,在此搭建一个,给后来人带来一个捷径,本模型是龙伯格,加上PLL进行测量,得到位置和角度。
首先看一下观测器的推导,在静止坐标系下的电压方程如下

整理成电流方程如下
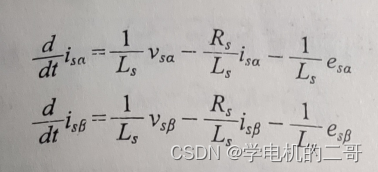
其中,e为反电动势,Ls为定子绕组的电感值,Ls=(Ld+Lq)/2
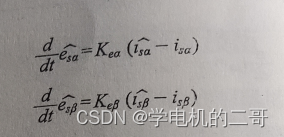
静止坐标系下反电动势可以表达如下

可以看到里面包含转子位置和位置角度的信息,通过PLL锁相环可以得到,根据上述方程,构建龙伯格观测器,如下

其中观测到的反电势设计为下,其中各个参数Ki=Ki
=Ki,Ke
=Ke
=Ke
有了上述方程,就可以构建模型,接下来,就是上模型的环节(很期待吧,好难,搭建了好久,测试了好久,要哭了,,,,,)
首先看一下观测器,
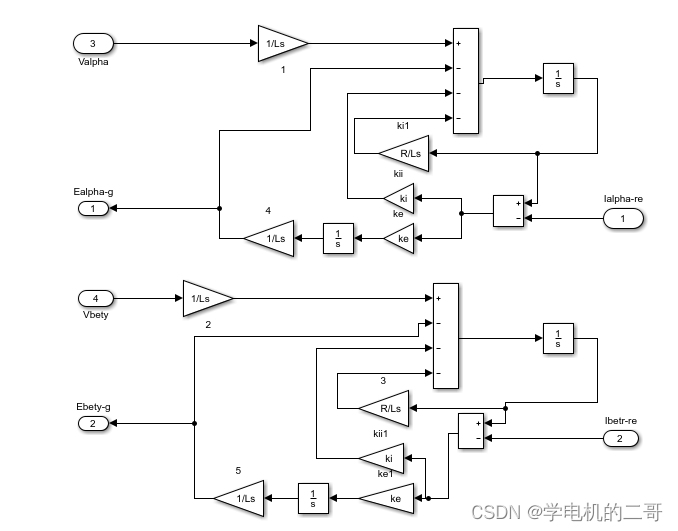
很复杂吧,复杂就对了,搭建好久,给个赞鼓励一下,哈哈,
其中后标为re为真实值,为g的是观测值,搭建好后,别忘记了参数哦,一个Ki,一个Ke
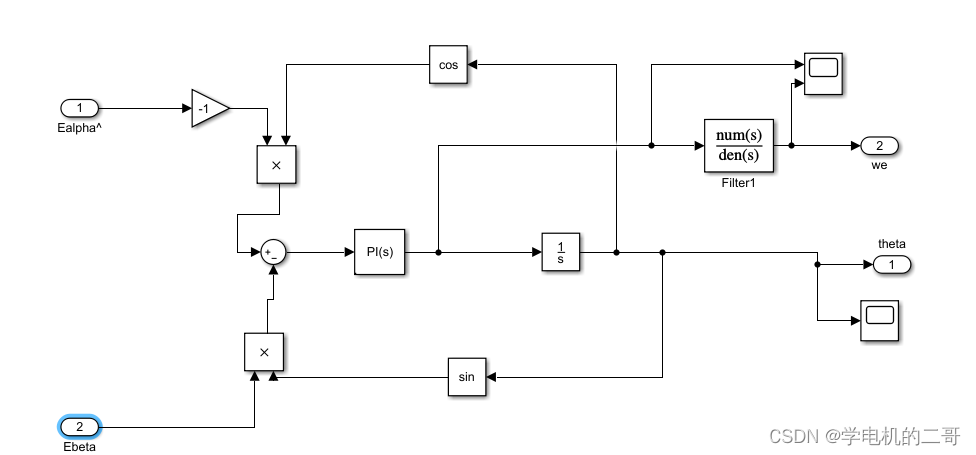
然后是PLL锁相环的搭建,也可以用反正切,大家可以尝试以下,PLL如下
激动的心,颤抖的手,终于完成了,整个模型如下,

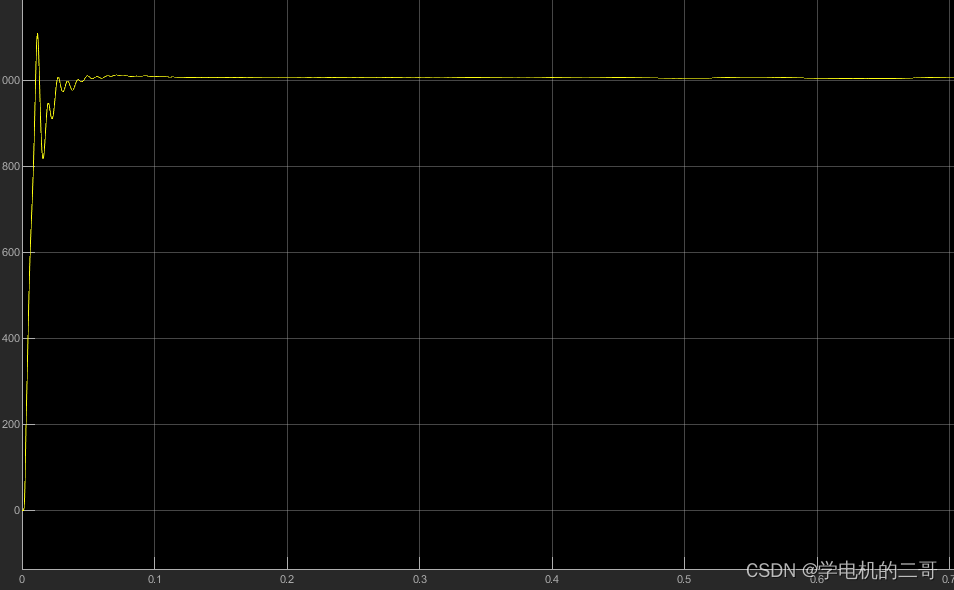
给定速度1000n/min,没有带载,仿真结果如下,还行吧,参数还可以在调调,可能会更好,
博主调了好久,才出来的一个模型,大家可以尝试以下。
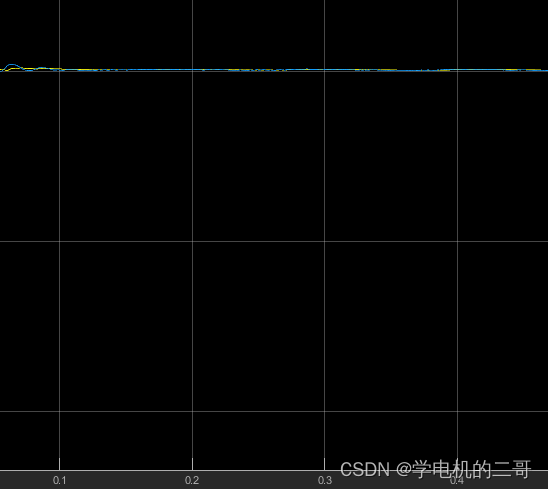
稳定后实际与观测的速度如下,蓝色和黄色基本重合,可见效果挺不错。
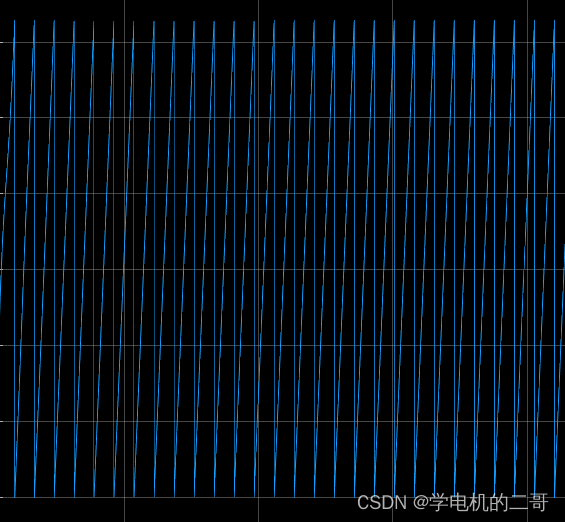
角度误差如下,也整挺好,略略略略
OK,就介绍到这吧,创作不易,点个关注不迷路,哈哈其实无所谓,只是对学习的一个记录过程。
还是老样子,模型私聊回复,免费,免费,免费,重要的事情说三遍!















 306
306











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









