







目录
前言
📅大四是整个大学期间最忙碌的时光,一边要忙着备考或实习为毕业后面临的就业升学做准备,一边要为毕业设计耗费大量精力。近几年各个学校要求的毕设项目越来越难,有不少课题是研究生级别难度的,对本科同学来说是充满挑战。为帮助大家顺利通过和节省时间与精力投入到更重要的就业和考试中去,学长分享优质的选题经验和毕设项目与技术思路。
🚀对毕设有任何疑问都可以问学长哦!
选题指导:
大家好,这里是海浪学长毕设专题,本次分享的课题是
🎯基于深度学习的工程地质勘察现场目标检测系统
设计思路
一、课题背景与意义
工程地质勘察是建筑工程和基础设施建设中的重要环节,关系到项目的安全性和经济性。传统的工程地质勘察方法往往依赖人工观测和经验判断,效率低,且可能存在主观误差,难以满足现代工程对精确性和实时性的要求。通过分析大量地质数据和图像信息,能够自动识别和分类不同的地质特征,从而提高勘察的效率和准确性。实时的地质识别和分析能力,有助于工程项目的动态管理和决策支持,推动工程安全性和经济效益的提升。
二、算法理论原理
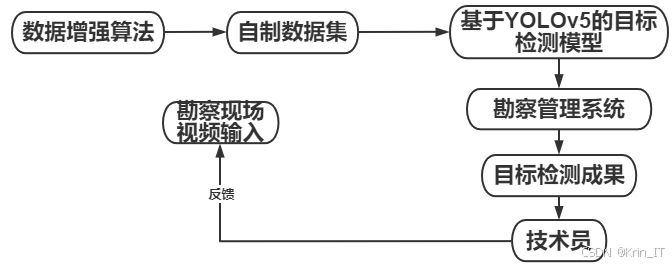
在工程地质勘察中,目标检测系统的有效性对提高勘察效率和准确性至关重要。该系统的运行流程主要包括以下几个步骤:
- 数据增强与训练:利用数据增强算法对自制数据集进行处理。数据增强技术(如旋转、翻转、缩放、颜色变化等)能够有效扩充训练样本的多样性,从而提高模型的泛化能力。增强后的自制数据集随后被用于训练YOLOv5s模型。通过反复训练,模型逐渐学习到钻探现场各预定检测目标(如钻机、岩石、土壤等)的特征,达到能够良好反映现场实际情况的水平。
- 实时检测:在模型训练完成并达到预期的检测性能后,系统可以开始进行实时目标检测。通过输入钻探现场摄像头实时采集的视频或图片,YOLOv5s模型对每一帧图像进行分析,生成检测结果。这些结果包括检测到的目标类别、位置(边界框)以及置信度评分。此步骤的关键在于模型的高效性,能够在短时间内处理大量数据,确保实时反馈。
- 结果分析与反馈:检测结果生成后,系统将对这些结果进行深入分析,提取出与钻机工作状态相关的信息。通过监控检测到的目标状态,系统能够识别出处于异常状态的钻机(如停机、位置偏移、故障等),并及时生成提醒。这种反馈机制不仅能够助力现场操作人员快速采取措施,避免潜在的安全隐患,还能为后续的地质勘察决策提供数据支持。
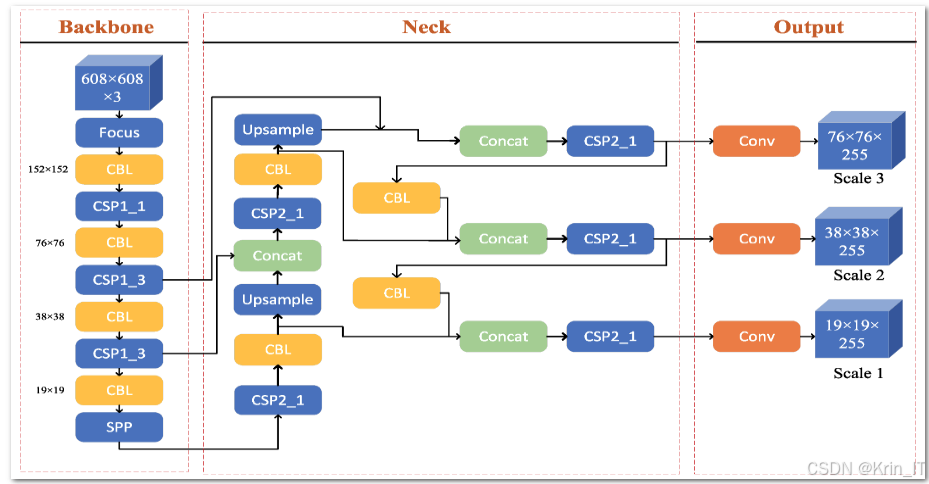
YOLOv5模型主要由四个部分组成,即输入层、Backbone、Neck和输出层,这些部分协同工作,使得目标检测过程更加高效。
- 输入层负责接收原始图像数据。通过调整输入图像的尺寸和格式,确保其符合模型训练和推理的要求。
- Backbone是特征提取的核心部分,YOLOv5采用CSPNet作为其主干网络。该网络通过多层卷积操作,从输入图像中提取出丰富的特征信息,为后续的目标检测提供基础。
- Neck部分旨在增强特征的表达能力,YOLOv5结合了FPN和PAN,有效融合不同层次的特征,提升模型对小目标和复杂背景的检测能力。
- 输出层负责将特征图转化为最终的检测结果。该部分通过Anchor Box机制预测目标的位置、类别和置信度。最终,结合非极大值抑制(NMS)算法,输出最终的目标检测结果。
三、检测的实现
3.1 数据集
在制作工程地质勘察钻探作业现场的数据集时,首先需要进行图像采集。此环节可以选择自主拍摄和互联网采集相结合的方式。自主拍摄通过在实际钻探作业现场使用高分辨率摄像设备拍摄,确保数据的真实性和针对性;而互联网采集则可以利用公开资源和相关数据库,获取多样化的图像资料,以丰富数据集的内容和类型。采用labelme工具进行标注,labelme是一款开源的图像标注工具,能够方便地对图像中的目标进行框选和标记。在标注过程中,研究人员根据钻探作业现场的实际需求,标注出不同类型的目标,如钻机、土壤、岩石等,并为每个目标分配相应的类别标签,以便后续模型训练使用。

为了提高模型的训练效果和泛化能力,数据集被划分为训练集、验证集和测试集,通常采用80%、10%、10%的比例。同时,输入端功能中引入了马赛克数据增强(Mosaic)技术和自适应锚框计算。Mosaic数据增强通过随机选取多幅图像进行拼接,生成新的图像并获得相应的锚定框,从而极大丰富了检测物体的背景。这种方法不仅增加了样本的多样性,还提高了模型在不同背景下目标识别的准确性,为后续的模型训练和评估打下了坚实的基础。
3.2 实验环境搭建
实验的训练环境搭建在NVIDIA GeForce RTX 3080 Ti显卡上,该显卡以其强大的GPU计算能力和高效的深度学习性能,为模型训练提供了坚实的硬件支持。开发语言选择Python,因其丰富的深度学习库和社区支持,使得开发过程更加高效和便捷。为实现目标检测模型的构建和训练,本实验使用了Pytorch框架,Pytorch以其灵活性和易用性而广受欢迎,能够有效地支持模型的快速迭代和实验调试。
3.3 实验及结果分析
在工程地质现场勘探识别系统中,选择YOLOv5系列中的体积最小、部署最灵活的YOLOv5s网络模型。该模型适合在资源有限的设备上运行,同时仍能保持较高的检测精度。为了优化训练过程,我们设置了一系列参数:Batch大小为32,这意味着每次训练中将使用32张图像;动量系数设置为0.937,以帮助模型在训练过程中更好地收敛;权重衰减设为0.005,以防止过拟合;学习率设定为0.01,并采用Warm-up方法进行学习率更新,以便在训练初期逐步增加学习率,帮助模型稳定学习;批尺寸为16,表明在每个训练周期中将使用16个批次进行更新。训练迭代次数设定为1200次,以确保模型能够充分学习到目标的特征。
# YOLOv5s模型参数设置示例
params = {
'batch_size': 32,
'momentum': 0.937,
'weight_decay': 0.005,
'learning_rate': 0.01,
'warmup': True,
'warmup_batches': 16,
'epochs': 1200
}输出端主要包括GIOU_Loss损失函数计算方法。GIOU损失函数通过引入相交尺度的衡量标准,显著提升了目标检测的精度。相比于传统的IOU_Loss,GIOU_Loss能够更好地处理预测框与真实框之间的关系,尤其是在重叠度较低的情况下。通过采用GIOU_Loss作为损失优化目标,模型能够更准确地回归边界框的位置,提高最终检测的准确性。
# GIOU_Loss的计算示例
def giou_loss(pred_boxes, true_boxes):
# 计算GIOU损失的实现代码
pass # 具体实现省略迭代训练后,模型的检测能力得到显著提升,能够对施工现场的多种对象进行识别,包括钻机、工人、钻杆和标贯锤等。模型输出的检测结果包括每个目标的类别、位置(边界框)和置信度评分。
# 模型预测示例
results = model.predict(image)
for result in results:
print(f"Detected {result['class']} at {result['box']} with confidence {result['confidence']}")创作不易,欢迎点赞、关注、收藏。
毕设帮助,疑难解答,欢迎打扰!

















 3184
3184

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









