







 本文介绍了如何将卷积神经网络和目标检测算法应用于解决违规占道经营识别问题,通过集成去雾模块提高图像质量。文章详细阐述了课题背景、算法原理、数据集准备、实验环境设置以及模型训练和评估指标。
本文介绍了如何将卷积神经网络和目标检测算法应用于解决违规占道经营识别问题,通过集成去雾模块提高图像质量。文章详细阐述了课题背景、算法原理、数据集准备、实验环境设置以及模型训练和评估指标。
目录
前言
📅大四是整个大学期间最忙碌的时光,一边要忙着备考或实习为毕业后面临的就业升学做准备,一边要为毕业设计耗费大量精力。近几年各个学校要求的毕设项目越来越难,有不少课题是研究生级别难度的,对本科同学来说是充满挑战。为帮助大家顺利通过和节省时间与精力投入到更重要的就业和考试中去,学长分享优质的选题经验和毕设项目与技术思路。
🚀对毕设有任何疑问都可以问学长哦!
选题指导:
大家好,这里是海浪学长毕设专题,本次分享的课题是
🎯集成去雾模块的违规占道经营识别系统
设计思路
一、课题背景与意义
违规占道经营是城市管理中的常见问题,给交通秩序和市容形象带来了诸多困扰。传统的违规占道经营识别系统在雾霾天气下往往受到雾霾影响,导致图像质量下降,影响识别效果。因此,将去雾模块集成到识别系统中,可以提高图像质量,减少雾霾对识别结果的干扰,提高识别准确率和效果。
二、算法理论原理
2.1 卷积神经网络
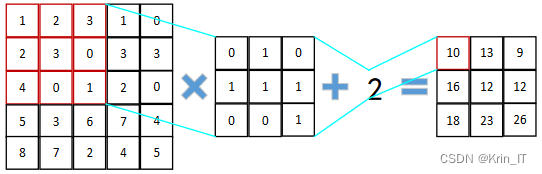
卷积神经网络(CNN)是一种前馈神经网络,被广泛应用于深度学习中,并为人工智能的发展提供了强大的支持。它通过叠加若干个卷积层、池化层和全连接层等构建一个完整的网络结构,用于图像处理、计算机视觉和模式识别等任务。卷积神经网络的核心思想是对输入图像进行特征提取,逐步生成深层特征以及位置信息,并通过分类器进行图像分类。网络的基本结构可以分为两个主要部分:特征提取器和分类器。特征提取器是卷积神经网络中的核心组件,它包含了若干个卷积层和池化层。卷积层通过应用卷积操作,利用一组可学习的滤波器对输入图像进行滤波,从而提取出不同的特征。这些特征可以是边缘、纹理或更高级的语义特征,通过不断堆叠和学习更多的卷积层,网络可以逐渐提取出更加抽象和高级的特征。

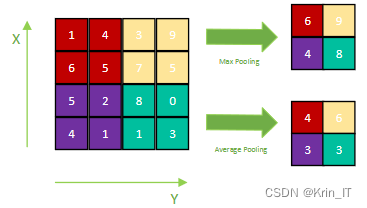
池化层则用于减小特征图的空间尺寸,同时保留重要的特征信息。常用的池化操作包括最大池化和平均池化,它们通过在每个池化窗口中选择最大或平均的值来降低特征图的维度,从而减少计算复杂度并提高模型的鲁棒性。在特征提取器之后是分类器,它通常由若干个全连接层组成。全连接层将特征映射到输出类别的概率分布,通过学习权重和偏置参数来实现分类任务。通过将特征提取器和分类器结合在一起,卷积神经网络可以在图像处理和分类任务中取得出色的表现。它能够自动学习图像中的特征,并具备平移不变性和局部感知性,使其在处理大规模图像数据时具有较强的适应性和泛化能力。
激活函数(Activation Function)在神经网络中起着非常重要的作用。由于神经网络的输入和输出之间存在线性关系,如果没有激活函数的引入,网络的表达能力将受限,导致泛化性能较差。因此,通过引入非线性的激活函数,可以将神经元的输入和输出进行变换,使得神经网络可以学习和表示更深层次的特征,从而提高模型的表达能力。
在卷积神经网络中,为了控制参数的数量和计算的复杂性,池化层被引入来减小特征图的维度。池化层通常位于两个卷积层之间,通过降采样操作可以增大感受野,并减少数据的空间尺寸,从而加快计算速度。常见的池化操作有平均池化和最大池化。平均池化将池化窗口内的数值进行平均,而最大池化则选择池化窗口内的最大值作为输出。池化操作能够帮助模型更关注目标特征和其他特征的相对信息,从而控制过拟合现象的发生。
全连接层在卷积神经网络中充当分类器的角色,将经过卷积和池化计算后得到的特征图信息整合并与标记信息对比,以得到最终的分类结果。它具有大量的参数,可以学习输入特征与输出类别之间的复杂关系。
2.2 目标检测算法
为了实现目标检测,One-Stage算法通常采用锚框(Anchor Boxes)机制。锚框是一系列预定义的框,具有不同的尺度和长宽比,被用来表示不同大小和形状的目标。通过在输入图像上生成密集的锚框,并利用分类器进行目标分类和回归器进行位置调整,算法能够有效地捕捉目标的多样性,并进行准确的定位和分类。One-Stage算法还广泛采用了特征金字塔(Feature Pyramid)的思想来处理尺度变化。通过在网络中引入多层特征金字塔,可以在不同层次上检测和识别不同尺度的目标,从而提高算法对尺度变化的适应能力。
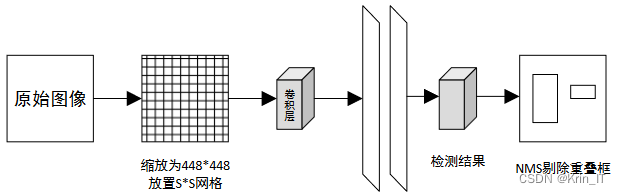
One-Stage算法具有许多优点。首先,它们设计简单,整个检测过程可以在一个网络中完成,减少了额外的计算和复杂性。其次,由于无需生成候选区域,这类算法在速度方面表现出色,适用于对实时性要求较高的应用场景。此外,One-Stage算法在小目标检测上也具有一定的优势,能够有效地处理小尺度目标的定位和分类。
三、检测的实现
3.1 数据集
由于网络上没有现有的合适的数据集,我决定进行网络爬取,收集了大量的违规占道经营相关图像,并制作了一个全新的数据集。这个数据集包含了各种真实场景下的违规占道经营照片,其中包括违规占道行为、道路交通状况等。通过网络爬取和数据整理,我能够获取真实的违规占道经营图像。通过引入其他公开的违规占道经营图像数据和相关交通数据,我扩展了数据集中的图像和环境信息,使得系统能够更好地应对各种场景和情况。此外,我还进行了数据标注工作,将每张图像中的违规占道经营区域进行了标记,以便系统能够准确地进行识别和分类。

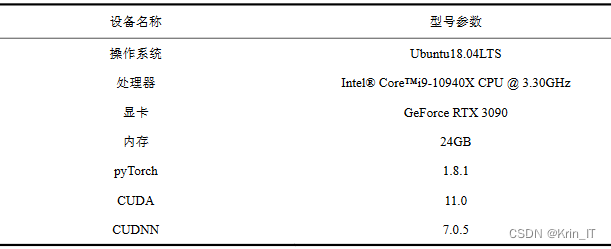
3.2 实验环境搭建
3.3 实验及结果分析
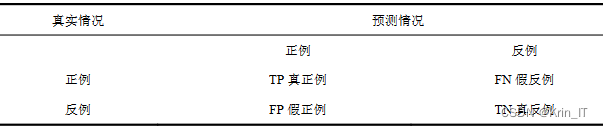
目标检测模型评价指标主要包括精确率(Precision)、召回率(Recall)、平均准确率(AP)和平均准确率均值(mAP)。通过分析混淆矩阵,可以得出计算这些指标的方法。真正例(True Positives)表示被模型预测正确的正样本,假正例(False Positives)表示被模型错误地预测为正样本,假反例(False Negatives)表示被模型错误地预测为负样本,真反例(True Negatives)表示被模型正确地预测为负样本。
去雾模型评价指标主要使用峰值信噪比(PSNR)和结构相似性(SSIM)来评估模型去雾的质量。PSNR是衡量重建图像与原始图像之间噪声的比值,数值越高表示图像质量越好。SSIM通过比较图像的亮度、对比度和结构信息,计算它们之间的相似性,数值在0到1之间,越接近1表示图像质量越高。
相关代码示例:
import numpy as np
import tensorflow as tf
class OneStageDetector:
def __init__(self, num_classes):
self.num_classes = num_classes
self.model = self.build_model()
def build_model(self):
inputs = tf.keras.Input(shape=(224, 224, 3))
# Define the model structure
# ...
model = tf.keras.Model(inputs=inputs, outputs=outputs)
return model
def train(self, train_data, train_labels):
# Implement the training process
# ...
self.model.fit(train_data, train_labels, epochs=10)
def predict(self, test_data):
predictions = self.model.predict(test_data)
# Perform post-processing and parsing of the predictions
# ...
return predictions
model = OneStageDetector(num_classes=10)
train_data = np.random.random((100, 224, 224, 3))
train_labels = np.random.random((100, 10))
model.train(train_data, train_labels)
test_data = np.random.random((10, 224, 224, 3))
predictions = model.predict(test_data)实现效果图样例:




创作不易,欢迎点赞、关注、收藏。
毕设帮助,疑难解答,欢迎打扰!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









