







目录
前言
📅大四是整个大学期间最忙碌的时光,一边要忙着备考或实习为毕业后面临的就业升学做准备,一边要为毕业设计耗费大量精力。近几年各个学校要求的毕设项目越来越难,有不少课题是研究生级别难度的,对本科同学来说是充满挑战。为帮助大家顺利通过和节省时间与精力投入到更重要的就业和考试中去,学长分享优质的选题经验和毕设项目与技术思路。
🚀对毕设有任何疑问都可以问学长哦!
选题指导:
大家好,这里是海浪学长毕设专题,本次分享的课题是
🎯基于改进暗通道先验的雾霾图像去除方法
设计思路
一、课题背景与意义
雾霾是当今社会面临的严重环境问题之一,对人类的健康和生活造成了严重影响。在图像处理领域,雾霾图像的去除一直是一个具有挑战性的问题。传统的雾霾去除方法往往存在去雾效果不佳、处理速度慢等问题。通过对雾霾图像中的暗通道进行先验估计,并结合图像的全局统计信息和局部特征,实现高质量的雾霾图像去除,提升图像质量,为相关领域的研究和应用提供有力支持。
二、算法理论原理
2.1 边缘检测
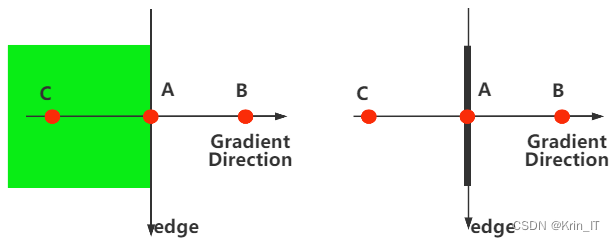
Canny算子是一种经典的边缘检测算法,用于在图像中准确地检测边缘线。它通过应用高斯滤波器来减少噪声,计算图像的梯度幅值和方向,并进行非极大值抑制和双阈值处理来提取边缘。Canny算子具有抗噪声能力强、边缘细化效果好和边缘连接能力强的优点。Canny算子的主要目标是检测图像中的强边缘,并尽可能减少噪声和误检测。它的算法流程可以简要概括为以下几个步骤:
- 噪声抑制:通过应用高斯滤波器对图像进行平滑处理,以减少噪声的影响。高斯滤波可以使图像变得平滑,但仍保留边缘的重要信息。
- 计算梯度:利用梯度算子(如Sobel算子)计算图像的梯度幅值和方向。梯度幅值表示像素强度变化的大小,而梯度方向表示变化的方向。
- 非极大值抑制:在梯度方向上进行非极大值抑制,以细化边缘并消除边缘响应的非最大值点。这一步骤有助于获得细化的边缘线。
- 双阈值处理:根据预先定义的高阈值和低阈值,对非极大值抑制后的梯度幅值进行阈值化处理。高于高阈值的像素点被认为是强边缘,低于低阈值的像素点被认为是弱边缘,介于两者之间的像素点被视为可能的边缘。
- 边缘连接:根据强边缘和与之相连的弱边缘,通过连接边缘像素点来形成完整的边缘线。这可以通过使用连接性分析(如连通区域分析)或边缘跟踪算法(如基于梯度方向的边缘跟踪)来实现。
通过使用Canny算子进行边缘检测,可以获取天空区域和非天空区域之间的边缘线。将包含天空和非天空区域的图像进行读取,并将其转换为灰度图像。接下来,应用高斯滤波对图像进行平滑处理,以减少噪声的影响。使用Canny算子进行边缘检测。通过调整Canny算子的阈值参数,可以控制检测到的边缘线的数量和质量。适当的阈值选择对于获取准确的边缘非常重要。在得到边缘检测结果后,需要区分天空和非天空的边缘线。这可以通过分析图像的特征进行实现,例如利用颜色特征或者采用图像分割或区域检测算法。根据具体需求和图像特点,选择合适的方法来区分天空和非天空区域的边缘。将区分好的天空和非天空边缘线绘制在原始图像上,以便进行可视化或进一步的分析。这可以使用图形库(如OpenCV)来实现。
2.2 图像去雾
暗通道先验算法基于一个观察:大多数自然图像中的绝大部分区域,在至少一个颜色通道上,都会存在一个非常低的像素值。这个低值区域被称为"暗通道",它通常对应着天空、阴影或者其他透明对象。算法的核心思想是,通过寻找图像的暗通道来估计雾的浓度,从而实现图像的去雾。具体步骤如下:对输入的彩色图像,对每个局部窗口内的最小像素值进行计算,得到一个灰度图像,即暗通道图像。在暗通道图像中,较亮的像素通常对应着大气光的亮度。因此,在整个图像中选择亮度最高的像素作为估计的大气光值。使用估计的大气光值,计算每个像素的透射率,作为衡量雾浓度的指标。透射率与像素值和大气光之间的关系具有一定的数学表达式。通过对原始图像进行全局调整,校正透射率的影响,得到去除雾霾的场景亮度。将估计的场景亮度与原始图像的颜色进行组合,得到最终去雾后的图像。
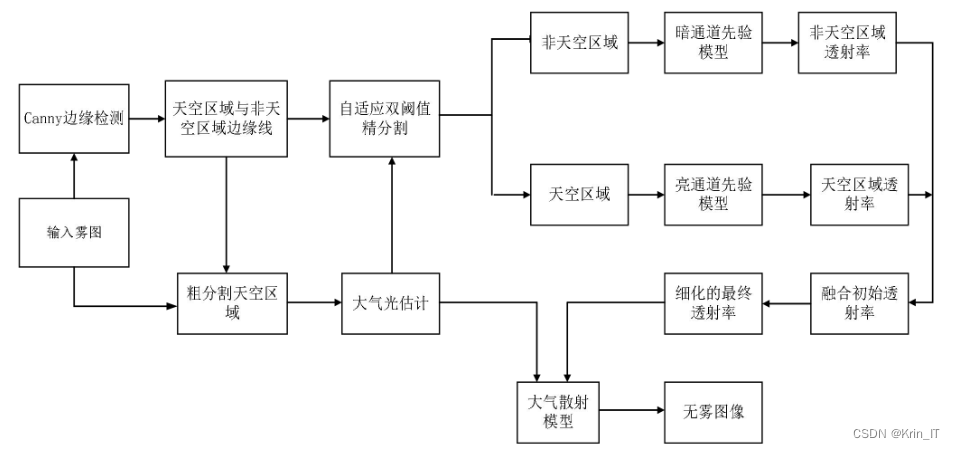
改进的暗通道先验算法针对天空区域分割和透射率估计的不准确性问题,提出了一种综合的解决方案。该算法首先利用Canny边缘检测算子获取天空与非天空区域的边缘线,然后根据这些边缘线粗略地分割出雾图中的天空区域,并估计大气光值。接下来,通过自适应双阈值分割方法在精细化分割过程中利用已获取的边缘线和大气光,准确地分割出天空区域。针对天空区域,提出了基于亮通道先验的透射率估计方法,而对于非天空区域则继续使用暗通道先验模型进行透射率估计,最后将不同区域的初始透射率进行线性叠加得到初始透射率值。为了进一步提高估计的精度,算法引入了快速引导滤波器来细化融合后的初始透射率,并基于大气散射模型完成图像的恢复。这一综合改进方案有效地解决了天空区域分割和透射率估计的问题,从而提升了去雾效果,使得算法在图像去雾领域具备更好的应用潜力。
三、检测的实现
3.1 数据集
由于网络上没有现有的合适的数据集,我决定进行网络爬取,收集了大量的雾霾图像,并制作了一个全新的数据集。这个数据集包含了各种真实世界的雾霾场景照片,其中包括不同程度的雾霾强度和多样的环境条件。通过网络爬取和数据整理,我能够获取真实的雾霾图像。通过引入其他公开的雾霾图像数据和相关气象数据,我扩展了数据集中的雾霾图像和环境信息,使得算法能够更好地适应不同的场景和条件。此外,为了确保数据集的质量和可用性,进行了数据标注。

3.2 实验环境
实验环境使用Windows操作系统,并利用Python作为主要的编程语言进行算法和模型的实现。使用PyTorch作为深度学习框架,构建和训练神经网络模型。借助Pandas等库,完成数据的加载、处理和转换。这样的实验环境提供了一个方便和高效的平台,用于开发和测试算法系统。
3.3 模型训练
雾霾图像去除方法的设计思路如下:
- 引入暗通道先验模型:首先,我们引入了暗通道先验模型作为基础。该模型认为在雾霾图像中,非天空区域的像素在至少一个颜色通道上具有较低的值。这个先验假设为后续的改进方法提供了基础。
- 自适应天空区域分割:为了提高大气光值的估计准确性,并解决现有方法在非天空区域存在高亮像素时的错误估计问题,我们采用了自适应天空区域分割方法。首先,利用Canny算子提取天空和非天空区域的边缘线。然后,通过形态学闭运算和最大连通域滤除算法得到完整的边缘线,并将其应用于粗分割天空区域。接着,我们选择粗分割天空区域中亮度较高的前10%像素的中值作为大气光的估计值,以提高估计的准确性。
- 自适应双阈值分割:基于得到的边缘线和大气光值,我们设计了一种自适应双阈值分割方法,以精细地分割雾霾图像中的天空区域。其中,上限阈值分割采用边界替代法细化的大气光-暗原色(IDrA)分割,下限阈值分割采用SV分割。为了解决现有去雾算法处理图像中天空区域时出现失真的问题,我们提出了基于亮通道先验的透射率估计方法,使天空区域采用亮通道先验模型来估计透射率值,而非天空区域则采用暗通道先验模型进行估计。
- 透射率边缘细化及图像复原:为了进一步优化透射率的估计结果,我们引入了快速引导滤波器对融合后的透射率进行边缘细化。最后,基于大气散射模型,我们完成了雾霾图像的复原过程。
相关代码示例:
def haze_removal(image):
edges = cv2.Canny(image, 50, 150)
sky_mask = cv2.dilate(edges, None)
atmosphere = np.percentile(image[sky_mask], 90)
dark_channel = get_dark_channel(image)
transmission = estimate_transmission(image, dark_channel, atmosphere)
refined_transmission = guided_filter(image, transmission)
restored_image = restore_image(image, refined_transmission, atmosphere)
return restored_image
def get_dark_channel(image, patch_size=15):
min_channel = np.min(image, axis=2)
dark_channel = cv2.erode(min_channel, cv2.getStructuringElement(cv2.MORPH_RECT, (patch_size, patch_size)))
return dark_channel
def estimate_transmission(image, dark_channel, atmosphere, omega=0.95, t0=0.1):
transmission = 1 - omega * dark_channel / atmosphere
transmission = np.maximum(transmission, t0)
return transmission
def guided_filter(image, transmission, radius=40, epsilon=1e-3):
mean_image = cv2.boxFilter(image, cv2.CV_64F, (radius, radius))
mean_transmission = cv2.boxFilter(transmission, cv2.CV_64F, (radius, radius))
mean_image_transmission = cv2.boxFilter(image * transmission, cv2.CV_64F, (radius, radius))
covariance = mean_image_transmission - mean_image * mean_transmission
mean_covariance = cv2.boxFilter(covariance, cv2.CV_64F, (radius, radius))
mean_variance = cv2.boxFilter(transmission * transmission, cv2.CV_64F, (radius, radius))
a = mean_covariance / (mean_variance + epsilon)
b = mean_transmission - a * mean_image
mean_a = cv2.boxFilter(a, cv2.CV_64F, (radius, radius))
mean_b = cv2.boxFilter(b, cv2.CV_64F, (radius, radius))
refined_transmission = mean_a * image + mean_b
return refined_transmission实现效果图样例:


创作不易,欢迎点赞、关注、收藏。
毕设帮助,疑难解答,欢迎打扰!















 2048
2048











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









