






 本文介绍了非线性规划模型的基本概念,包括数学形式、线性与非线性方程的区别,以及全局最优解和局部最优解的定义。着重讨论了无约束和有约束规划问题的求解策略,以平板电视生产利润函数为例,展示了梯度下降算法在实际问题中的应用。最后给出了梯度下降算法的理论基础和具体实例,包括二维和一维函数的极值求解。
本文介绍了非线性规划模型的基本概念,包括数学形式、线性与非线性方程的区别,以及全局最优解和局部最优解的定义。着重讨论了无约束和有约束规划问题的求解策略,以平板电视生产利润函数为例,展示了梯度下降算法在实际问题中的应用。最后给出了梯度下降算法的理论基础和具体实例,包括二维和一维函数的极值求解。
目录
例题:求函数在区间[a,b]且在x0附近的极值(二维函数求极值)
例题:求函数在区间[a,b]且在x0附近的极值(一维函数求极值)
1. 非线性规划模型
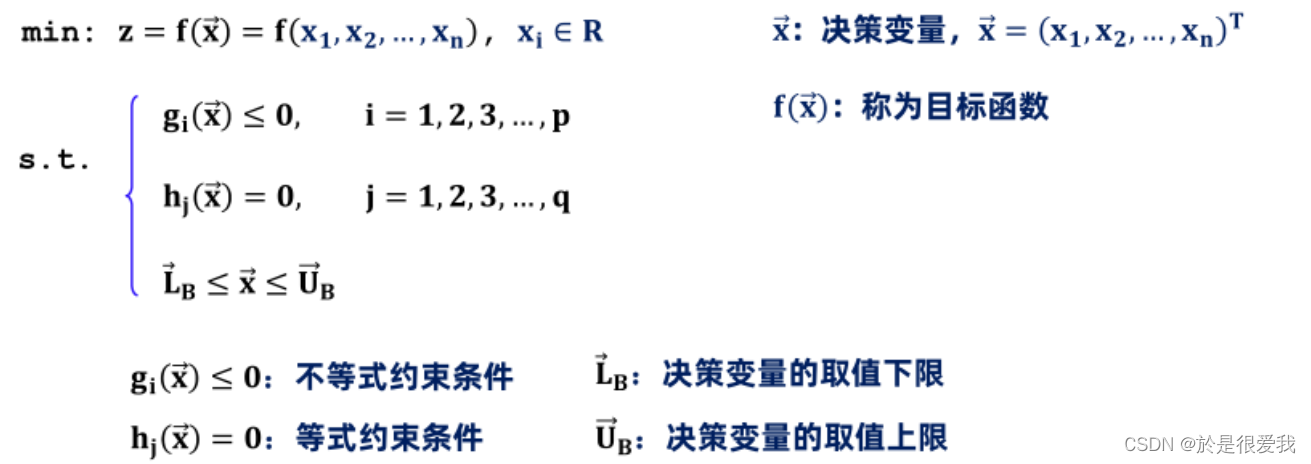
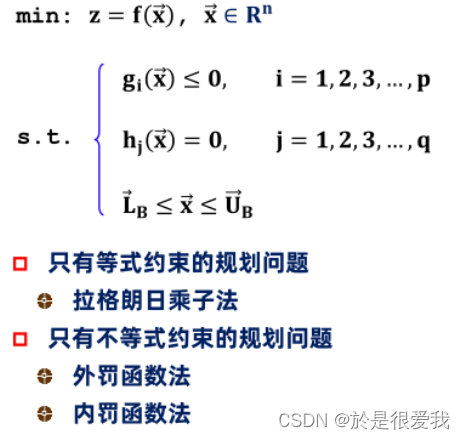
非线性规划的数学形式(1)
其中,或者是
中至少有一个为非线性方程,则称该模型为非线性规划模型
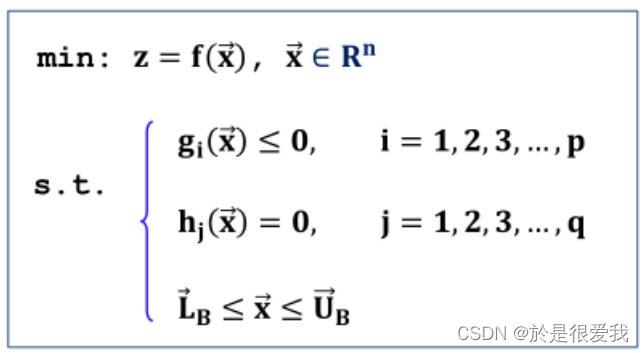
非线性规划的数学形式(2):采用向量表示

非线性规划的数学形式(3):将线性约束与非线性约束分离

关于线性方程和非线性方程
在线性代数中,线性方程和非线性方程是描述数学关系的两种不同类型的方程。
1. 线性方程:
- 线性方程是指其未知数的最高次数为一次的方程。例如,形如 ax + b = 0 的一元线性方程,或形如 ax + by = c 的二元线性方程。
- 线性方程的特点是未知数的次数都是一次,且各个未知数之间没有乘积项或其他非线性项。
2. 非线性方程:
- 非线性方程是指其未知数的最高次数不为一次的方程。这意味着方程中可能包含平方项、立方项、乘积项或其他非线性项。
- 例如,x^2 + y^2 = r^2 是一个二元的非线性方程,e^x - 2y = 0 是一个一元的非线性方程。
3. 区别:
- 主要区别在于方程中未知数的次数。线性方程中未知数的次数都是一次,而非线性方程中未知数的次数可以是二次、三次或更高次。
- 线性方程的图像通常是直线(或平面),而非线性方程的图像则可能是曲线、曲面或其他形状。
- 求解线性方程通常更为直接,可以使用代数方法解析求解,例如消元法、逆矩阵法等。而非线性方程的求解通常更为复杂,可能需要数值方法或近似求解。
2. 非线性规划模型的概念和理论
对于如下模型:
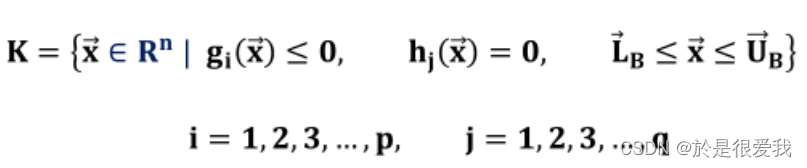
非线性规划问题的可行域
全局最优解和局部最优解
- 若
,且
,都有
,则称
为该规划问题全局最优解,
为全局最优值。
- 若
,且存在的邻域
,且
,有
无约束规划问题的求解
无约束规划的数学形式
定理:无约束规划问题局部最优解的充分条件:设 具有连续二阶偏导数,且
满足
并且
为正定矩阵,则
是无约束问题的局部极小点
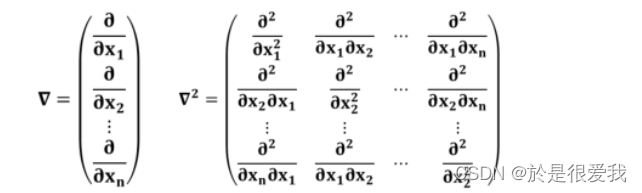
表示函数的
的梯度(一阶偏导数向量)。
表示函数的
有约束规划问题的求解
有约束规划问题的求解的一般思路
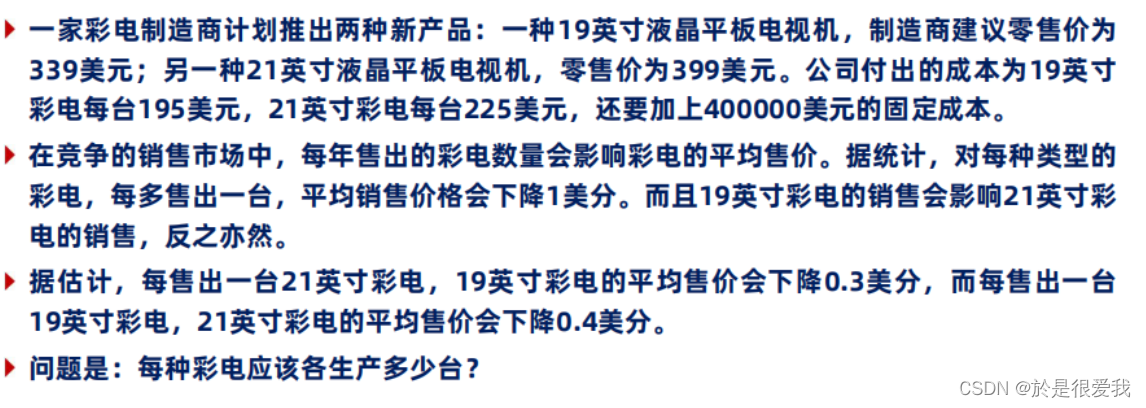
3. 非线性规划问题
-
问题描述
-
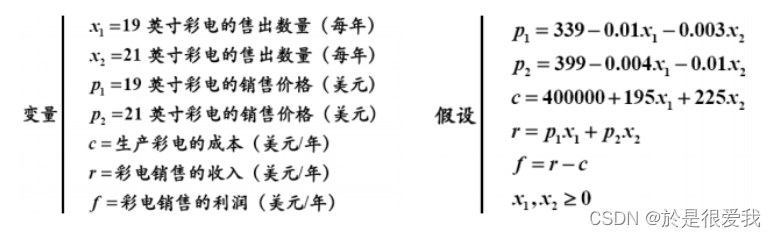
问题分析与模型建立
设两种型号平板电视的产量为决策变量,列出利润函数,求利润函数的最值
列式求出利润函数的值

模型建立
f(x1,x2)作为求最大值的目标函数,x1、x2作为决策变量,可以将问题转换为在区域 内求函数f(x1,x2)的最值
根据函数进行绘图
在这段代码中,通过以下语句设置了变量的取值范围和步长:
x1 = 0:100:10000;
x2 = 0:100:10000;
这里使用了 MATLAB 中的冒号操作符来定义向量。冒号操作符的一般形式是 `start:step:end`,其中 `start` 是起始值,`step` 是步长,`end` 是结束值。在这个例子中,`x1` 和 `x2` 都从0开始,步长为100,直到10000结束。这意味着 `x1` 和 `x2` 的取值范围是从0到10000,且每次递增100。
clc,clear,format long g % 设置显示格式为 long g,以便显示更多小数位
% 设置变量的取值范围和步长
x1 = 0:100:10000;
x2 = 0:100:10000;
% 生成 x1 和 x2 的网格
[x1,x2] = meshgrid(x1,x2);
% 计算利润函数
c = 400000 + 195 * x1 + 225 * x2;
p1 = 339 - 0.01 * x1 - 0.003 * x2;
p2 = 399 - 0.004 * x1 - 0.01 * x2;
f = p1 .* x1 + p2 .* x2 - c;
% 绘制利润函数的三维网格图
figure(1)
mesh(x1,x2,f);
% 设置 xy 轴标签,使用 LaTeX 解释器
xlabel('$x_1$','Interpreter','Latex')
ylabel('$x_2$','Interpreter','Latex')
zlabel('profit')
figure(2)
contour(x1,x2,f,20,'color','b','ShowText','on');% 20 条等高线,蓝色显示,并显示数字标签
xlabel('$x_1$','Interpreter','Latex')
ylabel('$x_2$','Interpreter','Latex')理论求解(求导)

- 这家公司可以通过生产4735台19英寸彩电和7043台21英寸彩电来获得大利润,每年获得的净利润为553641.025美元。
- 每台19英寸彩电的平均售价为270.52元,每台21英寸彩电的平均售价为309.63元。生产的总支出为2908000元,相应的利润率为19%。
梯度下降算法
1. 基本理论
梯度下降算法是无监督机器学习中的常用算法,通过不断迭代计算函数的梯度,判断该点的某一方向和目标之间的距离,最终求得最小的损失函数



ppt写的很杂,可以看我前面的链接视频比较好理解一些。我在这里只做简单的总结
梯度算法是一种常用的优化算法,用于求解函数的最小值或最大值。它基于函数的梯度(或者梯度的反方向)指示了函数增长最快的方向。梯度算法的基本思想是沿着梯度的反方向(或者梯度的负方向)迭代地调整参数,以期望能够逐步接近函数的最小值点。
梯度算法的基本步骤:
- 定义代价函数
- 选择起始点
- 计算梯度
- 按学习率前进
- 重复3、4步直到找到最低点
2. 梯度下降算法举例
例题:求函数在区间[a,b]且在x0附近的极值(二维函数求极值)
求函数f(x1,x2) = (x1 - 1.0012) + (x2 - 1.9321) + 2.331 在实数域内的极值
先绘制一下均方误差的最小化损失函数的图像:
clc;clear;
% 定义 x1 和 x2 的取值范围和步长
x1 = -5:0.1:5;
x2 = -5:0.1:5;
% 生成 x1 和 x2 的网格
[x1,x2] = meshgrid(x1,x2);
% 计算函数值
y = LossFun(x1,x2);
% 创建新图形窗口
fig1 = figure(1);
% 绘制函数的三维网格图
s = mesh(x1,x2,y);
xlabel('x1');
ylabel('x2');
% 定义函数 LossFun,用于计算函数值
function y = LossFun(x1,x2)
y = (x1 - 1.0012).^2 + (x2 - 1.9321).^2 + 2.331;
end
定义所需函数:
% 定义主函数
% 初始点的x1和x2值('x10'和'x20')、学习率'alpha'、停止条件'tol'和最大迭代次数'maxIter'
% 函数返回最小值点'x1min' 和 'x2min',以及函数的最小值'fmin'和路径'Path'
function [x1min,x2min,fmin,Path] = gradientDescent(x10,x20,alpha,tol,maxIter)
% 设置初始点
x1 = x10; x2 = x20;
% 初始化路径矩阵 Path,将初始点和对应的函数值存储在其中。
Path(1,1) = x1; Path(2,1) = x2;
Path(3,1) = LossFun(x1,x2);
for iter = 1:maxIter % 迭代过程,迭代次数不超过最大迭代次数
% 计算当前点梯度值
grandValueX1 = GradFunX1(x1);
grandValueX2 = GradFunX2(x2);
% 根据梯度和学习率更新当前点的值
x1 = x1 - alpha * grandValueX1;
x2 = x2 - alpha * grandValueX2;
% 将更新后的点和对应的函数值添加到路径矩阵 Path 中。
Path = [Path,[x1;x2;LossFun(x1,x2)]];
% 检查梯度的范数是否小于设定的停止条件 tol,如果是,则跳出迭代循环。
if sqrt(abs(grandValueX1) + abs(grandValueX2)) < tol
break;
end
end
% 计算最终函数值
fmin = LossFun(x1,x2);
% 返回最小值点和函数值
x1min = x1; x2min = x2;
end
% 定义了目标函数 LossFun(x1, x2),即要最小化的函数。
function y = LossFun(x1,x2)
y = (x1 - 1.0012).^2 + (x2 - 1.9321).^2 + 2.331;
end
% 定义了分别关于变量 x1 和 x2 的梯度函数。
function g = GradFunX1(x1)
g = 2.*(x1-1.0012);
end
function g = GradFunX2(x2)
g = 2.*(x2-1.9321);
end使用梯度算法求解
clc;clear;
x10 = -5; x20 = -5; % 初始点
alpha = 0.2;% 学习率(步长)
tol = 1e-6; % 收敛阈值
maxIter = 100000; %最大迭代次数
% 执行梯度下降
[x1min,x2min,fmin,Path] = gradientDescent(x10,x20,alpha,tol,maxIter);
% 绘制下降搜索路径
s = plot(Path(1,:),Path(2,:),'LineWidth',3);
x1min,x2min % 显示极值点例题:求函数在区间[a,b]且在x0附近的极值(一维函数求极值)
求函数f(t) = [cos(0.1 * t) - 1]( t - 2 ) 在区间[0, 200]的极值
函数图像:
clc;clear all;
% 定义函数
textFun = @(t)(cos(0.1*t)-1).*(t-2);
% 生成t向量,范围为0-200,共500个点
t = linspace(0,200,500);
% 计算函数在时间t上的取值
y = textFun(t);
% 绘制图像
plot(t,y,'Color','r','LineWidth',2);
xlabel('t')
ylabel('f(t)')
grid on % 打开网格线 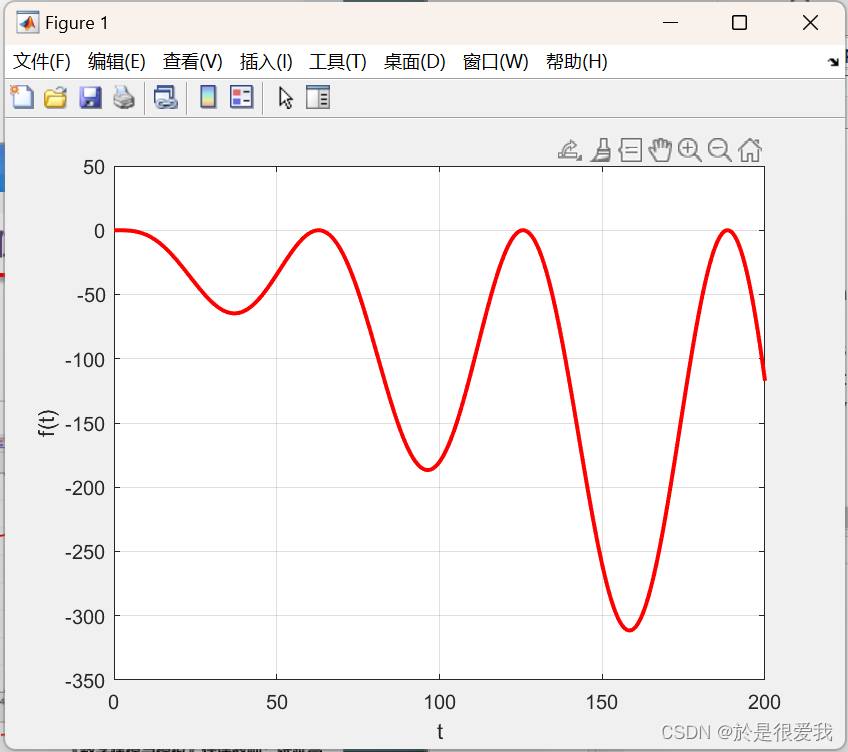
clc;clear all;
% 定义函数
textFun = @(t)(cos(0.1*t)-1).*(t-2);
t0 = 100;% 初始点
alpha = 0.01;% 学习率
MaxIter = 1000; % 最大迭代次数
tol = 1e-6;% 容差
t = t0;
for iter = 1 : MaxIter
gradient = GradDistance(t);
newt = t - alpha * gradient;
if abs(newt - t) < tol
break;
end
t = newt;
end
fprintf('极值点: t = %.4f\n', t);
fprintf('极值: %.4f\n', textFun(t));
% 定义梯度函数
function grad = GradDistance(t)
grad = -0.1 * sin(0.1 * t) * (t - 2) + (cos(0.1 * t) - 1);
end














 1476
1476











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









