






知乎:https://zhuanlan.zhihu.com/p/720966722
RM论坛:https://bbs.robomaster.com/article/49254
这里引用b站王草凡大佬分享的配置教程,成功在达妙开发板上完成了接收大疆DT7遥控器数据的配置,在这里开源给大家
DBUS 协议介绍
遥控器和 stm32 之间采用 DBUS 协议进行通讯。DBUS 通讯协议和串口类似,DBUS 的传输速率为 100k bit/s,数据长度为 8 位,奇偶校验位为偶校验,结束位 1 位。需要注意的是DBUS 使用的电平标准和串口是相反的,在 DBUS 协议中高电平表示 0,低电平表示 1,如果使用串口进行接收需要在接收电路上添加一个反相器。
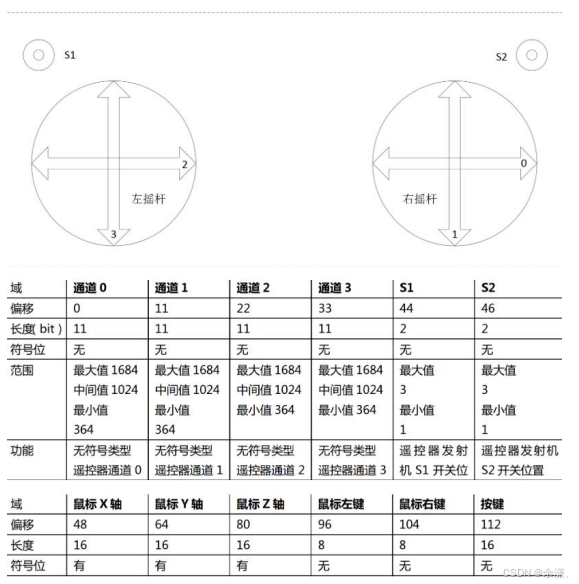
使用 DBUS 接收遥控器的数据,一帧数据的长度为 18 字节,一共 144 位,根据遥控器的说明书可以查出各段数据的含义,从而进行数据拼接,完成遥控器的解码,如图所示。
通过网盘分享的文件:达妙+DT7遥控器.zip
链接: https://pan.baidu.com/s/1tANAhscPuEGOXoHBMvJ9kQ?pwd=evdv 提取码: evdv

















 5461
5461

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









