






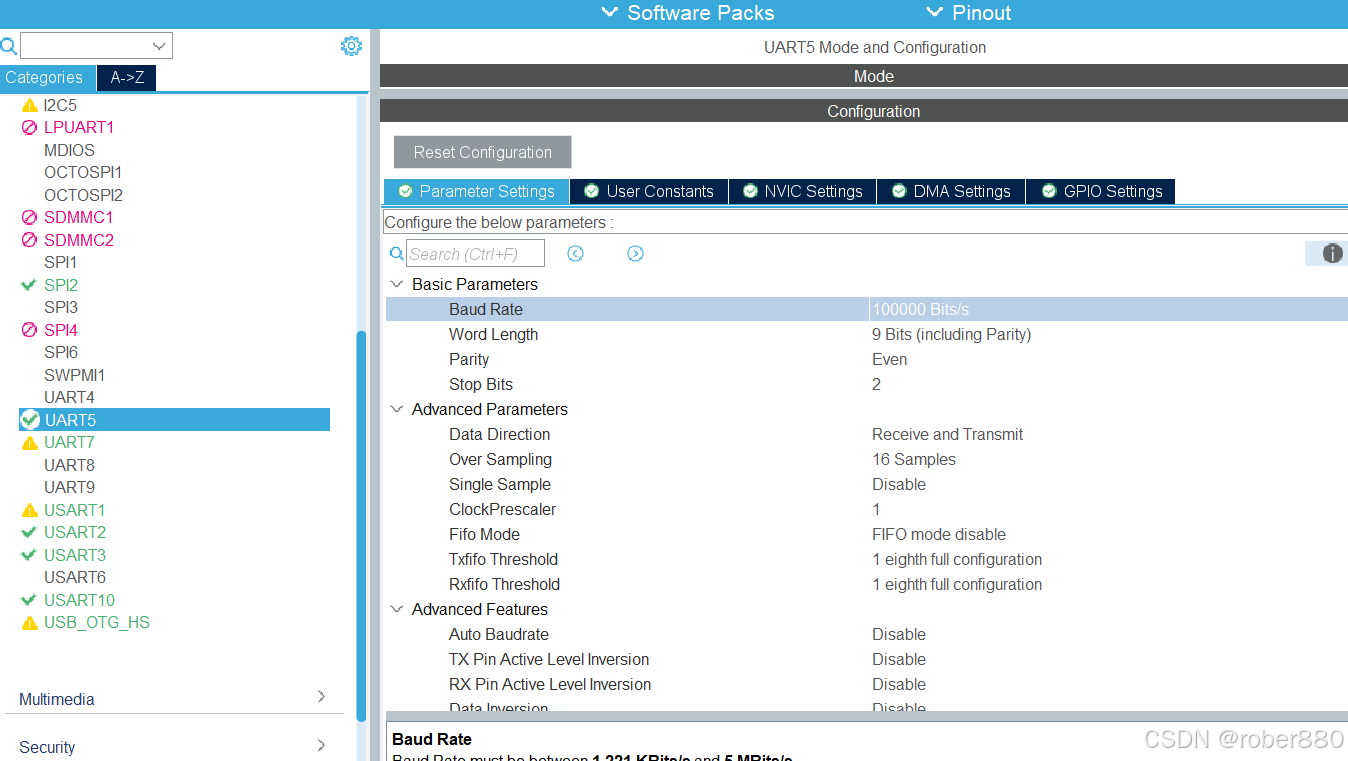
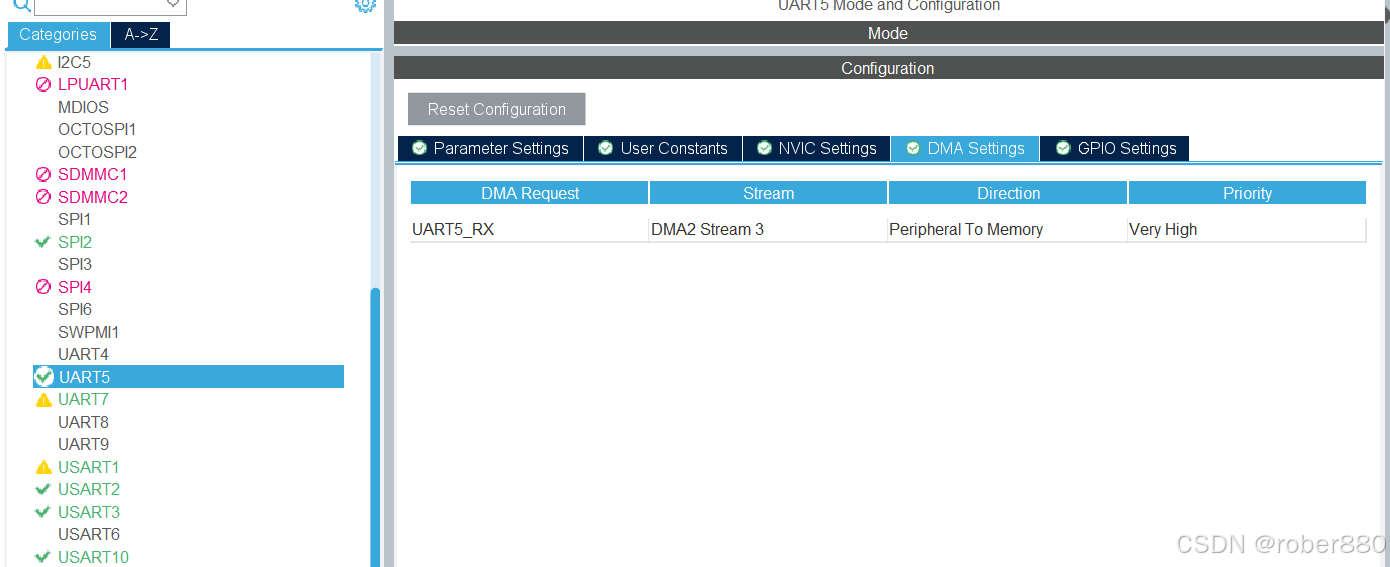
使用UART5,波特率100000,数据位9,停止位2。DMA2 Stream3.
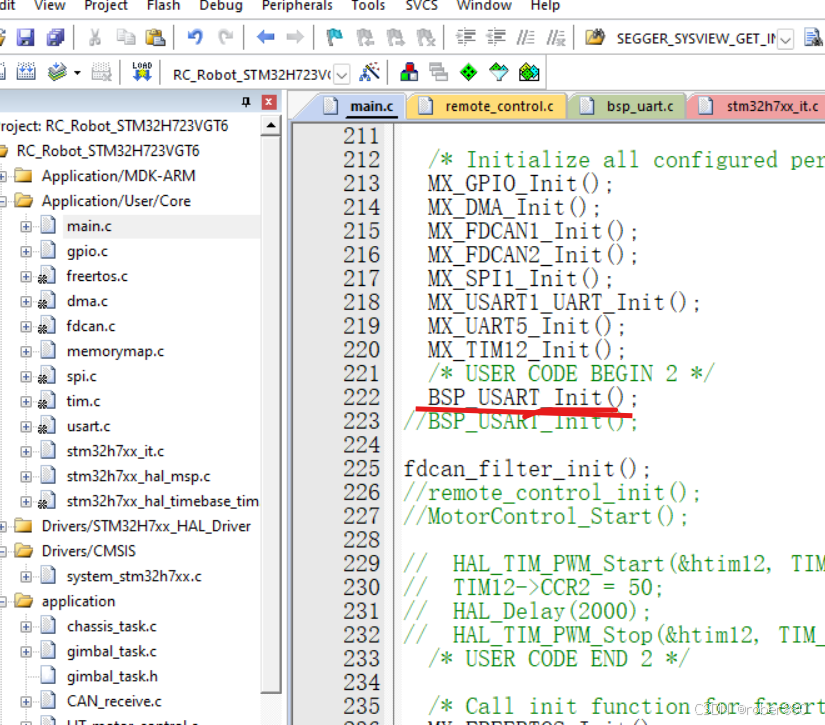
main.c里初始化串口
移植bsp.uart,Remote_Control两组文件。
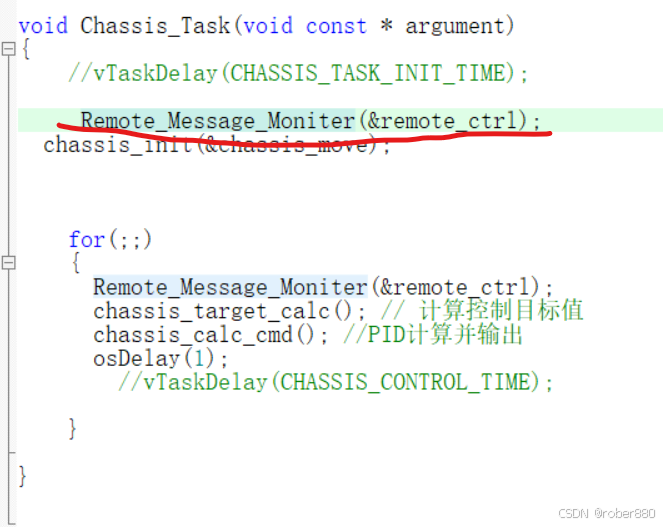
把遥控器监视函数放到FreeRTOS任务里,或者定时器中断里执行,用于在监视串口观察数据
使用UART5,波特率100000,数据位9,停止位2。DMA2 Stream3.
main.c里初始化串口
移植bsp.uart,Remote_Control两组文件。
把遥控器监视函数放到FreeRTOS任务里,或者定时器中断里执行,用于在监视串口观察数据
 868
1050
868
1050

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























