






所需硬件:
智能小车底座:

这里用的两驱三轮版。
stm32f103c8t6 :
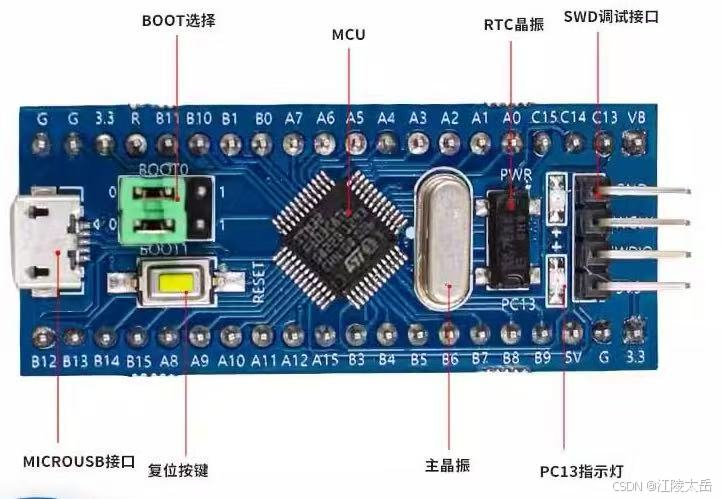
这里也可使用野火的stm32f103c8t6

你的st-link的接口可能与野火的板子的引脚不对应,其中TCK与SWCLK对应,TMS与SWDIO对应
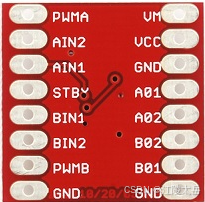
tb6612fng电机驱动模块:
lm2596可调降压模块:
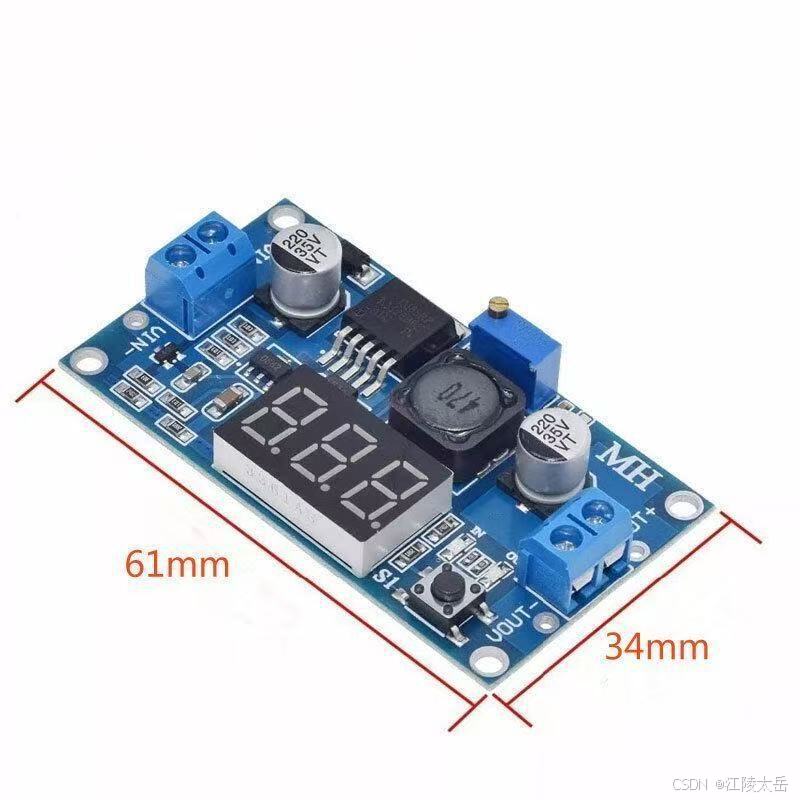
直接搜模块型号学习用法
st-link v2

tcrt5000红外传感器

STM32CubeIDE
下载地址:
STM32CubeIDE - Integrated Development Environment for STM32 - STMicroelectronics
官网下载需要注册意法半导体的账号,注册一个就行,后续用得到。
安装教程:
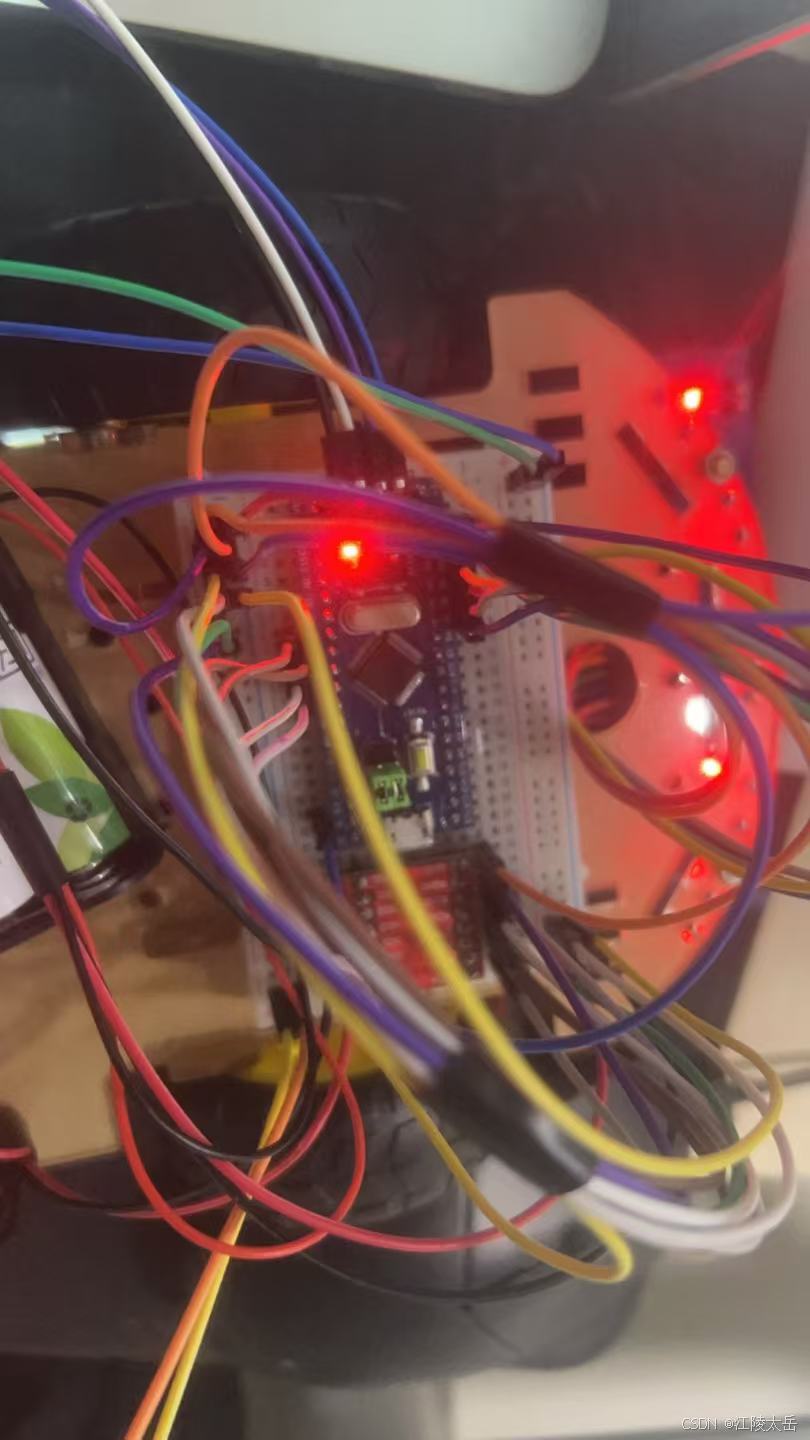
组装:
这是我的代码所用的链接顺序
寻迹模块-32
out5-B7 紫
out4-B6 白
out3-B5 蓝
out2-B9 绿
out1-B8 黄
电机驱动-32
BIN2-A6
BIN1-A5
AIN2-A4
AIN1-A3
PWMB-5v
PWMA-5v
STBY-5v
找一个12V电源,用面包板分出两块,一块接tb6612fng电机驱动模块的vm口,一块接lm2596可调降压模块vin+,和vin-。lm2596可调降压模块输出调为5v用来接stm32的5v口,和电机驱动模块的vcc口,以及红外模块的vcc。车轮接电机驱动模块的A01,A02,B01,B02。正极接01,负极接02。
代码:
创建工程文件:
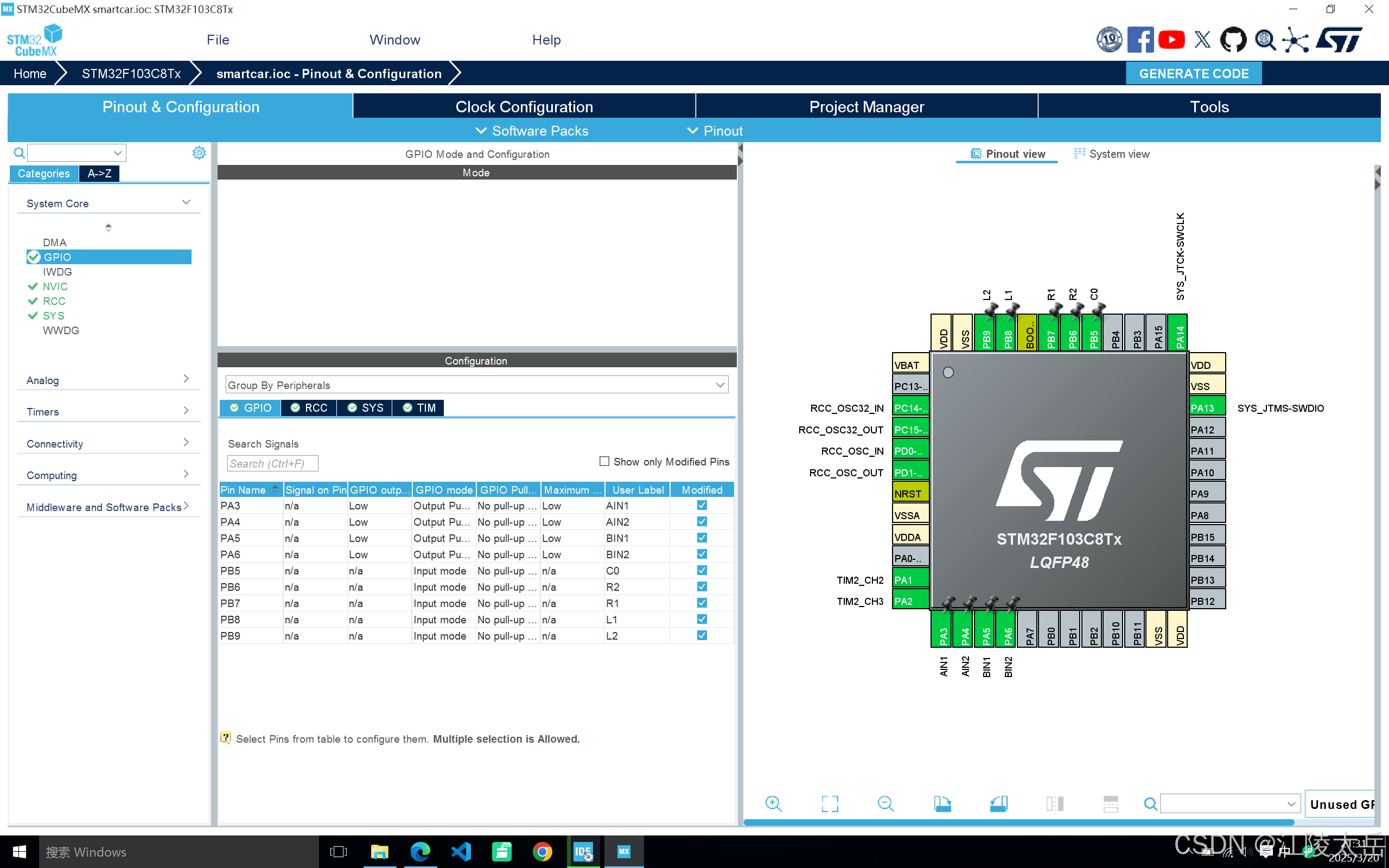
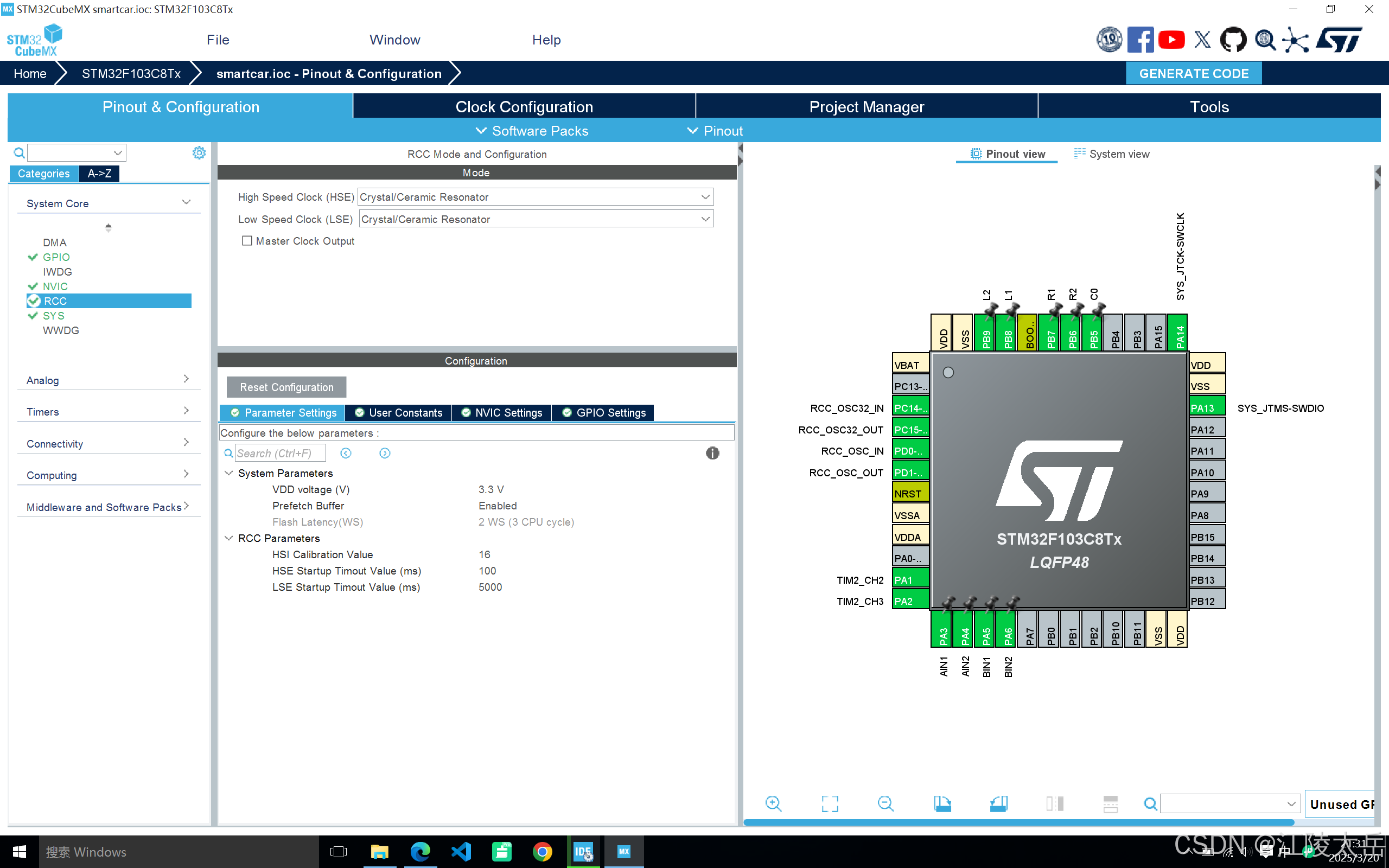
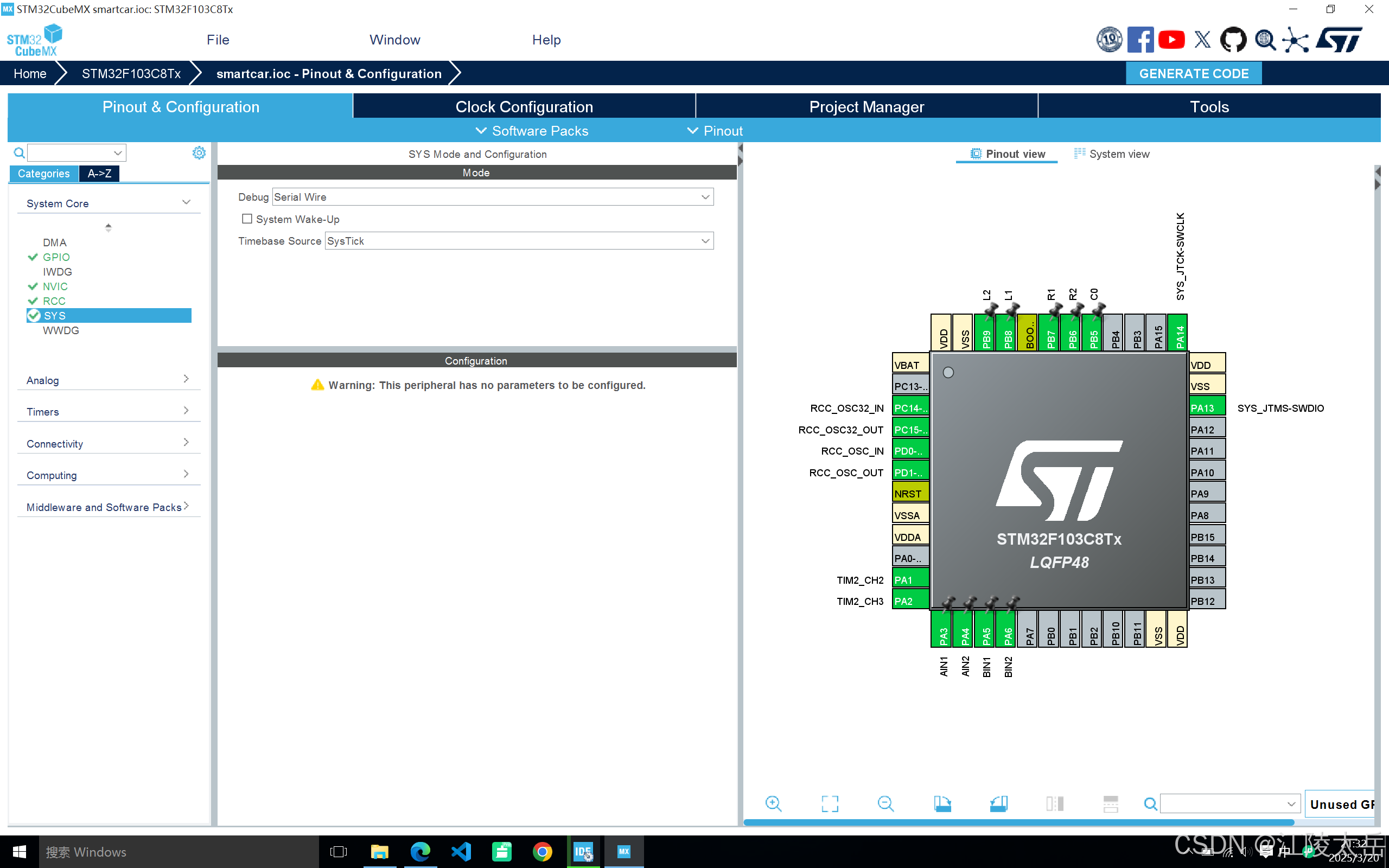
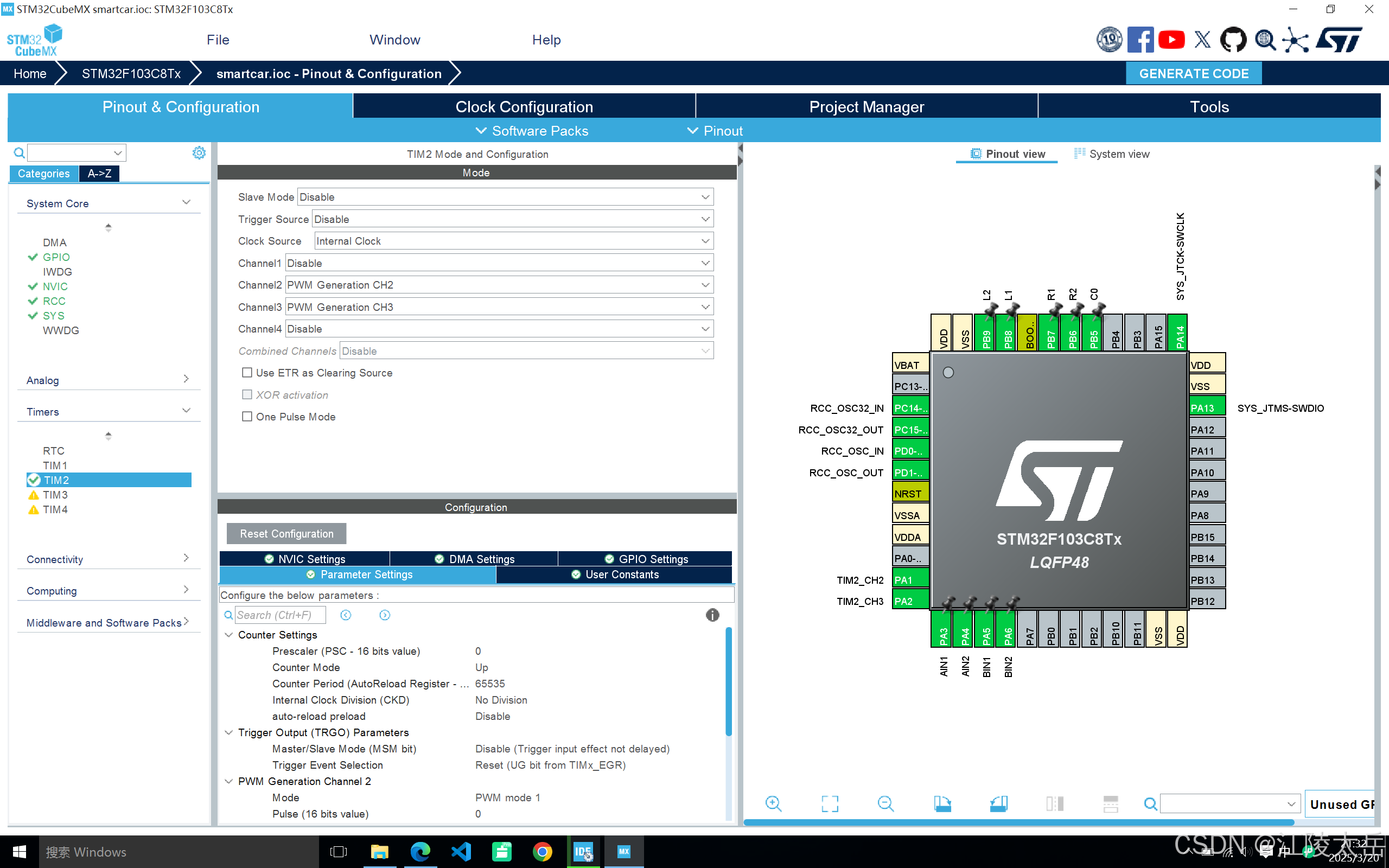
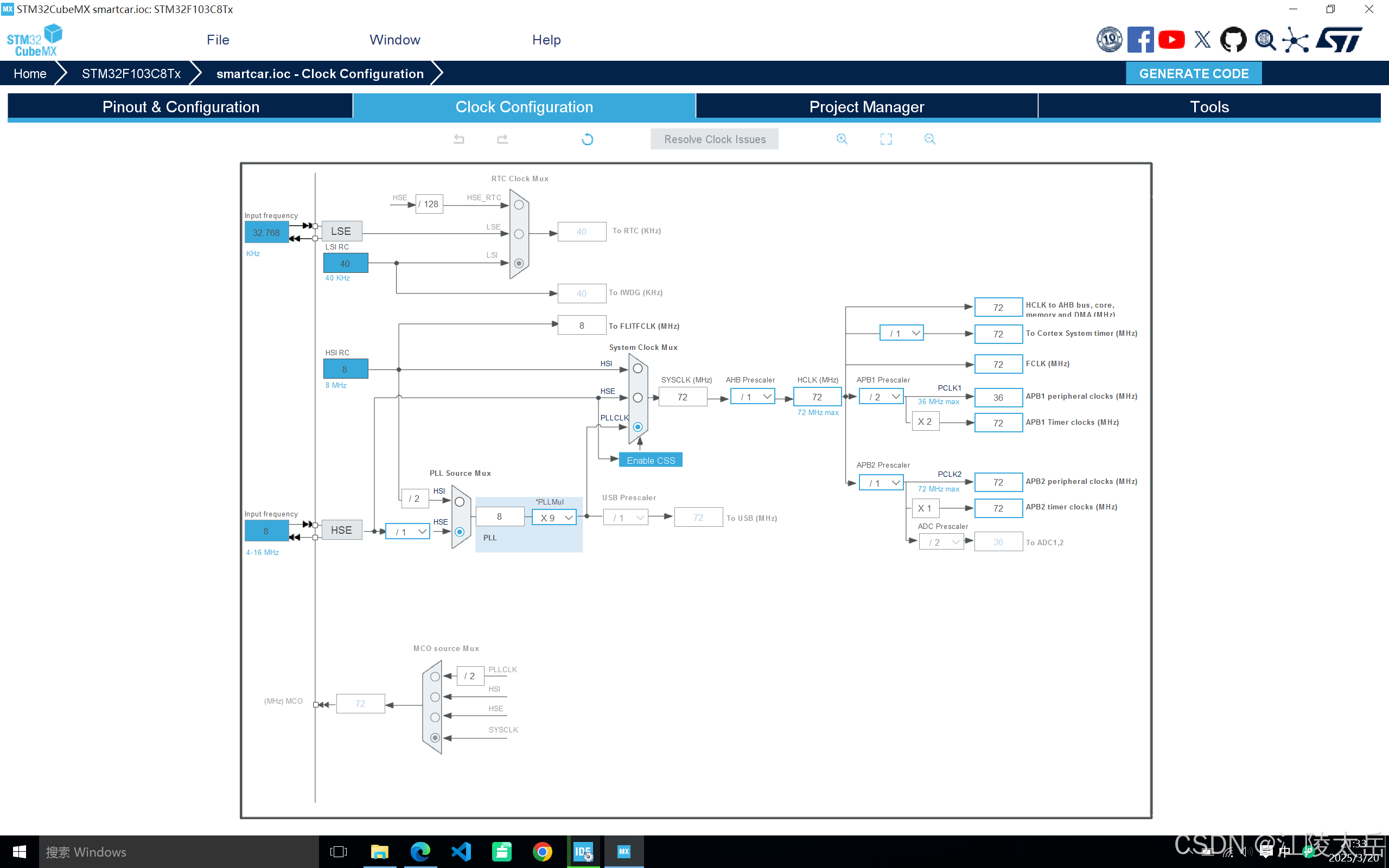
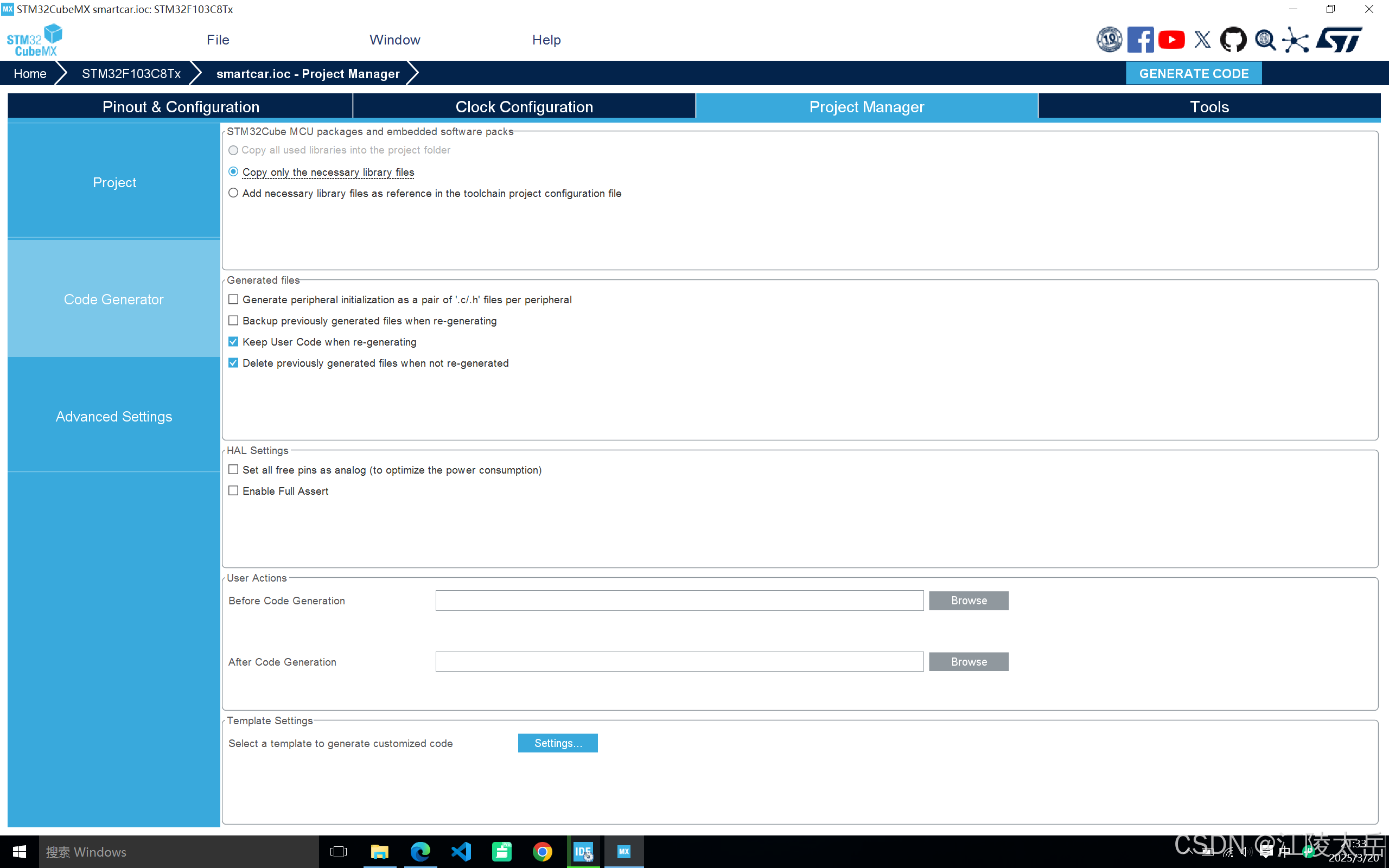
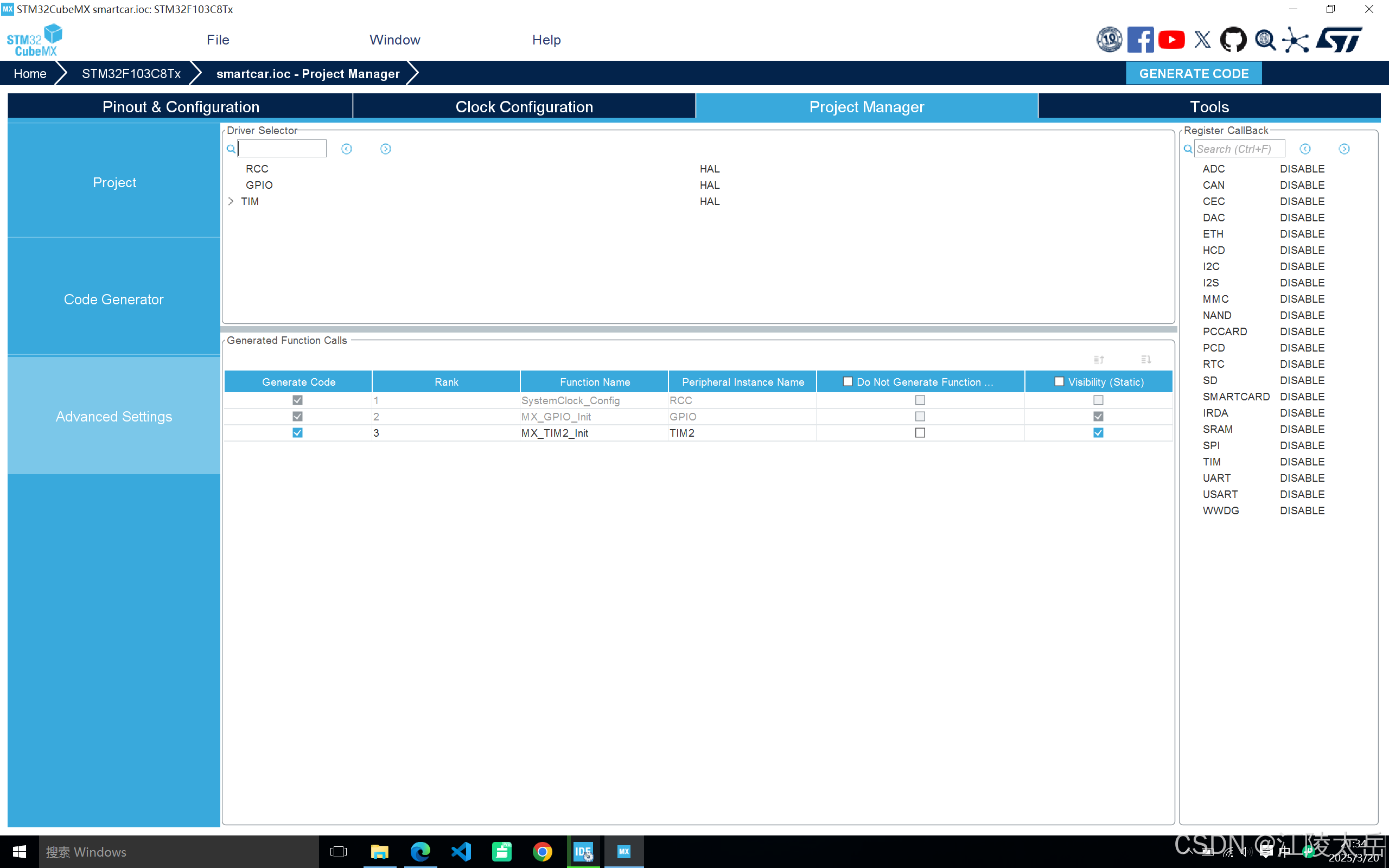
打开STM32Cubeide,创建工程文件 ,在安装教程的那个视频里有初始化教程,照着那个设置就行,注意各个引脚的定义,红外模块是input,电机驱动模块是output。
不会的可以照着我的改(我用的mx演示,大差不差)

代码:
代码主要靠改这位大佬的代码:
stm32循迹小车详细制作过程(附加完全版代码)_stm32小车详细教程-CSDN博客
.c代码,可直接复制覆盖
2025.3.25改了改代码(注意这个代码只能用来走最简单无交叉,无短路圆圈,要实现更多功能需要自己改)
main.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "motor.h"
#include "stm32f1xx_hal_tim.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
TIM_HandleTypeDef htim2;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_TIM2_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_TIM2_Init(void); // Added by STM32CubeMX
void Delay(uint32_t count)
{
uint32_t i = 0;
for (; i < count; i++);
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM2_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM2_Init();
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_2);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_3);
while (1)
{
if (LEFT_ONE == 1 && LEFT_TWO == 1&&GO == 0 && RIGHT_ONE == 1 && RIGHT_TWO == 1)
{
run();
}
if (LEFT_ONE == 0 && LEFT_TWO == 1&&GO == 1 && RIGHT_ONE == 1 && RIGHT_TWO == 1)
{
right();
}
if (LEFT_ONE == 1 && LEFT_TWO == 1&&GO == 1 && RIGHT_ONE == 0 && RIGHT_TWO == 1)
{
left();
}
if (LEFT_ONE == 0 && LEFT_TWO == 0&&GO == 0 && RIGHT_ONE == 0 && RIGHT_TWO == 0)
{
turn();
HAL_Delay(200);
stop();
HAL_Delay(5000);
}
if (LEFT_ONE == 1 && LEFT_TWO == 0&&GO == 1 && RIGHT_ONE == 1 && RIGHT_TWO == 1)
{
stop();
} }
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
/* USER CODE END 3 */
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief TIM2 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM2_Init(void)
{
/* USER CODE BEGIN TIM2_Init 0 */
/* USER CODE END TIM2_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
/* USER CODE BEGIN TIM2_Init 1 */
/* USER CODE END TIM2_Init 1 */
htim2.Instance = TIM2;
htim2.Init.Prescaler = 0;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 65535;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_2) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_3) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM2_Init 2 */
/* USER CODE END TIM2_Init 2 */
HAL_TIM_MspPostInit(&htim2);
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* USER CODE BEGIN MX_GPIO_Init_1 */
/* USER CODE END MX_GPIO_Init_1 */
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOA, AIN1_Pin|AIN2_Pin|BIN1_Pin|BIN2_Pin, GPIO_PIN_RESET);
/*Configure GPIO pins : AIN1_Pin AIN2_Pin BIN1_Pin BIN2_Pin */
GPIO_InitStruct.Pin = AIN1_Pin|AIN2_Pin|BIN1_Pin|BIN2_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/*Configure GPIO pins : C0_Pin R2_Pin R1_Pin L1_Pin
L2_Pin */
GPIO_InitStruct.Pin = C0_Pin|R2_Pin|R1_Pin|L1_Pin
|L2_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* USER CODE BEGIN MX_GPIO_Init_2 */
/* USER CODE END MX_GPIO_Init_2 */
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
自己添加一个motor.c文件放到对应文件夹
#include "motor.h"
#include "stm32f1xx_hal.h"
#include "main.h"
extern TIM_HandleTypeDef htim2; // Declared in main.h
void run(void)
{
HAL_GPIO_WritePin(GPIOA, AIN1_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA, AIN2_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, BIN1_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA, BIN2_Pin, GPIO_PIN_RESET);
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_2, 200); // Left motor speed
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_3, 200); // Right motor speed
}
void back(void)
{
HAL_GPIO_WritePin(GPIOA, AIN1_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, AIN2_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA, BIN1_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, BIN2_Pin, GPIO_PIN_SET);
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_2, 300);
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_3, 300);
}
void right(void)
{
HAL_GPIO_WritePin(GPIOA, AIN1_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA, AIN2_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, BIN1_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, BIN2_Pin, GPIO_PIN_SET);
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_2, 200);
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_3, 200);
}
void left(void)
{
HAL_GPIO_WritePin(GPIOA, AIN1_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, AIN2_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA, BIN1_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA, BIN2_Pin, GPIO_PIN_RESET);
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_2, 200);
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_3, 200);
}
void turn(void)
{
HAL_GPIO_WritePin(GPIOA, AIN1_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA, AIN2_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, BIN1_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, BIN2_Pin, GPIO_PIN_SET);
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_2, 250);
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_3, 250);
}
void stop(void)
{
HAL_GPIO_WritePin(GPIOA, AIN1_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, AIN2_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, BIN1_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, BIN2_Pin, GPIO_PIN_RESET);
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_2, 0);
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_3, 0);
}
.h代码
自己添加一个motor.h放到对应文件夹
/*
* motor.h
*
* Created on: Mar 20, 2025
* Author: Loyal
*/
#ifndef __MOTOR_H
#define __MOTOR_H
#include "stm32f1xx_hal.h"
void run(void);
void back(void);
void right(void);
void left(void);
void turn(void);
void stop(void);
// Sensor pin definitions
#define LEFT_ONE HAL_GPIO_ReadPin(GPIOB, L1_Pin)
#define LEFT_TWO HAL_GPIO_ReadPin(GPIOB, L2_Pin)
#define RIGHT_ONE HAL_GPIO_ReadPin(GPIOB, R1_Pin)
#define RIGHT_TWO HAL_GPIO_ReadPin(GPIOB, R2_Pin)
#define GO HAL_GPIO_ReadPin(GPIOB, C0_Pin)
#endif /* __MOTOR_H */
添加hal库
这个还需要你添加两个hal库,不然会报错
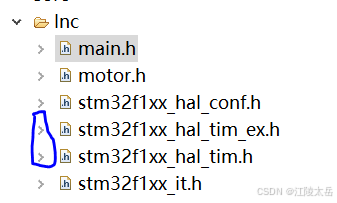
就是这两个.h文件,下载额外hal库可以看这个帖子
下完以后解压,放到工程文件对应文件夹下,然后右键Inc这个文件,在弹出的菜单中点击refresh,刷新一下即可。然后就可以编译了。
hal 库那一块可能表述的不是很清楚,如果已经有了就不用下了,如果没有,下完解压了以后,在解压后的文件夹中找到同名文件夹,然后找到这两个文件,放到工程文件的文件 Inc 文件夹中就行,然后回到 ide 刷新一下。
烧录:

点击小锤子编译,点击小三角是烧录,第一次烧录会有弹窗,一切默认点击OK就行。
问题:
1.有时候编译可能会提示main.c文件中有一个"}"出错,删了就行。
2.无法烧录,点击烧录之后,会出现错误弹窗,这个问题很多,直接being搜错误信息就行,我举个我遇见的。
芯片被锁了,我从pdd买的芯片一开始烧录不进去,翻了很多帖子,有的说不是正版(不是意法的芯片没法用cubeide烧录),有的说驱动不行,也有的说是boot0,和boot1的问题(烧录时boot0接1,boot1接0,运行时boot0,boot1接0),后来发现都不是,我的芯片也是意法出的,最后终于找到一个帖子,说是芯片被锁,试了一下,成功了。
就是帖子中的原因一
为什么是MDK的,因为我搜ide相关问题,解决办法几乎没有,于是无奈转战MDK,结果还是无法烧录,于是继续搜索错误信息,就找到了结果,芯片解开以后cubeide也可以正常使用了。
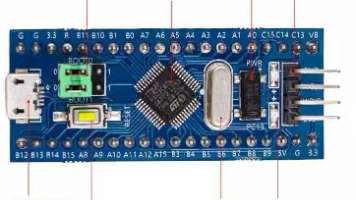
图中两个小绿帽就是boot,不过我的板子boot都接0也能烧录。
3.给小车供电时尽量不要用可充电电池,会导致电压不稳定,也可能是我的电池有问题,我在换了一般电池后可正常运行,大家可以多试验试验。
结语:
至此一个stm32循迹小车就完成了,不过我也是一个stm32初学者,教程中也可能有很多错误的地方,但是希望我的帖子能给基础制作stm32循迹小车的小伙伴一点帮助,不用像我一样为了解决一个问题翻一晚上帖子。

















 4164
4164

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









