






一. 三相异步机的启动
1. 启动存在的问题:转子电流过大,起动转矩过小
,当n=0时,s=1。
2. 启动方法:
(1)串入转子电阻调速
(2)降压启动
原理:Y-▲连接切换,▲电压变为Y的倍
缺点:起动转矩变为额定的1/3倍。
(3)变频变压启动
放到调速里面说。
二. 三相异步机的调速:
(一)改变转差率调速
1. 消耗型
2. 回馈型
(二)改变磁极对数(略)
(三)变频调速
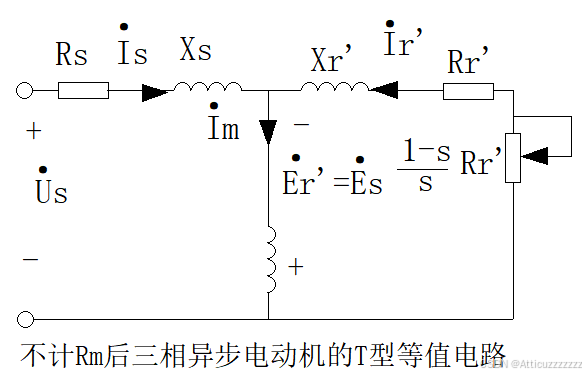
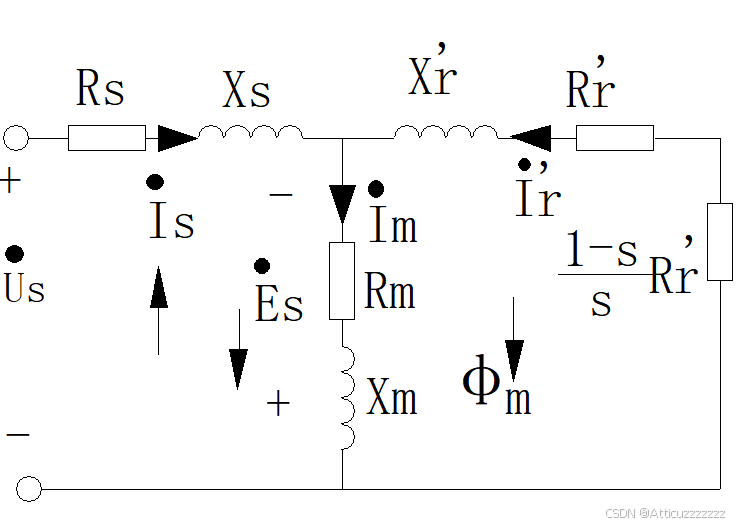
,
1. f>fn Us有耐压限制不能过大,因此必须减少磁通;
方法:弱磁升速
,高频时Rs可以忽略,此时scr反比于f。
所以 (1)基频以上调速最大转矩与频频了的平方成反比;
所以 (2)基频以上调速时最大转矩对应的转速降落近似为常数。
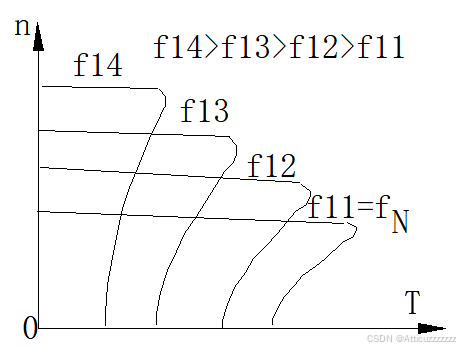
(3)基频以上变频调速近似为恒功率调速。
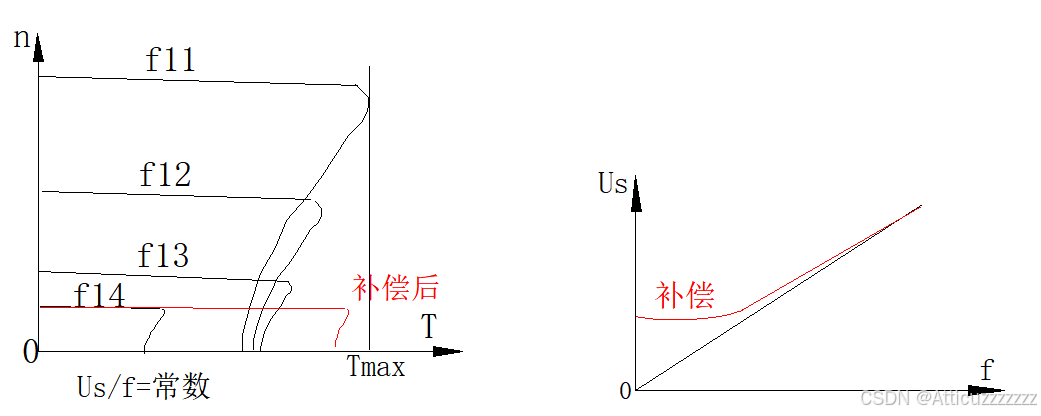
2. f<fn 如果Us不变,磁通增大,铁心过饱和,励磁电流过大,电机发热严重。降频必须降压。
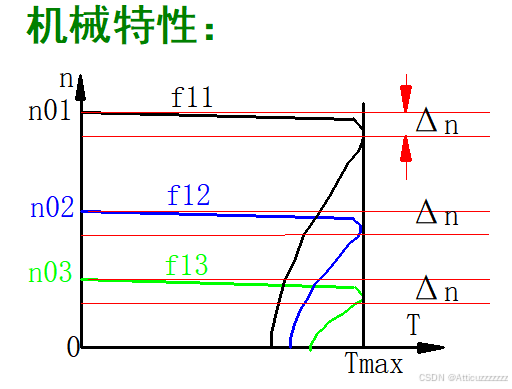
方法一:在额定转速下保持Es/f为常数的变频调速
,频率减小(此时减速,s增大),电磁转矩减小
电磁转矩求导,令其等于0,可得最大转矩:(由于转子电抗一般是感性的,所以用电感表达)
对应的转速:
可见,下降的转速Δn不随着频率变化,而Tmax也与f无关。
方法二:保持Es/f为常数时改变转差角频率调速
转差率:,Rs很小可以忽略,此时
s在较小范围内,不同频率的机械特性为一族平行直线。
最大电磁转矩:,忽略Rs时也是常数。
但是,为什么可以忽略Rs?因为电抗Xs和Xr较大。然而,让频率较低时,就不能忽略了,此时sΔn会减小。
三. 三相异步机的制动
(一)回馈制动
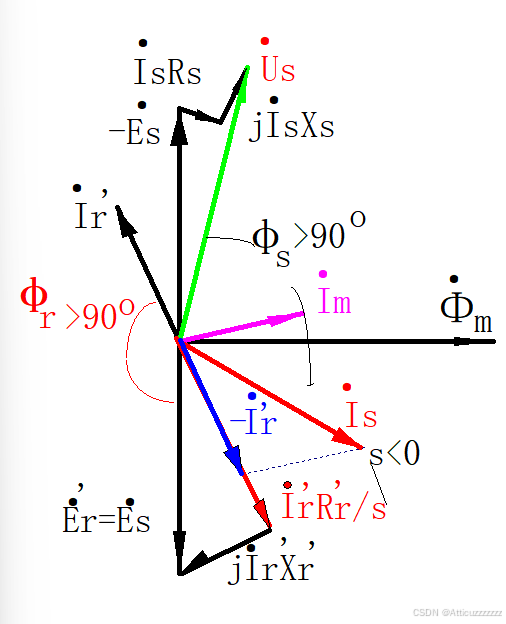
1. 条件:n>n0, s<0(转速超出额定的情况,可以减到额定转速以下)
2. 功率平衡关系:发电状态
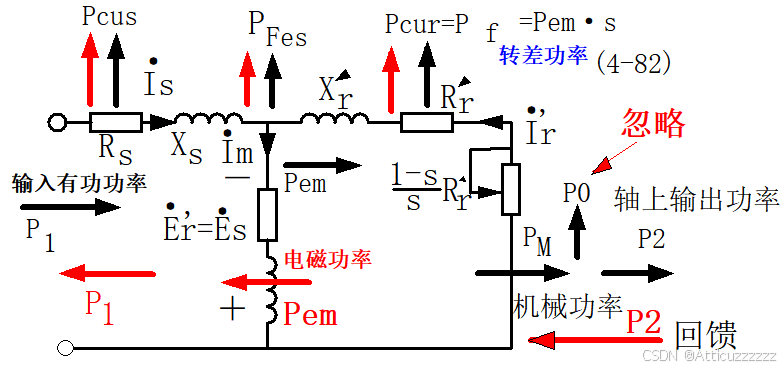
图中Pem(电磁功率),Pcur(转子铜耗)、机械功率均小于0,反馈回P1中
,
机械特性:
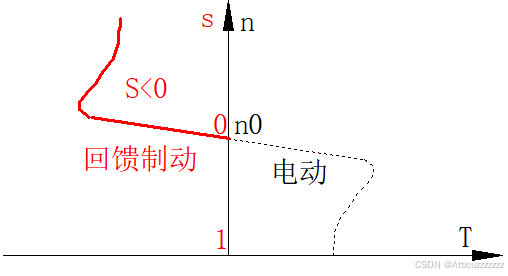 ,
,
回馈制动发生时,机械特性整体改变,原先运行点移至第二象限,开始回馈制动。
转矩平衡方程:(额定负载范围内的近似式)
(二)反接制动
转子实际旋转方向与定子磁场旋转方向相反,s>1
P2<0,Pem>0, 电动机输入功率:Pem-P2=3Ir'^2Rr'
机械特性: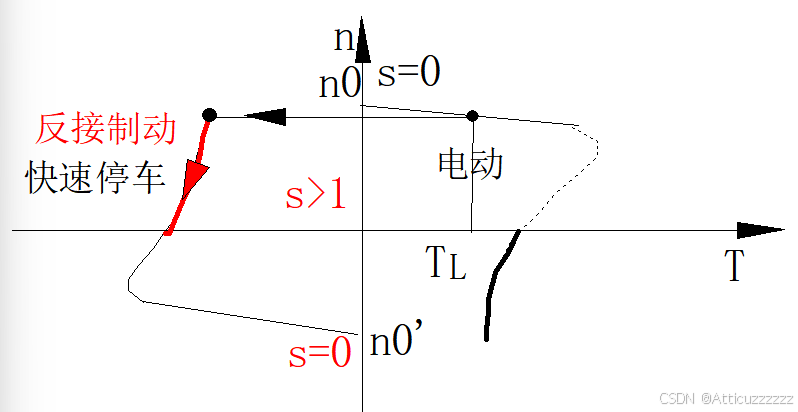
(三)能耗制动(略)
先写这么多吧。。等做题的时候再补

















 2676
2676

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









