






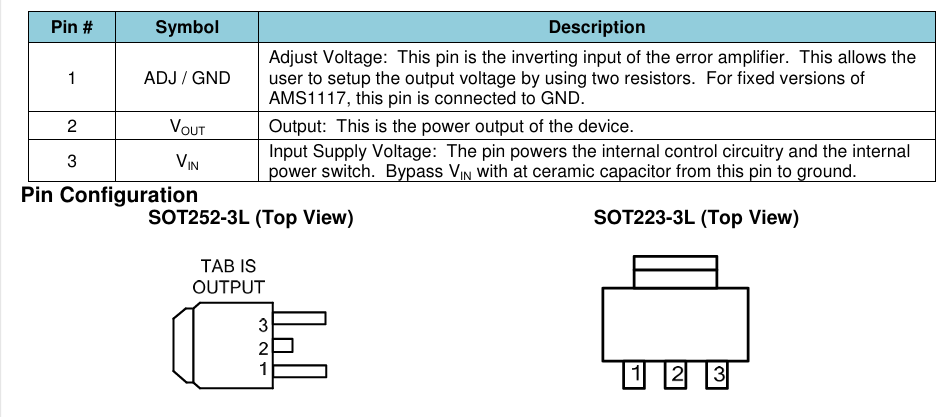
元件介绍
ESP12F

- RST: 高电平复位 (/RST或者RST# 低电平复位)
- ADC:A/D转换结果,(进行AD转换原因:由于在物理界中很多信息都是连续的,要将模拟信号转化成数字信号)
- EN:芯片使能端,高电平有效(芯片使能端:用于开启或关闭芯片的特定功能或整个芯片的工作状态。)(低电平使能:标记为 /EN 或 EN̅,EN=0时工作,EN=1时关闭)
- VCC:3.3供电
- IO0:下载模式:外部拉低 运行模式:悬空或者外部拉高
1.主控电路
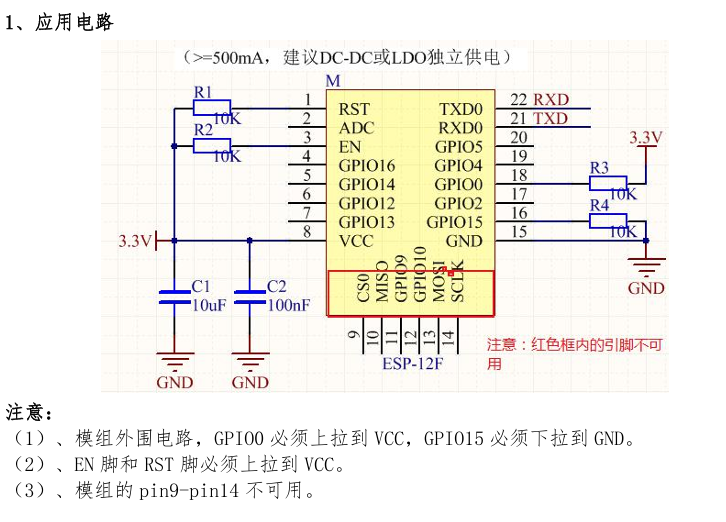
为什么要在电源旁边并联一个10uf的电容?
1. 核心作用:电源去耦(Decoupling)
-
问题背景:
数字芯片(如MCU、传感器)工作时会产生瞬态电流突变(例如ESP8266在Wi-Fi发射时电流从50mA骤增至300mA)。 -
电容的作用:
10μF电容作为“微型储能池”,在电流突增时快速放电,弥补电源响应延迟,避免电压跌落(Brownout)。
2.为什么是10μF?
-
经验值:兼顾储能能力(应对毫秒级电流需求)与PCB空间占用。
-
芯片要求:多数MCU/无线模块的Datasheet明确推荐此容值(如STM32要求至少4.7μF)。
-
性价比:陶瓷10μF电容成本低且可靠性高。
一定要注意在后面PCB布线的时候:尽量靠近芯片VCC引脚,使其减少走线电感的影响(目标:环路面积最小化)
1.为什么要在启动电路的时候需要串联一个10千欧的电阻?
通过10kΩ电阻上拉,确保引脚在无外部驱动时保持确定的高电平状态(避免悬空导致的随机误触发)。
2.为什么选择10千欧?
| 功耗低,兼容多数场景(推荐) | 抗干扰稍弱(仍满足一般需求 |
根据上述描述,部分电路图如下:
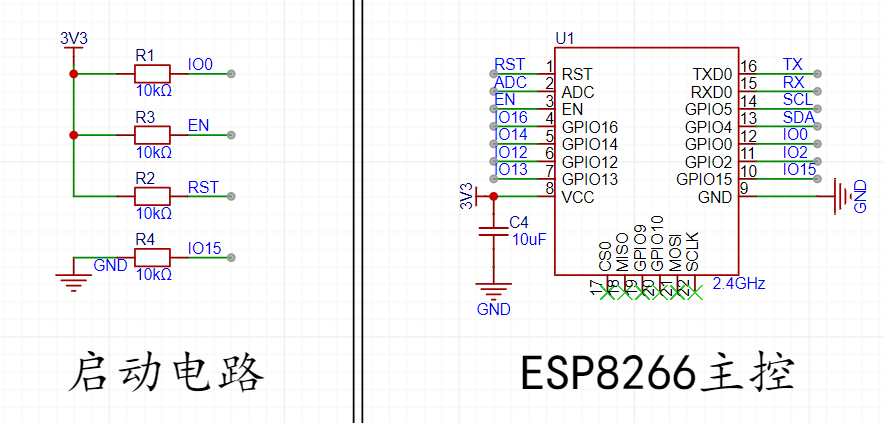
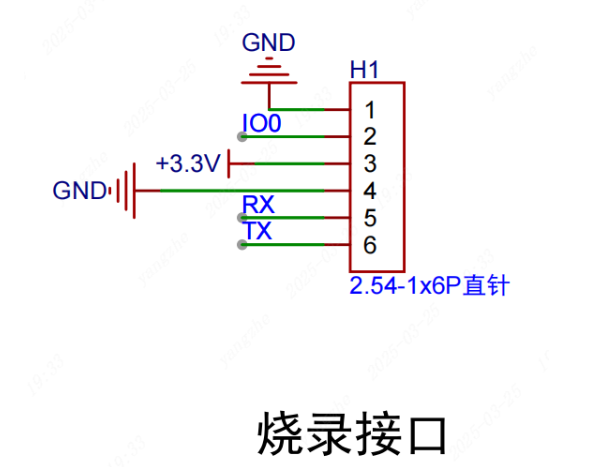
2.模式切换电路
GPIO0:下载模式——低
运行模式——高
ESP8266的启动模式包括运行模式和下载模式,为确保能够顺利烧录固件并调试程序,电路设计中引出了TX、RX、GND和3.3V引脚作为串口通信接口,同时增加了IO0和GND引脚用于进入下载模式的跳线设计。用户可以通过简单的跳线操作快速切换工作模式,从而实现程序烧录与正常运行。
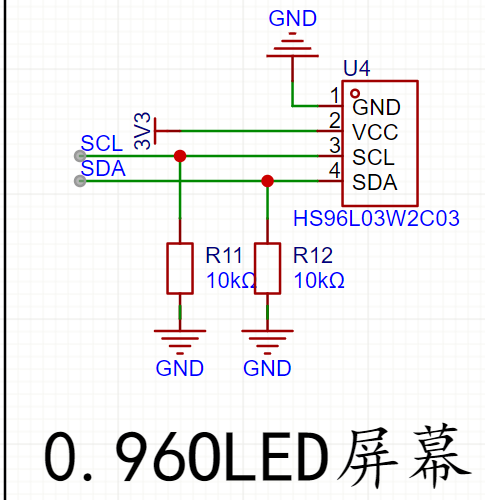
3. I2C 屏幕显示
I2C协议要求开漏输出
在OLED屏幕(如常见的SSD1306驱动芯片)设计中,SCL和SDA引脚通常配置为开漏输出(Open-Drain),故需要外部上拉电阻确保信号的完整输出
电路原理图如下
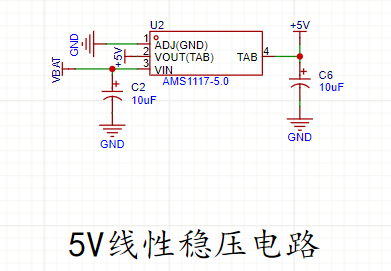
4.电源供电电路
1.舵机
根据舵机手册,舵机的驱动电压为4.8-6V,我们选择5V驱动
选择AMS1117-5V固定输出LDO (LDO:低压差线性稳压器)
电路原理图如下:
2.主控电源
ESP8266数据手册主控电压在3.3V

















 582
582

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









