






水准测量局限性:
由图可知,在水准测量时由于受到尺长的限制,不利于坡度较大情况下的高差测量,在此情况下,可采用三角高程测量。

三角高程测量原理:
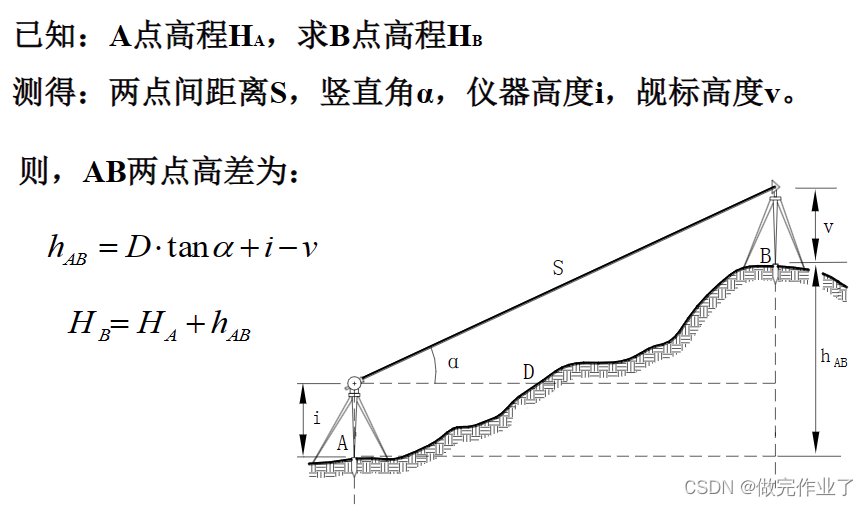
由此可以看出,测站高程HA为已知值,测站A仪器高 i 以及待测点B仪器高 v 为测量值,平距离 D 及垂直角 α 为观测值。假设 = 50, i = 1,v = 1.5,S = 100,α = 45°,则
= 50, i = 1,v = 1.5,S = 500,α = 45°,则
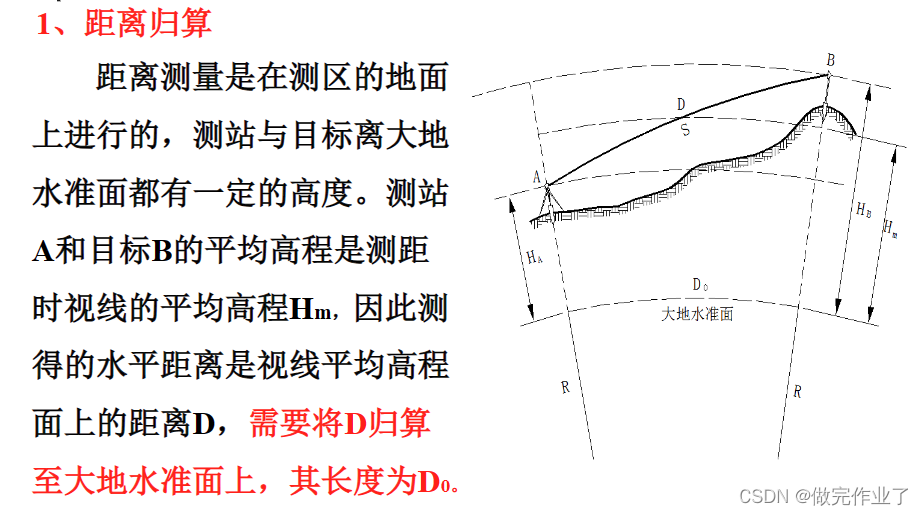
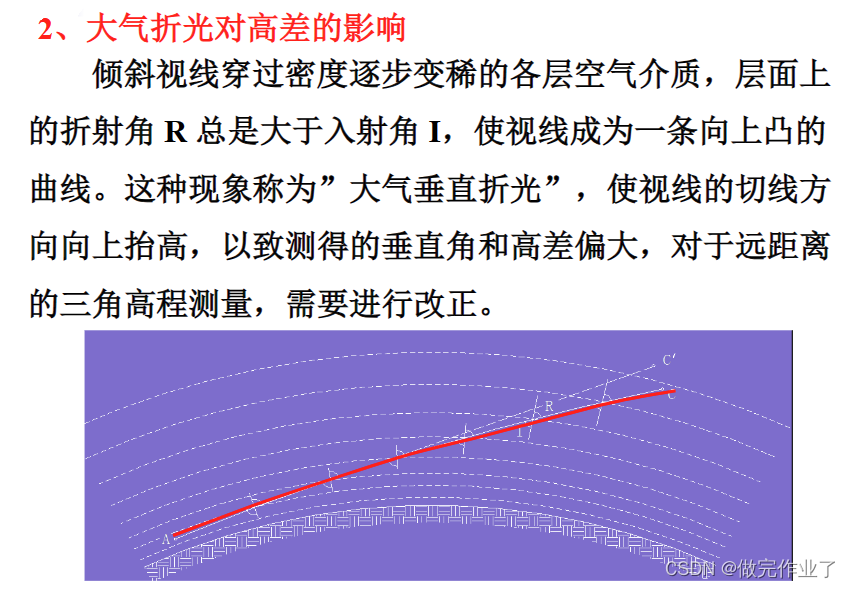
远距离三角高程测量:
当距离较远(大于300m)时,考虑地球曲率和大气折光对高差的影响,应对观测得到的高差加上 “ 球差改正 ” 和 “ 气差改正 ” ,即 “ 两差改正 ”。
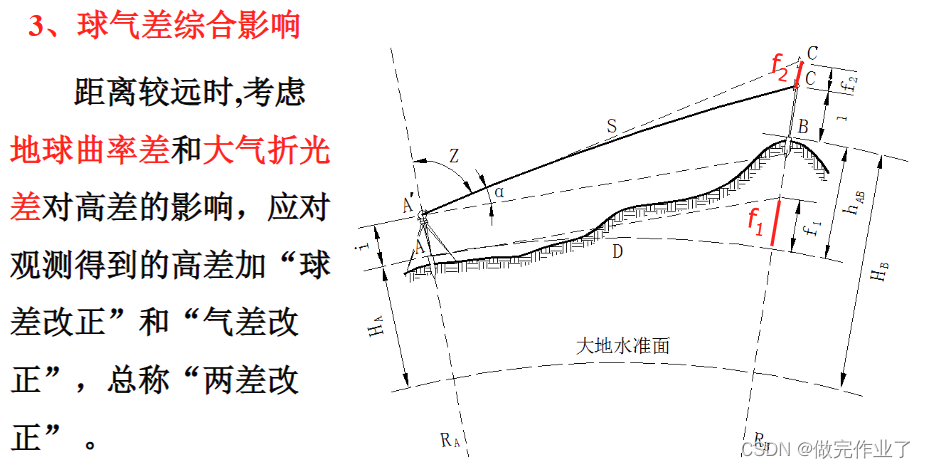
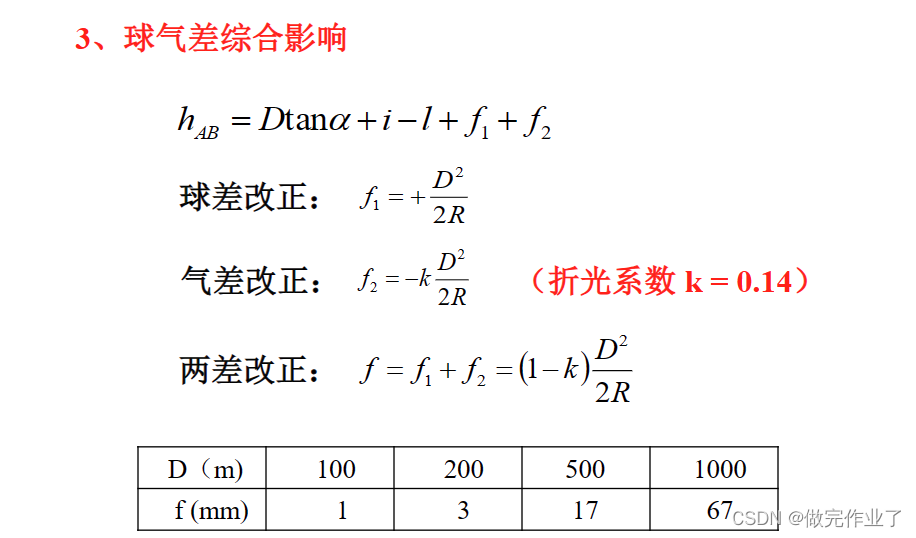
其中R为地球半径,假设观测距离为500m,那么高差的两差改正为
≈ 17mm
此时A、B两点之间的高差为:
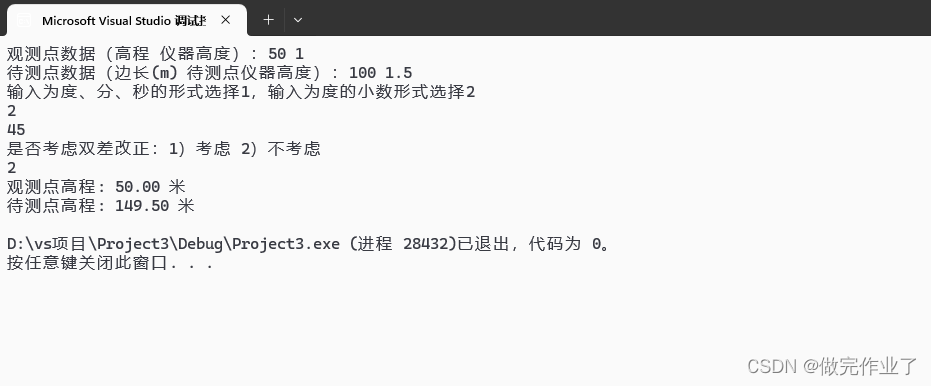
代码实例:
c语言代码及运行结果如下:
#define _CRT_SECURE_NO_WARNINGS 1
#include <stdio.h>
#include <math.h>
#define pi 3.141592653589793238463
#define R 6371.393
#define k 0.14
// 计算高程的函数
double computeElevation(double distance, double angle, double instrumentHeight)
{
// 计算高程,这里假设三角形的底边与地面平行
double elevation = distance * tan(angle) - instrumentHeight;
return elevation;
}
//计算双差改正
double difference(double distance)
{
double f = (1 - k) * distance * distance / 1000.0/1000.0/ 2.0 / R;
return f;
}
int main()
{
// 定义度分秒、或者度数小数形式,即选择参数
int num,num1;
double du, fen, miao,jiaodu;
double dushu;
// 观测点数据,obsInstrumentHeight-观测站仪器高度,obsheight观测站高程
double obsInstrumentHeight, obsheight;
// 观测站计算高度,即观测站高程+观测站仪器高度
double height;
// 待测点数据,testDistance-观测距离,testAngle-观测角度,obsInstrumentHeightTest-待测点仪器高,testHeight-待测点高程
double testDistance, testAngle, testInstrumentHeightTest, testHeight;
// 输入观测点数据
printf("观测点数据(高程 仪器高度):");
scanf("%lf %lf", &obsheight, &obsInstrumentHeight);
height = obsheight + obsInstrumentHeight;
// 输入待测点数据
printf("待测点数据(边长(m) 待测点仪器高度):");
scanf("%lf %lf", &testDistance, &testInstrumentHeightTest);
// 定义弧度变量
double radian;
// 处理输入角度
printf("输入为度、分、秒的形式选择1,输入为度的小数形式选择2\n");
scanf("%d", &num);
if (num == 1)
{
scanf("%lf %lf %lf", &du, &fen, &miao);
// 角度转弧度
jiaodu = du + fen / 60.0 + miao / 3600.0;
radian = (jiaodu * pi) / 180;
}
else
{
scanf("%lf", &dushu);
// 角度转弧度
radian = (dushu * pi) / 180;
}
printf("是否考虑双差改正:1)考虑 2)不考虑\n");
scanf("%d", &num1);
if (num1 == 1)
{
// 计算待测点高程
testHeight = computeElevation(testDistance, radian, testInstrumentHeightTest) + difference(testDistance/1000.0)+height;
}
else
{
// 计算待测点高程
testHeight = computeElevation(testDistance, radian, testInstrumentHeightTest) + height;
}
// 输出结果
printf("观测点高程: %.10lf 米\n", obsheight);
printf("待测点高程: %.10lf 米\n", testHeight);
return 0;
}
c++代码及运行结果如下:
#include <iostream>
#include <cmath>
#include <iomanip>
#define pi 3.141592653589793238463
#define R 6371.393
#define k 0.14
// 计算高程的函数
double computeElevation(double distance, double angle, double instrumentHeight)
{
// 计算高程,这里假设三角形的底边与地面平行
double elevation = distance * tan(angle) - instrumentHeight;
return elevation;
}
//计算双差改正
double difference(double distance)
{
double f = (1 - k) * distance * distance / 1000000.0 / 2.0 / R;
return f;
}
int main()
{
//定义度分秒、或者度数小数形式,即选择参数
int num,num1;
double du, fen, miao, jiaodu;
double dushu;
// 观测点数据,obsInstrumentHeight-观测站仪器高度,obsheight观测站高程
double obsInstrumentHeight , obsheight;
//观测站计算高度,即观测站高程+观测站仪器高度
double height;
// 待测点数据,testDistance-观测距离,testAngle-观测角度,obsInstrumentHeightTest-待测点仪器高,testHeight-待测点高程
double testDistance, testAngle, testInstrumentHeightTest, testHeight;
// 输入观测点数据
std::cout << "观测点数据(高程 仪器高度):";
std::cin >> obsheight >> obsInstrumentHeight;
height = obsheight + obsInstrumentHeight;
// 输入待测点数据
std::cout << "待测点数据(边长 待测点仪器高度):";
std::cin >> testDistance >> testInstrumentHeightTest;
//定义弧度变量
double radian;
//处理输入角度
std::cout << "输入为度分秒的形式选择1,输入为度的小数形式选择2\n";
std::cin >> num;
if (num == 1)
{
std::cin >> du >> fen >> miao;
//角度转弧度
jiaodu = du + fen / 60.0 + miao / 3600.0;
radian = (jiaodu * pi) / 180;
}
else
{
std::cin >> dushu;
//角度转弧度
radian= (dushu * pi) / 180;
};
std::cout << "是否考虑双差改正:1)考虑 2)不考虑\n";
std::cin >> num1;
if (num1 == 1)
{
// 计算待测点高程
testHeight = computeElevation(testDistance, radian, testInstrumentHeightTest) + difference(testDistance/1000.0)+height;
}
else
{
// 计算待测点高程
testHeight = computeElevation(testDistance, radian, testInstrumentHeightTest) + height;
}
// 输出结果
std::cout << "观测点高程: " << obsheight << " 米\n";
std::cout << std::fixed;
/* std::cout << "待测点高程: " << testHeight << " 米\n";*/
std::cout << "待测点高程: " << std::setprecision(6) << testHeight << " 米" << std::endl;
return 0;
}
注: 为什么这里考虑两差改正后结果并没有变,主要是因为这里假设的观测距离为500,0.5km,
计算两差改正 f = ( 1 - 0.14 ) * 0.5 * 0.5 ÷ 6371.393 ÷ 6371.393 ÷ 1000 = 0.0000000000052,改正数太小了,所以没有显示。( 最后除以1000是把单位为km转换成米。)
多传递点三角高程测量(数据批处理):
当待测点高度过高或与已知高程点距离过远时,那么仍然需要设置若干穿点用来传递高程,如下:
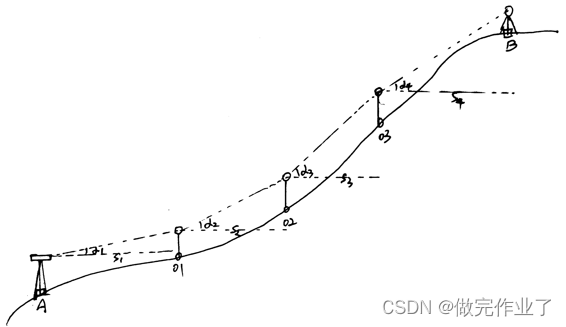
从图中可以看出,若要从已知高程点 A 测得 B 点高程,中间加了三个转点,且当在A点观测完后,需要记录 A 点的仪器高、01点的觇标高、水平距离S1、垂直角α1。在观测记录后将观测仪器从A点放置在01点转点位,将觇标放置在02点继续观测,依次类推直至觇标放置在B点,最后根据已知点 A 的高程加上各测段计算后的高差最终求出 B 点高程。
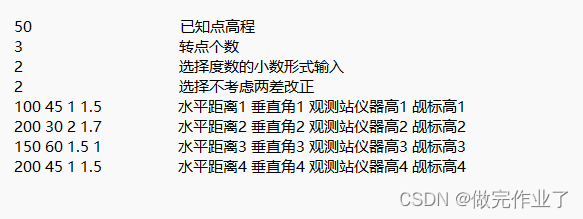
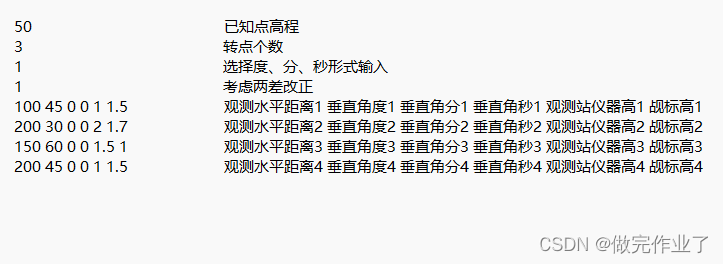
因此在输入的文本文件中,前四行为控制信息,
第一行为已知点 A 的高程;
第二行为转点数目(可以发现当有三个转点时会有四次观测);
第三行为选择角度的输入形式,如果为1,则是以度、分、秒的形式处理,如果为2则以度的小数形式输入;
第四行选择是否考虑两差改正,如果为1则考虑,为2,不考虑。
// 读取起始点A的高程
fscanf(inputFile, "%lf", &height_A);
// 读取转点数目
fscanf(inputFile, "%lf", &num);
// 读取角度形式
fscanf(inputFile, "%d", &num1);
//读取是否考虑两差改正
fscanf(inputFile, "%d", &num2);从第5行开始为每一站的观测值,代码每读取一行则处理一站结果,
如果输入文件第三行控制角度输入形式为1,则第五行开始观测值每行有六个数字,分别为观测的水平距离、度、分、秒、观测站仪器高、觇标高,且每个数字中间以空格分隔。
fscanf(inputFile, "%lf %lf %lf %lf %lf %lf", &guanceS, &du, &fen, &miao, &yiqigao1, &yiqigao2);如果输入文件第三行控制角度输入形式为2,则第五行开始观测值每行有四个数字,分别为观测的水平距离、度的小数形式、观测站仪器高、觇标高,且每个数字中间以空格分隔。
fscanf(inputFile, "%lf %lf %lf %lf", &guanceS, &dushu, &yiqigao1, &yiqigao2);两种不同格式的输入文本文件示例如下:(注意这是两种不同格式的文件)
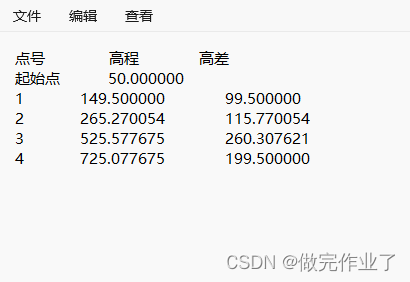
运行程序,输入定义好的文本文件名,则直接在该路径下生成结果文件。

注意:在此处修改输出文件名,当处理多个数据文件时,每次都要对输出文件名进行修改。
而c++批处理代码输出结果文件在此处进行更改:
c语言批处理代码三角高程测量批处理源码(c语言)资源-CSDN文库
c++批处理代码三角高程测量数据批处理源码(c++)资源-CSDN文库
三角高程测量特点:
① 三角高程测量两点距离较远时,应考虑加地球曲率和大气折光影响的改正(两差改正);
② 两点间对向观测高差取平均,能抵消两差影响;
③ 三角高程测量通常组成附合或闭合路线,以检验观测精度;
④ 用电子全站仪进行三角高程测量,能代替三、四等水准测量。
影响三角高程测量精度的因素:
① 竖直角测量误差:竖直角观测时,通过盘左、盘右观测取平均值可以降低仪器误差的影响。
② 边长测量误差:在利用测距仪观测边长时,一定要检测棱镜常数、温度、气压等参数的设置,棱镜常数要与棱镜类型一致,保障测距精度。
③ 仪器高和觇标高测量误差。
④ 大气折光影响:通过直、反觇观测高差,取其平均值作为测量高差,可以降低球气差影响。


















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











