







目录
基本喷油量:是保证发动机在正常的工作温度下运行时有最佳的空燃比。
□整流原理
交流发电机通过 6 只二极管组成的三相桥式整流电路将电枢绕组产生的
三相交流电动势 转变为 直流输出
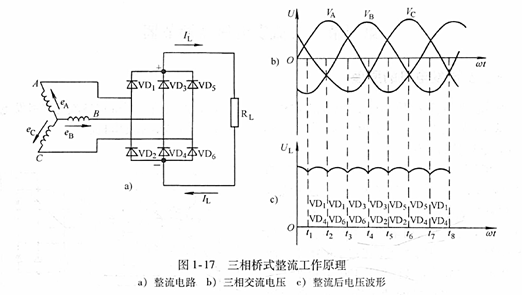
(1) 二极管的整流原理
由于二极管的单向导电性,负极连接在一起的 VD1、VD3、VD5, 在任一瞬时只能是正极电位最高的那只二极管导通,因为该二极管导通后,就使另两只二极管的负极电位高于正极而不能导通;
正极连接在一起的 VD2、VD4、VD6 在任一瞬时则只能是负极电位最低的那只二极管导通,因为该二极管导通后,就使另两只二极管的正极电位低于负极而不能导通。
比如,在 t1 ~ t2时间内,A 相电压最高,B 相电压最低,VD1、VD4导通,电流从 "+" 端流出、"-" 端流人;而在 t2~t3 时间内,A 相电压最高,C 相电压最低,VD1、VD6导通,电流仍然从 "+" 端流出、"-" 端流入。
于是,6 只二极管组成的三相桥式整流电路就将电枢绕组的交流电 (图 1-17b) 变成了直流电 (图 1-17c)。
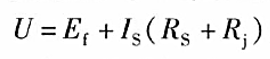
(2) 发电机的端电压
从二极管导通情况可知,在任一时,负载上的电压为某两相
电动势之和 (线电压), 交流发电机输出电压的平均值为
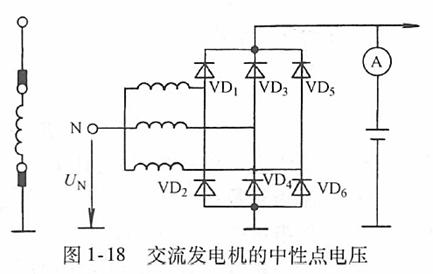
(3)发电机的中性点电压
一些发电机有一个中性点接线柱(N接柱),用于控制磁场继电器、充电指示灯继电器等。N接柱连接三相绕组的中性点(图1-18),其对地电压称之为发电机的中性点电压,由VD2、VD4、VD6的半波整流得到,数值上,发电机的中性点电压是端电压的一半。
□起动机的工作特性
1 转矩特性□
起动机的转矩特性:其电动机所产生的电磁转矩M与其电枢电流Is的关系:M= f (Is)
直流电动机的工作原理中,已知电动机产生的电磁转矩与电枢电流和磁极磁通量成正比
![]()
对于串励式电动机,磁场绕组的励磁电流Ij=Is,而磁极磁通量Φ在磁极未饱和时与励磁电流成正比(Ф=Ij),于是就有
![]()
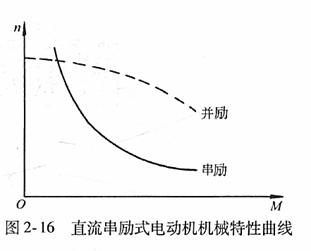
直流串励式电动机的转矩特性曲线如图2-15所示
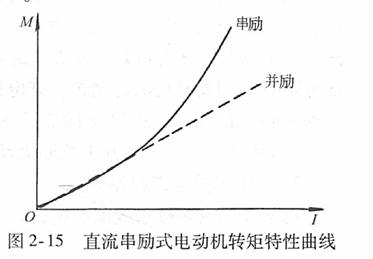
| 在磁极未饱和的情况下 | 串励式直流电动机的电磁转矩M与电枢电流Is平方成正比 |
| 在磁极饱和时 | M才与电枢电流Is成正比 |
| 起动机采用串励式直流电动机原因之一 | |
| 与并励式直流电动机相比,相同Is的情况下,直流串励式电动机可产生较大的电磁转矩 | |
2 机械特性□
| 起动机的机械特性: | 电动机的转速随电磁转矩变化规律: n=f(M) |
| 电枢绕组反电动势的关系式
| 电动机电路电压电流平衡关系式
|
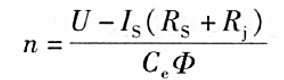
| 直流串励式电动机转速n与Is关系:
串励式电动机在磁极未饱和时,Φ随Is↑而↑,同时Is(Rs+Rj)也↑ 因此,电枢转速n随Is增大下降较快 | |
| 机械特性 | |
| 直流串励式电动机:轻载转速高 | 直流串励式电动机:重载转速低 |
| 在轻载或空载时转速很高,容易造成"飞散"事故,因此,对功率较大的串励式直流电动机,不允许在轻载或空载下运行 | 重载转速低,保证电动机重载启动时不会超出允许的功率而烧毁,使起动安全 起动机采用串励式直流电动机主要原因 |
□电子点火系统的组成与基本原理
1.电子点火系统的基本组成□
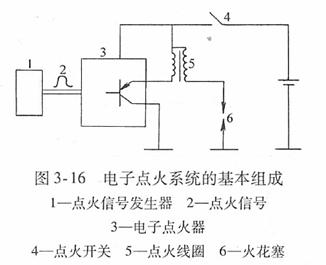
2. 电子点火系统的基本工作原理□
| 当分电器轴转动时,安装在分电器内的点火信号发生器就会产生与发动机曲轴位置 对应的脉冲电压信号 |
| ↓经电子点火器大功率晶体管前置电路处理后 |
| ↓控制大功率开关晶体管的导通或截止,使点火线圈初级电流适时地通断 |
| 输入的电子点火器 的 点火脉冲信号电压使大功率开关晶体管导通时 | 点火线圈初级电路导通,储存点火能量 |
| 当输入电子点火器的点火信号脉冲使开关晶体管截止时 | 点火线圈初级电路断路,次级便产生高压 通过配电器及高压导线等将高压送至火花塞 |
| 相比于触点式点火系统 | ||
| 电子点火系统 | 点火信号发生器 | 替代断电器的凸轮和触点 |
| 大功率开关晶体管 | ||
| 晶体管的导通和截止 | →通断点火线圈初级电流 | |
| 其点火性能和工作的可靠性有了很大的提高 | ||
□旁热翼片式闪光器
旁热翼片式:热胀条 由绕在其上的电热丝通电后产生的热量 加热
| 电热丝 | |
| 一端焊在热胀条上 | 另一端则与动触点相连 |
| 在翼片绷紧时,触点是断开的 | |
|
优点:翼片式闪光器闪光频率较为稳定,其结构简单、体积小 翼片工作时突然伸直和弯曲所发出的弹跳声,还可以从声音上给驾驶人以"转向灯开着"的提示 |
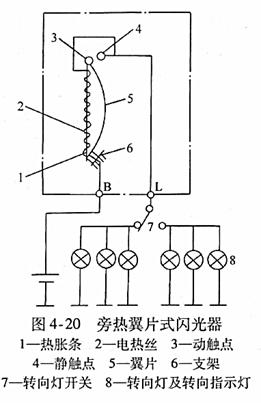
| 接通转向灯开关后 | |
| 电流由蓄电池正极经接线柱B→热胀条1→电热丝2→接线柱L→转向灯开关 →转向灯→搭铁流回蓄电池负极 | |
| 这时,由于电压通过电阻较大的电热丝,其电流很小,灯是暗的。电热丝通电 产生的热量使 热胀条 受热伸长至一定长度时,翼片 在自身弹性力的作用下伸直而使触点闭合。 | |
| 电流由蓄电池正极→接线柱B→翼片5→触点→接线柱L→转向灯开关→转向灯 →搭铁流回蓄电池负极 | |
| 如此循环 转向灯闪烁 | 电热丝被触点短路,转向灯电流增大,转向灯变亮。 被短路后的电热丝不产生热量, 热胀条 便开始冷却收缩,逐渐拉紧翼片,翼片弯曲后又使触点断开,灯又变暗。 |
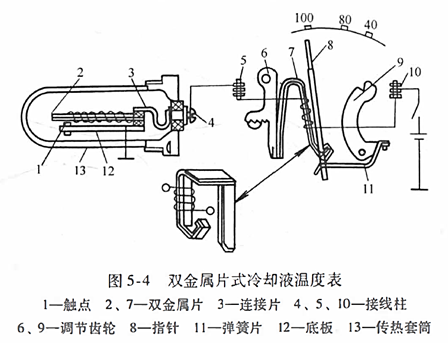
双金属片式发动机冷却液温度表的工作原理□
 □
□
| □ 双金属片式温度传感器的传热套筒 13 置入发动机冷却水道的冷却液中, 发动机冷却液的热量通过传热套筒→传感器内部,使双金属片 2 受热向上弯曲 →因而传感器触点 1 的接触压力会随发动机冷却液温度的↑而↓ | |
→也会使双金属片向上弯曲而使触点断开 | |
| 传感器内的触点不断地张开闭合, 使 冷却液温度表 电路 中形成脉动电流 |
□双金属片式温度指示表与双金属片式油压指示表
| 结构相同,其工作原理也相似 | 仅示值刻度不同 |
| 发动机冷却液温度变化 | |
| 温度较低 | 温度升高 |
| 传感器双金属片2弯曲小 触点初始压力大 | 传感器双金属片2周围温度升高向上弯曲 触点压力降低 |
| 加热线圈通电时间长,直至触点断开 | 加热线圈通电时间短,触点快速断开 |
| 触点断开后,双金属片冷却快 触点迅速闭合 | 触点断开后,双金属片冷却慢 触点闭合慢 |
| 触点闭合时间长 冷却液温度表电路中的电流脉宽较大 | 触点闭合时间短 冷却液温度表电路中的电流脉宽小 |
| 双金属片7受热变形大 指针8偏角大 | 温度表双金属片7变形量减小 指针8偏角小 |
| 指示低温值 | 指示高温值 |
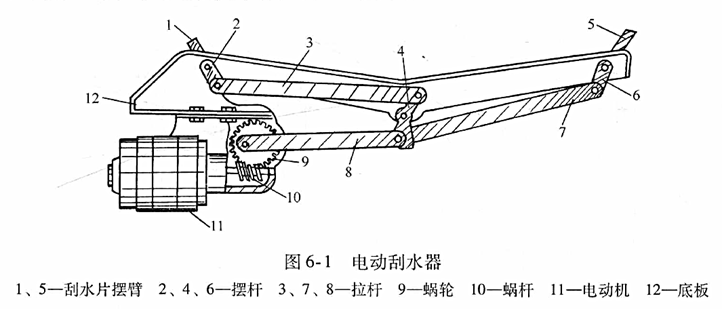
电动刮水器
电动刮水器分类 | |||
| 气动式刮水器 | 电动式刮水器 | ||
| 气动式刮水器只能用于装备气压制动系统的汽车 | 汽车上广泛使用的是电动刮水器 | ||
电动刮水器作用 | |||
| 是清除汽车驾驶室前、后风窗玻璃上面妨碍驾驶人视线的雨水、雾气、雪花及尘埃 | |||
电动刮水器组成 | |||
| 电动机及控制电路 | 传动机构 | 刮水片 | |
电动刮水器基本功能 | |||
| 使刮水片实现摆动 | 变速、间歇摆动 | 自动复位 | |
采用双刮水片的电动刮水器如图6-1所示。
汽车电子控制系统的类型
| 按控制系统控制对象所属汽车部位 | ||
| 发动机电子控制系统 | 点火控制系统 | 燃油喷射控制系统 |
| 发动机怠速控制系统 | 废气再循环控制系统 | |
| 底盘电子控制系统 | 制动防抱死控制系统 | 防滑转电子控制系统 |
| 自动变速器电子控制系统 | 悬架电子控制系统 | |
| 动力转向电子控制系统 | 、、、、 | |
| 车身电子控制系统 | 自动空调系统 | 电子仪表系统 |
| 安全气囊系统 | 汽车巡航控制系统 | |
| 汽车电子防盗系统 | 、、、、 | |
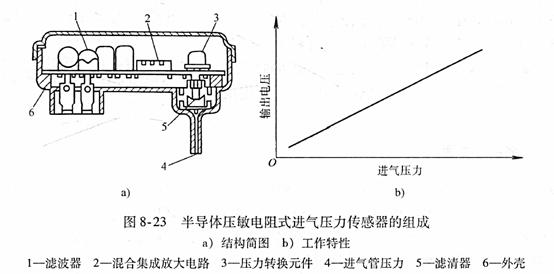
半导体压敏电阻式 进气压力传感器
-
半导体压敏电阻式压力传感器测量原理
利用半导体的 压阻效应 将 压力 转换为相应的 电压信号
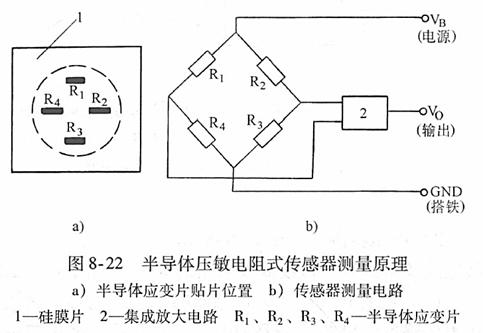
半导体应变片是一种受拉或受压时其电阻值会相应改变的敏感元件。
将应变片贴在硅膜片上,并连接成惠斯顿电桥,当硅膜片受力变形时,各应变片受拉或受压而其电阻发生变化,电桥就会有相应的电压输出。
-
压敏电阻式进气压力传感器结构
| 传感器的压力转换元件 | 硅膜片 |
| 硅膜片受压变形会产生相应的电压信号 | 硅膜片的一面是真空,另一面导入进气管压力 当进气管内的压力变化时,硅膜片的变形量就会随之改变,并产生与进气压力相对应的电压信号。 进气压力越大,硅膜片的变形量也越大,传感器的输出电压大。 |
| 半导体压敏电阻式进气管压力传感器优点 | 线性度好,且具有结构尺寸小、精度高、响应特性好 因此,汽车电子控制系统大都使用这种进气压力传感器。 |
基本喷油量的控制
基本喷油量:是保证发动机在正常的工作温度下运行时有最佳的空燃比。
| 电子控制器 | 发动机转速传感器 | →确定基本喷油量 | |
| 进气压力传感器(压力型)或空气流量传感器(流量型)的电信号 | |||
| 喷油器驱动电路 | →控制喷油器每个工作循环的喷油(通电)时间 | ||
| 基本喷油时间的确定方式 | |||
| 公式计算法 | 查寻插值计算法 | ||
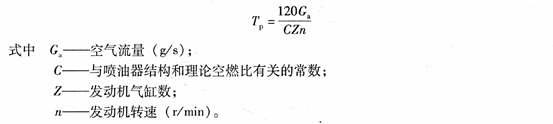
公式计算法确定基本喷油时间
在电子控制器的ROM中,存有基本喷油时间计算模型,工作时,控制器根据当前的
发动机转速和空气流量(或进气压力)参数,利用计算模型计算得到最佳的喷油时间。
基本喷油量的计算模型通常是利用大量的试验数据通过非线性拟合的方式得到,或是利用相关的控制理论建模,再通过优化仿真和实测验证后得到。
公式计算法计算基本喷油时间的计算模型一例如下式所示。
查寻插值计算法确定基本喷油时间
在电子控制器中的ROM存储器储存有特定工况下的最佳喷油时间标准参数,发动机特定工况下的最佳喷油时间是通过试验取得的。
工作时,电子控制器根据当时的发动机转速和空气流量(或进气管压力),从ROM中查寻得到基本喷油时间。如果发动机工作在非特定工况,ECU中的CPU可根据该工况周围的4个特定工况点的基本喷油时间,通过插值法计算得到该工况下的喷油时间。
用查寻插值计算法求得最佳的基本喷油时间,可实现非线性控制,使汽油喷射的控制精度更高,因此,汽油喷射控制系统多采用查寻插值计算法求得基本喷油时间。
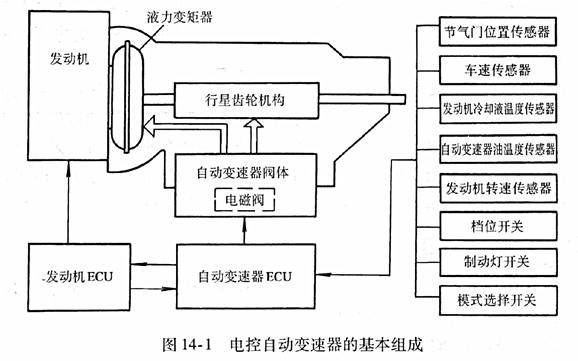
电子控制液力传动式自动变速器的基本组成
| 液力传动 | 液力变矩器通过液力传递动力 将发动机飞轮输出的功率→输送→给齿轮变速器 | |
| 液力变矩器可在一定的范围内实现增矩减速和无级变速,在必要时还可通过其锁止离合器锁止来提高传动效率 | ||
| 机械辅助变速 | 齿轮变速机构 | 作用:进一步增矩减速,通过变换档位实现不同的传动比,以提高汽车的适应能力 目前汽车上多采用四个或五个前进档,一个倒档 |
| 换档执行机构 | ||
| 自动控制 | 电子控制系统 | 自动变速器ECU根据各传感器及有关开关的输入信号产生相应的电控信号控制各电磁阀的动作 ↓ 通过换档阀及阀体中的各油路转换为相应控制油压 ↓ 从而实现对换档执行机构、油压调节装置及液力变矩器锁止装置等的自动控制 |
| 液压控制系统 (自动变速器阀体) | ||
主动空气悬架系统的工作原理
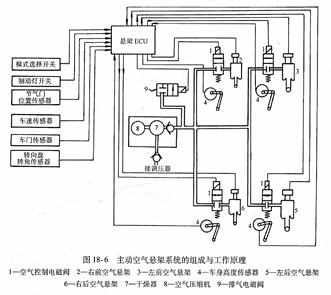
在汽车行驶中,悬架ECU采集各个传感器信号,经过分析运算后
↓
向各执行器发出指令,通过改变空气弹簧的刚度、减振器的阻尼及车身高度的方式
↓
使车辆在行驶过程中车身的姿态改变尽可能小,并在保持良好的操纵稳定性的同时,
将车身振动频率控制在最理想的范围之内
| 汽车载荷减小 | 需减小悬架刚度和降低车身高度,悬架ECU控制排气电磁阀打开,使空气悬架主气室中部分压缩空气排到大气中去,以使空气悬架压缩变形适当,保持车身高度及振动频率在优选值范围内。 |
| 汽车载荷加大 | 需要增加悬架刚度和车身高度,悬架 ECU 控制空气控制电磁阀打开,使压缩空气进入空气悬架主气室,以减小空气弹簧的压缩变形量 并保持车身高度及振动频率仍在优选值范围内。 |
主动式空气悬架系统的动力源:
由直流电动机驱动的空气压缩机产生压缩空气
压缩空气经干燥器干燥后,由空气管道 经 空气控制电磁阀送至各 空气悬架的主气室。
空气弹簧的刚度改变方式:
此外,空气悬架上部的执行器控制着空气弹簧主辅气室之间的连通阀
↓
悬架ECU根据各传感器输入的信号分析计算后
↓
输出控制信号,控制执行器器动作
使空气弹簧主、辅气室之间的连通阀改变主、辅气室的通路情况,以改变空气弹簧的刚度

















 1397
1397

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









