






本文仅代表个人的理解展开叙述,欢迎各位大佬来到评论区交流
IMU(惯性测量单元)在很多嵌入式应用中都发挥着重要作用,特别是在需要精确测量物体姿态(即物体在三维空间中的方向)的场景下,IMU发挥着至关重要的作用。MPU6050作为一款常用的传感器,它集成了加速度计、陀螺仪,并提供高精度的运动数据。本文将通过具体代码和算法步骤,详细探讨如何通过MPU6050获取姿态角,并基于原始数据实现姿态角的解算。
一、 解姿态角的常用方法
旋转表示是三维图形学、机器人学、航空航天等领域的重要内容,三种常用的旋转表示法——欧拉角、轴角和四元数,在数学表达、应用和计算效率等方面都有显著差异。我们将更详细地探讨这些旋转表示的定义、优缺点以及应用场景。
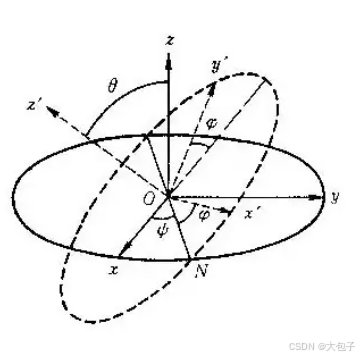
1. 欧拉角(Euler Angles)
欧拉角表示方法通过将物体的旋转分解成绕三轴的旋转来描述姿态。这三轴一般选择为X轴、Y轴和Z轴,每个轴的旋转用一个角度来表示,通常这三个角度分别称为:滚转角(roll)、俯仰角(pitch)和偏航角(yaw)。它们分别代表物体围绕不同轴的旋转。
常见的欧拉角顺序有:
- ZYX顺序:先绕Z轴旋转,再绕Y轴旋转,最后绕X轴旋转(这个顺序常用于飞行器姿态描述)。
- XYZ顺序:先绕X轴旋转,再绕Y轴旋转,最后绕Z轴旋转。
优点:
- 直观易懂:旋转角度与物体的物理姿态有直接关系,因此可以非常直观地理解。例如,飞行器的俯仰、滚转和偏航角就是典型的欧拉角应用。
- 简单易用:描述物体的旋转只需要三个角度,因此非常简洁和易用,尤其适合实时系统中快速描述物体姿态。
- 转换和插值简便:与其他表示方法相比,欧拉角的转换与插值较为直接,常见的转化公式比较简单。
缺点:
-
万向节锁(Gimbal Lock):欧拉角表示的一个显著缺点是可能出现万向节锁。当其中两个旋转轴对齐时,旋转自由度降低,导致某些旋转无法表示,系统会陷入奇异状态。比如,当俯仰角(pitch)接近 ±90° 时,飞行器的偏航角(yaw)和滚转角(roll)无法独立控制。
-
旋转顺序问题:欧拉角的结果与旋转顺序密切相关,改变旋转顺序可能会导致不同的旋转结果。这会使得在不同系统或应用中处理旋转时,产生混乱或不一致的结果。
-
插值复杂:由于万向节锁和旋转顺序的影响,欧拉角的插值方法并不直观,尤其是在旋转过渡时,容易产生不自然的旋转轨迹。
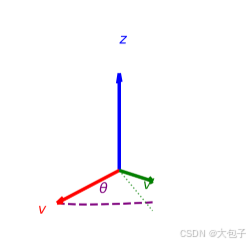
2. 轴角(Axis-Angle)
轴角表示法使用一个单位向量和一个旋转角度来描述旋转。旋转是绕某个固定轴进行的,旋转角度表示旋转的幅度。具体来说,轴角表示由以下两部分组成:
- 旋转轴:一个单位向量,表示旋转的轴线。
- 旋转角度:一个角度 θ,表示围绕旋转轴的旋转角度。
优点:
- 避免万向节锁:轴角表示法没有万向节锁的问题,可以表示任意的三维旋转。
- 简洁高效:旋转轴和角度的两个参数足以完全描述物体的旋转,表示更为简洁。
- 无旋转顺序问题:与欧拉角不同,轴角不受旋转顺序的影响,因此避免了顺序问题,旋转操作更为稳定。
缺点:
- 不直观:轴角的直观性较差。尽管它提供了精确的旋转控制,但理解旋转轴和角度之间的关系对普通用户来说相对困难。
- 计算复杂度:将轴角转换为其他表示方法(如四元数或旋转矩阵)可能需要额外的计算,尤其是在多次旋转组合时,计算复杂度上升。
3. 四元数(Quaternions)
四元数是由四个分量组成的扩展复数,表示为: 其中
是四元数的分量,满足单位四元数的条件
。四元数本质上是一个四维向量,可以非常高效地表示三维空间中的旋转。
优点:
- 避免万向节锁:四元数能够表示任意的三维旋转,并且不会受到万向节锁的影响。
- 高效的旋转运算:四元数的旋转计算非常高效,尤其适用于连续的旋转运算,计算量小且插值精度高(例如SLERP插值法)。
- 数值稳定性:四元数能有效避免数值误差积累,尤其是在多个旋转的连续运算中,保持了高精度和数值稳定性。
缺点:
- 不直观:四元数本质上是数学抽象,缺乏物理直观性。理解四元数如何表示旋转需要一定的数学基础。
- 初始化和转换复杂:从欧拉角、旋转矩阵等其他旋转表示转换为四元数时,需进行较为复杂的数学操作。
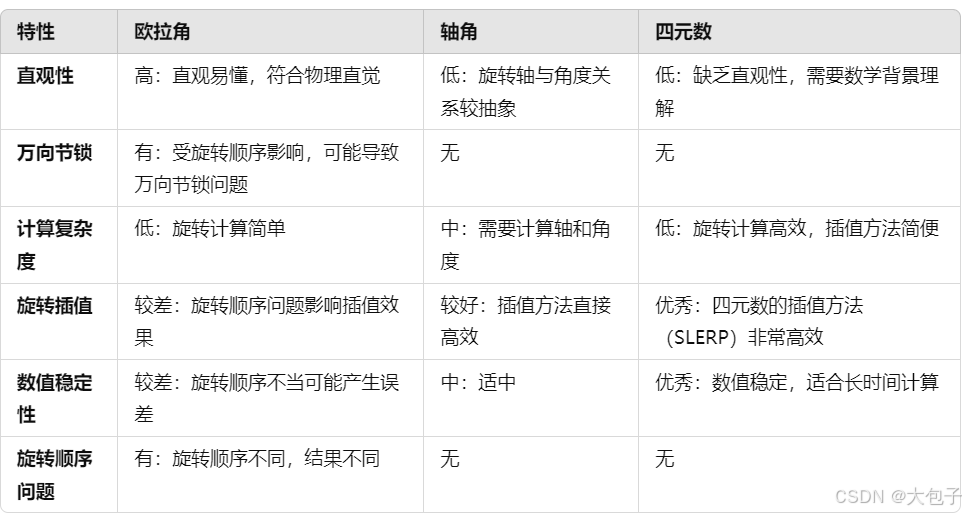
综上所述,我们最终得到的结果如下表所示:
二、 解姿态角的步骤
1.流程图
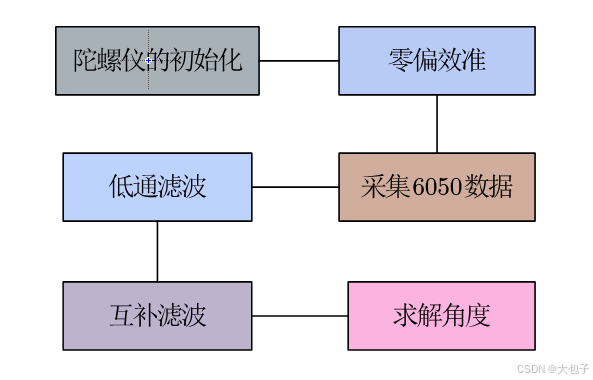
2.代码详例
注:本文章解算运用的是四元数解算
陀螺仪的初始化
// 函数声明
void MPU6050_Init(void);
void I2C_WriteByte(uint8_t addr, uint8_t reg, uint8_t data);
void MPU6050_Init(void) {
// 唤醒MPU6050
I2C_WriteByte(MPU6050_ADDR, MPU6050_PWR_MGMT_1, 0x00);
// 设置采样率(8kHz / (1 + SMPLRT_DIV))
I2C_WriteByte(MPU6050_ADDR, MPU6050_SMPLRT_DIV, 0x07); // 设置为1kHz采样率
// 设置低通滤波器
I2C_WriteByte(MPU6050_ADDR, MPU6050_CONFIG, 0x06); // 低通滤波器设置为5Hz
// 配置陀螺仪,±500°/s
I2C_WriteByte(MPU6050_ADDR, MPU6050_GYRO_CONFIG, 0x08);
// 配置加速度计,±4g
I2C_WriteByte(MPU6050_ADDR, MPU6050_ACCEL_CONFIG, 0x08);
}
void I2C_WriteByte(uint8_t addr, uint8_t reg, uint8_t data) {
// 启动I2C通信
I2C_Start();
// 发送设备地址(写)
I2C_SendByte(addr);
I2C_WaitAck();
// 发送寄存器地址
I2C_SendByte(reg);
I2C_WaitAck();
// 发送数据
I2C_SendByte(data);
I2C_WaitAck();
// 停止I2C通信
I2C_Stop();
}零漂校准
零漂校准的核心作用:
- 消除传感器固有的偏移量;
- 提高测量精度,增强信号可靠性;
- 减少姿态计算的累积误差;
- 准确反映传感器的实际工作状态。
void MPU6050_Calibrate(int16_t *accel_offset, int16_t *gyro_offset) {
// 累加器用于存储加速度计和陀螺仪的总和
int32_t accel_x_sum = 0, accel_y_sum = 0, accel_z_sum = 0;
int32_t gyro_x_sum = 0, gyro_y_sum = 0, gyro_z_sum = 0;
// 用于存储单次读取的加速度和陀螺仪原始数据
int16_t accel_data[3], gyro_data[3];
// 采样的次数,校准结果的准确性与样本数量相关
uint16_t sample_count = 1000;
// 多次采样加速度计和陀螺仪的数据,进行累加
for (uint16_t i = 0; i < sample_count; i++) {
// 读取当前加速度计和陀螺仪的原始数据
// 此函数需要实现,读取加速度x/y/z和陀螺仪x/y/z
MPU6050_ReadRawData(accel_data, gyro_data);
// 累加加速度计的三个轴数据
accel_x_sum += accel_data[0];
accel_y_sum += accel_data[1];
accel_z_sum += accel_data[2];
// 累加陀螺仪的三个轴数据
gyro_x_sum += gyro_data[0];
gyro_y_sum += gyro_data[1];
gyro_z_sum += gyro_data[2];
}
// 计算加速度计的零偏
// 将加速度计x/y/z的总和除以样本数,得到平均值
accel_offset[0] = accel_x_sum / sample_count; // x轴零偏
accel_offset[1] = accel_y_sum / sample_count; // y轴零偏
accel_offset[2] = accel_z_sum / sample_count - 16384; // z轴零偏,减去1g重力加速度
// 计算陀螺仪的零偏
// 将陀螺仪x/y/z的总和除以样本数,得到平均值
gyro_offset[0] = gyro_x_sum / sample_count; // x轴零偏
gyro_offset[1] = gyro_y_sum / sample_count; // y轴零偏
gyro_offset[2] = gyro_z_sum / sample_count; // z轴零偏
}
采集6050数据
#define MPU6050_ADDR 0xD0 // MPU6050的I2C地址(写模式)
#define MPU6050_ACCEL_XOUT_H 0x3B // 加速度计X轴高字节寄存器地址
#define MPU6050_GYRO_XOUT_H 0x43 // 陀螺仪X轴高字节寄存器地址
// 函数声明
void MPU6050_ReadRawData(int16_t *accel_data, int16_t *gyro_data);
int16_t MPU6050_ReadWord(uint8_t reg);
void MPU6050_ReadRawData(int16_t *accel_data, int16_t *gyro_data) {
// 读取加速度计的3个轴数据
accel_data[0] = MPU6050_ReadWord(MPU6050_ACCEL_XOUT_H); // X轴加速度
accel_data[1] = MPU6050_ReadWord(MPU6050_ACCEL_XOUT_H + 2); // Y轴加速度
accel_data[2] = MPU6050_ReadWord(MPU6050_ACCEL_XOUT_H + 4); // Z轴加速度
// 读取陀螺仪的3个轴数据
gyro_data[0] = MPU6050_ReadWord(MPU6050_GYRO_XOUT_H); // X轴角速度
gyro_data[1] = MPU6050_ReadWord(MPU6050_GYRO_XOUT_H + 2); // Y轴角速度
gyro_data[2] = MPU6050_ReadWord(MPU6050_GYRO_XOUT_H + 4); // Z轴角速度
}
int16_t MPU6050_ReadWord(uint8_t reg) {
uint8_t high, low;
// 开始通信并发送寄存器地址
I2C_Start();
I2C_SendByte(MPU6050_ADDR); // 发送MPU6050地址(写模式)
I2C_WaitAck();
I2C_SendByte(reg); // 发送目标寄存器地址
I2C_WaitAck();
// 再次开始通信并切换到读模式
I2C_Start();
I2C_SendByte(MPU6050_ADDR | 0x01); // 发送MPU6050地址(读模式)
I2C_WaitAck();
// 读取高字节数据
high = I2C_ReceiveByte();
I2C_SendAck(); // 发送应答信号
// 读取低字节数据
low = I2C_ReceiveByte();
I2C_SendNack(); // 最后一字节发送非应答信号
I2C_Stop(); // 停止通信
// 合成16位数据,高字节在前,低字节在后
return (int16_t)((high << 8) | low);
}
低通滤波
低通滤波在信号处理中用于减少噪声或平滑数据输出。
一般只对加速度计进行滤波,陀螺仪不滤波
// 定义滤波器系数(范围 0 < alpha <= 1)
#define ALPHA 0.1f // 滤波强度,0.1 为平滑效果较强,数据响应较慢
// 一阶低通滤波函数
float LowPassFilter(float current_input, float previous_output) {
return ALPHA * current_input + (1 - ALPHA) * previous_output;
}
// 示例:应用到MPU6050数据
void ApplyLowPassFilter(int16_t *raw_data, float *filtered_data) {
for (int i = 0; i < 3; i++) {
// 对x、y、z轴分别进行低通滤波
filtered_data[i] = LowPassFilter((float)raw_data[i], filtered_data[i]);
}
}互补滤波
四元数互补滤波原理
-
加速度计更新方向向量:
- 根据加速度计的三轴数据 Ax,Ay,Az,计算出当前设备的方向向量。
- 方向向量用于矫正四元数的漂移。
-
陀螺仪更新旋转速率:
- 根据陀螺仪的三轴角速度 Gx,Gy,Gz,通过积分计算四元数变化。
-
互补滤波融合:
- 结合加速度计的长时间稳定性和陀螺仪的短时间精确性,使用加权系数进行融合:

-
- α是滤波系数,通常取 0.98。
#define GYRO_SENSITIVITY 131.0 // 陀螺仪灵敏度(±250°/s 对应 131)
#define ACCEL_SENSITIVITY 16384.0 // 加速度计灵敏度(±2g 对应 16384)
#define ALPHA 0.98 // 互补滤波系数
// 四元数存储 (q0, q1, q2, q3)
typedef struct {
float q0;
float q1;
float q2;
float q3;
} Quaternion;
// 初始化四元数
Quaternion quat = {1.0f, 0.0f, 0.0f, 0.0f};
// 函数声明
void ComplementaryFilter(int16_t *accel_data, int16_t *gyro_data, Quaternion *q, float dt);
void NormalizeQuaternion(Quaternion *q);
int main() {
int16_t accel_raw[3], gyro_raw[3]; // 存储原始加速度计和陀螺仪数据
float dt = 0.01f; // 假设采样时间间隔为 10ms
while (1) {
// 从 MPU6050 读取原始数据
MPU6050_ReadRawData(accel_raw, gyro_raw);
// 更新四元数
ComplementaryFilter(accel_raw, gyro_raw, &quat, dt);
// 打印结果
printf("Quaternion: q0=%.2f, q1=%.2f, q2=%.2f, q3=%.2f\n", quat.q0, quat.q1, quat.q2, quat.q3);
// 模拟延时
DelayMs(10);
}
}
// 互补滤波更新四元数
void ComplementaryFilter(int16_t *accel_data, int16_t *gyro_data, Quaternion *q, float dt) {
// 加速度计数据转换为重力单位 (g)
float accel_x = accel_data[0] / ACCEL_SENSITIVITY;
float accel_y = accel_data[1] / ACCEL_SENSITIVITY;
float accel_z = accel_data[2] / ACCEL_SENSITIVITY;
// 陀螺仪数据转换为角速度 (°/s)
float gyro_x = gyro_data[0] / GYRO_SENSITIVITY;
float gyro_y = gyro_data[1] / GYRO_SENSITIVITY;
float gyro_z = gyro_data[2] / GYRO_SENSITIVITY;
// 步骤 1: 利用陀螺仪更新四元数
float dq0 = -0.5f * (q->q1 * gyro_x + q->q2 * gyro_y + q->q3 * gyro_z);
float dq1 = 0.5f * (q->q0 * gyro_x - q->q3 * gyro_y + q->q2 * gyro_z);
float dq2 = 0.5f * (q->q3 * gyro_x + q->q0 * gyro_y - q->q1 * gyro_z);
float dq3 = -0.5f * (q->q2 * gyro_x - q->q1 * gyro_y - q->q0 * gyro_z);
// 更新四元数
q->q0 += dq0 * dt;
q->q1 += dq1 * dt;
q->q2 += dq2 * dt;
q->q3 += dq3 * dt;
// 步骤 2: 利用加速度计校正四元数
float norm = sqrt(accel_x * accel_x + accel_y * accel_y + accel_z * accel_z);
accel_x /= norm;
accel_y /= norm;
accel_z /= norm;
float accel_q0 = 0.0f;
float accel_q1 = accel_x;
float accel_q2 = accel_y;
float accel_q3 = accel_z;
// 互补滤波融合
q->q0 = ALPHA * q->q0 + (1 - ALPHA) * accel_q0;
q->q1 = ALPHA * q->q1 + (1 - ALPHA) * accel_q1;
q->q2 = ALPHA * q->q2 + (1 - ALPHA) * accel_q2;
q->q3 = ALPHA * q->q3 + (1 - ALPHA) * accel_q3;
// 步骤 3: 归一化四元数
NormalizeQuaternion(q);
}
// 归一化四元数
void NormalizeQuaternion(Quaternion *q) {
float norm = sqrt(q->q0 * q->q0 + q->q1 * q->q1 + q->q2 * q->q2 + q->q3 * q->q3);
q->q0 /= norm;
q->q1 /= norm;
q->q2 /= norm;
q->q3 /= norm;
}计算角度
如果需要将四元数转换为欧拉角(Roll、Pitch、Yaw),可以使用以下公式:
float roll = atan2(2.0f * (q->q0 * q->q1 + q->q2 * q->q3), 1.0f - 2.0f * (q->q1 * q->q1 + q->q2 * q->q2)) * 180.0f / M_PI;
float pitch = asin(2.0f * (q->q0 * q->q2 - q->q3 * q->q1)) * 180.0f / M_PI;
float yaw = atan2(2.0f * (q->q0 * q->q3 + q->q1 * q->q2), 1.0f - 2.0f * (q->q2 * q->q2 + q->q3 * q->q3)) * 180.0f / M_PI;

















 2854
2854

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









