







EEPROM (Electrically Erasable Programmable read only memory)是指带电可擦可编程只读存储器。是一种掉电后数据不丢失的存储芯片。EEPROM 可以在电脑上或专用设备上擦除已有信息,重新编程。一般用在即插即用。AT24C02是一个2K位串行CMOS E2PROM, 内部含有256个8位字节,CATALYST公司的先进CMOS技术实质上减少了器件的功耗。AT24C02有一个16字节页写缓冲器。该器件通过IIC总线接口进行操作,有一个专门的写保护功能。
一、模块来源
模块实物展示:

二、规格参数
工作电压:1.8V-5.5V
工作电流:最大3mA
通信接口:IIC
内存:2048位
时钟速度:5V时最大1000Khz,其余为400Khz
以上信息见厂家资料文件
三、移植过程
我们的目标是将例程移植至CW32F030C8T6开发板上【能够播报语音的功能】。首先要获取资料,查看数据手册应如何实现读取数据,再移植至我们的工程。
3.1查看资料
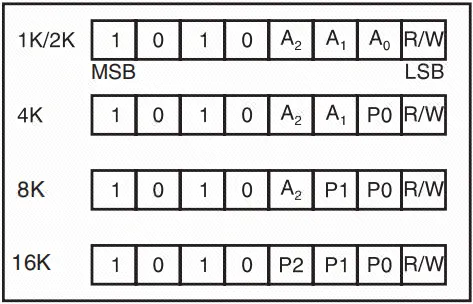
上图是AT24CXX的设备地址(第一行的为AT24C02,它的容量为2K),我们发现AT24CXX整个系列芯片的地址高四位都相同,都是1010,这四位是由生产商固化在芯片内部,无法改变。
AT24C02地址的低三位(不包括读写位)对应芯片的三个引脚,也就是说这三位是可以人为设定的,23=8,所以一条I2C总线上可以挂载8个AT24C02。
AT24C02的地址为7位二进制数,下图中最后一位是读写位(数据方向位),1 表示读数据,0 表示写数据。
这样,7位设备地址加1位读写位,构成I2C的寻址数据。I2C 总线的寻址过程中,通常在起始条件后的第一个字节决定了主机选择哪一个从机,该字节的最后一位决定数据传输方向。
AT24C02读写:AT24C02的存储空间为2K位(256字节),在对其进行写数据时,最小写入单位为字节(Byte),最大写入单位为页(Page),AT24C02页大小为 16 Byte。
字节写
在字节写模式下,主器件发送起始信号和从器件地址信息(R/W 位置零)给从器件,在从器件送回应答信号后,主器件发送 AT24WC01/02/04/08/16 的字节地址,主器件在收到从器件的应答信号后,再发送数据到被寻址的存储单元。AT24WC01/02/04/08/16 再次应答,并在主器件产生停止信号后开始内部数据的擦写,在内部擦写过程中,AT24WC01/02/04/08/16 不再应答主器件的任何请求。

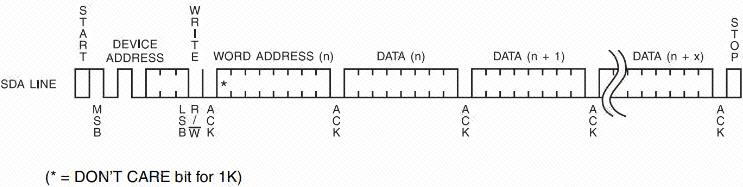
页写
用页写,AT24WC01 可一次写入 8 个字节数据,AT24WC02/04/08/16 可以一次写入 16 个字节的数据,页写操作的启动和字节写一样,不同在于传送了一字节数据后并不产生停止信号,主器件被允许发送 P(AT24WC01 P=7;AT24WC02/04/08/16 P=15)个额外的字节。每发送一个字节数据后 AT24WC01/02/04/08/16 产生一个应答位并将字节地址低位加 1,高位保持不变。
如果在发送停止信号之前主器件发送超过P+1个字节,地址计数器将自动翻转,先前写入的数据被覆盖。
接收到P+1字节数据和主器件发送的停止信号后,AT24CXXX启动内部写周期将数据写到数据区,所有接收的数据在一个写周期内写入AT24WC01/02/04/08/16。
当前地址读
AT24WC01/02/04/08/16 的地址计数器内容为最后操作字节的地址加 1。也就是说 如果上次读/写的操作地址为 N,则立即读的地址从地址 N+1 开始。如果 N=E(这里对 24WC01 E=127;对 24WC02 E=255;对 24WC04 E=511;对 24WC08 E=1023;对 24WC16 E=2047)则计数器将翻转到 0 且继续输出数据。AT24WC01/02/04/08/16 接收到从器件地址信号后(R/W 位置 1),它首先发送一个应答信号,然后发送一个 8 位字节数据。主器件不需发送一个应答信号,但要产生一个停止信号。

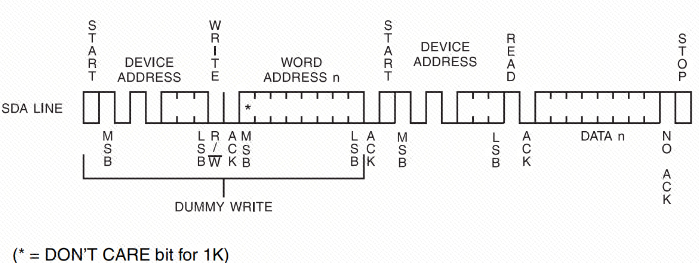
选择读(随机读)
选择性读操作允许主器件对寄存器的任意字节进行读操作,主器件首先通过发送起始信号、从器件地址和它想读取的字节数据的地址执行一个伪写操作。在 AT24WC01/02/04/08/16 应答之后,主器件重新发送起始信号和从器件地址,此时 R/W 位置 1,AT24WC01/02/04/08/16 响应并发送应答信号,然后输出所要求的一个 8 位字节数据,主器件不发送应答信号但产生一个停止信号。
连续读
连续读操作可通过立即读或选择性读操作启动。在 AT24WC01/02/04/08/16 发送完一个 8 位字节数据后,主器件产生一个应答信号来响应,告知 AT24WC01/02/04/08/16 主器件要求更多的数据,对应每个主机产生的应答信号 AT24WC01/02/04/08/16 将发送一个 8 位数据字节。当主器件不发送应答信号而发送停止位时结束此操作。
从 AT24WC01/02/04/08/16 输出的数据按顺序由 N 到 N+1 输出。读操作时地址计数器在 AT24WC01/02/04/08/16 整个地址内增加,这样整个寄存器区域在可在一个读操作内全部读出。当读取的字节超过 E(对于 24WC01 E=127;对 24WC02 E=255; 对 24WC04 E=511;对 24WC08 E=1023;对 24WC16 E=2047)计数器将翻转到零并继续输出数据字节。

3.2引脚选择

模块接线图
3.3移植至工程
移植步骤中的导入.c和.h文件与【CW32模块使用】DHT11温湿度传感器相同,只是将.c和.h文件更改为bsp_at24c02.c与bsp_at24c02.h。这里不再过多讲述,移植完成后面修改相关代码。
在文件bsp_at24c02.c中,编写如下代码。
/*
* Change Logs:
* Date Author Notes
* 2024-06-25 LCKFB-LP first version
*/
#include "bsp_at24c02.h"
#include "stdio.h"
// SLAVE ADDRESS+W为0xA0,SLAVE ADDRESS+R为0xA1
#define AT24C02_ADDRESS_READ 0xA0
#define AT24C02_ADDRESS_WRITE 0xA1
/******************************************************************
* 函 数 名 称:AT24C02_GPIO_Init
* 函 数 说 明:AT24C02的引脚初始化
* 函 数 形 参:无
* 函 数 返 回:无
* 作 者:LC
* 备 注:无
******************************************************************/
void AT24C02_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct; // GPIO初始化结构体
RCC_AT24C02_GPIO_ENABLE(); // 使能GPIO时钟
GPIO_InitStruct.Pins = GPIO_SDA|GPIO_SCL; // GPIO引脚
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD; // 开漏输出
GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; // 输出速度高
GPIO_Init(PORT_AT24C02, &GPIO_InitStruct); // 初始化
}
/******************************************************************
* 函 数 名 称:IIC_Start
* 函 数 说 明:IIC起始时序
* 函 数 形 参:无
* 函 数 返 回:无
* 作 者:LC
* 备 注:无
******************************************************************/
void IIC_Start(void)
{
SDA_OUT();
SDA(1);
delay_us(5);
SCL(1);
delay_us(5);
SDA(0);
delay_us(5);
SCL(0);
delay_us(5);
}
/******************************************************************
* 函 数 名 称:IIC_Stop
* 函 数 说 明:IIC停止信号
* 函 数 形 参:无
* 函 数 返 回:无
* 作 者:LC
* 备 注:无
******************************************************************/
void IIC_Stop(void)
{
SDA_OUT();
SCL(0);
SDA(0);
SCL(1);
delay_us(5);
SDA(1);
delay_us(5);
}
/******************************************************************
* 函 数 名 称:IIC_Send_Ack
* 函 数 说 明:主机发送应答或者非应答信号
* 函 数 形 参:0发送应答 1发送非应答
* 函 数 返 回:无
* 作 者:LC
* 备 注:无
******************************************************************/
void IIC_Send_Ack(unsigned char ack)
{
SDA_OUT();
SCL(0);
SDA(0);
delay_us(5);
if(!ack) SDA(0);
else SDA(1);
SCL(1);
delay_us(5);
SCL(0);
SDA(1);
}
/******************************************************************
* 函 数 名 称:I2C_WaitAck
* 函 数 说 明:等待从机应答
* 函 数 形 参:无
* 函 数 返 回:0有应答 1超时无应答
* 作 者:LC
* 备 注:无
******************************************************************/
unsigned char I2C_WaitAck(void)
{
char ack = 0;
unsigned char ack_flag = 10;
SCL(0);
SDA(1);
SDA_IN();
delay_us(5);
SCL(1);
delay_us(5);
while( (SDA_GET()==1) && ( ack_flag ) )
{
ack_flag--;
delay_us(5);
}
if( ack_flag <= 0 )
{
IIC_Stop();
return 1;
}
else
{
SCL(0);
SDA_OUT();
}
return ack;
}
/******************************************************************
* 函 数 名 称:Send_Byte
* 函 数 说 明:写入一个字节
* 函 数 形 参:dat要写入的数据
* 函 数 返 回:无
* 作 者:LC
* 备 注:无
******************************************************************/
void Send_Byte(uint8_t dat)
{
int i = 0;
SDA_OUT();
SCL(0);//拉低时钟开始数据传输
for( i = 0; i < 8; i++ )
{
SDA( (dat & 0x80) >> 7 );
delay_us(1);
SCL(1);
delay_us(5);
SCL(0);
delay_us(5);
dat<<=1;
}
}
/******************************************************************
* 函 数 名 称:Read_Byte
* 函 数 说 明:IIC读时序
* 函 数 形 参:无
* 函 数 返 回:读到的数据
* 作 者:LC
* 备 注:无
******************************************************************/
unsigned char Read_Byte(void)
{
unsigned char i,receive=0;
SDA_IN();//SDA设置为输入
for(i=0;i<8;i++ )
{
SCL(0);
delay_us(5);
SCL(1);
delay_us(5);
receive<<=1;
if( SDA_GET() )
{
receive|=1;
}
delay_us(5);
}
SCL(0);
return receive;
}
/******************************************************************
* 函 数 名 称:AT24C02_WriteByte
* 函 数 说 明:AT24C02写入一个字节
* 函 数 形 参:WordAddress 要写入字节的地址 Data 要写入的数据
* 函 数 返 回:无
* 作 者:LC
* 备 注:无
******************************************************************/
void AT24C02_WriteByte(unsigned char WordAddress,unsigned char Data)
{
IIC_Start();
Send_Byte(AT24C02_ADDRESS_READ);
I2C_WaitAck();
Send_Byte(WordAddress);
I2C_WaitAck();
Send_Byte(Data);
I2C_WaitAck();
IIC_Stop();
}
/******************************************************************
* 函 数 名 称:AT24C02_ReadByte
* 函 数 说 明:AT24C02读取一个字节
* 函 数 形 参:WordAddress 要读出字节的地址
* 函 数 返 回:读出的数据
* 作 者:LC
* 备 注:无
******************************************************************/
unsigned char AT24C02_ReadByte(unsigned char WordAddress)
{
unsigned char Data;
IIC_Start();
Send_Byte(AT24C02_ADDRESS_READ);
I2C_WaitAck();
Send_Byte(WordAddress);
I2C_WaitAck();
IIC_Start();
Send_Byte(AT24C02_ADDRESS_WRITE);
I2C_WaitAck();
Data=Read_Byte();
IIC_Send_Ack(1);
IIC_Stop();
return Data;
}在文件bsp_at24c02.h中,编写如下代码。
/*
* Change Logs:
* Date Author Notes
* 2024-06-25 LCKFB-LP first version
*/
#ifndef _BSP_AT24C02_H_
#define _BSP_AT24C02_H_
#include "board.h"
//端口移植
#define RCC_AT24C02_GPIO_ENABLE() __RCC_GPIOB_CLK_ENABLE()
#define PORT_AT24C02 CW_GPIOB
#define GPIO_SDA GPIO_PIN_8
#define GPIO_SCL GPIO_PIN_9
//设置SDA输出模式
#define SDA_OUT() { \
GPIO_InitTypeDef GPIO_InitStruct; \
GPIO_InitStruct.Pins = GPIO_SDA; \
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD; \
GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; \
GPIO_Init(PORT_AT24C02, &GPIO_InitStruct); \
}
//设置SDA输入模式
#define SDA_IN() { \
GPIO_InitTypeDef GPIO_InitStruct; \
GPIO_InitStruct.Pins = GPIO_SDA; \
GPIO_InitStruct.Mode = GPIO_MODE_INPUT; \
GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; \
GPIO_Init(PORT_AT24C02, &GPIO_InitStruct); \
}
//获取SDA引脚的电平变化
#define SDA_GET() GPIO_ReadPin(PORT_AT24C02, GPIO_SDA)
//SDA与SCL输出
#define SDA(x) GPIO_WritePin(PORT_AT24C02, GPIO_SDA, (x?GPIO_Pin_SET:GPIO_Pin_RESET) )
#define SCL(x) GPIO_WritePin(PORT_AT24C02, GPIO_SCL, (x?GPIO_Pin_SET:GPIO_Pin_RESET) )
void AT24C02_GPIO_Init(void);
void AT24C02_WriteByte(unsigned char WordAddress,unsigned char Data);
unsigned char AT24C02_ReadByte(unsigned char WordAddress);
#endif四、移植验证
在自己工程中的main主函数中,编写如下。
/*
* Change Logs:
* Date Author Notes
* 2024-06-25 LCKFB-LP first version
*/
#include "board.h"
#include "stdio.h"
#include "bsp_uart.h"
#include "bsp_at24c02.h"
int32_t main(void)
{
unsigned char dat1 = 0;
unsigned char dat2 = 0;
board_init();
uart1_init(115200U);
AT24C02_GPIO_Init();
printf("start\r\n");
//向0地址写入数据48
AT24C02_WriteByte(0,48);
delay_ms(5);
//向8地址写入数据48
AT24C02_WriteByte(8,66);
delay_ms(5);
//从0地址读取数据到dat1
dat1 = AT24C02_ReadByte(0);
delay_ms(5);
//从8地址读取数据到dat2
dat2 = AT24C02_ReadByte(8);
delay_ms(5);
delay_ms(50);
//输出dat查看数据是否正确
printf("dat1 = %d\r\n",dat1);
delay_ms(1);
printf("dat2 = %d\r\n",dat2);
delay_ms(1);
while(1)
{
}
}移植现象:
向0地址写入数据48,再读出查看是否是48。
向8地址写入数据66,再读出查看是否是66。

模块移植成功案例代码:
链接:https://pan.baidu.com/s/1vMkhtubSlSjCLW960FccxQ?pwd=LCKF
提取码:LCKF

















 151
151

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









