硬件:STM32F103C8T6、HC-SR04(超声波)、电位调节器、Ky-008(激光)
项目原理: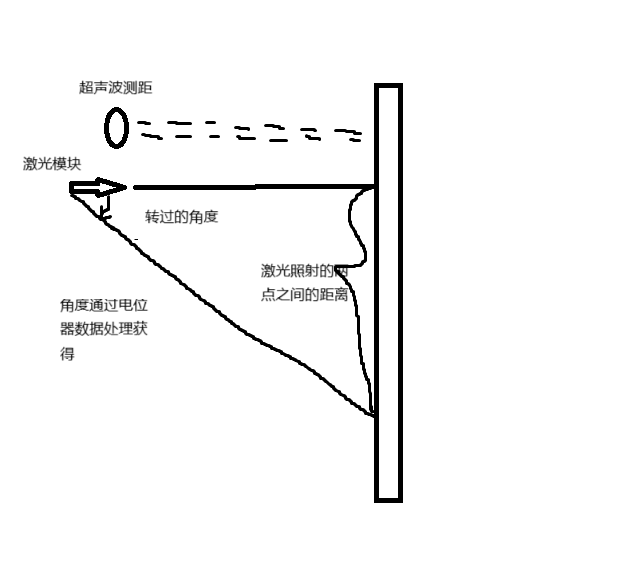
float distance = HC_SR04_GetDistance();//distance就是超声波测距的距离数据,cm
uint16_t Value=ADC_GetValue();//电位器通过ADC,得到的数据
uint16_t angle=270*Value/4096;//270是电位器旋转的角度范围,你们要根据所买电位器角度范围更改
double angle_in_radians = (double)angle * M_PI / 180.0;//C语言中tan()函数的参数为弧度制
double lenth=tan(angle_in_radians)*distance;//结果
代码实现:
HC_SR04.C
#include "HC_SRO4.h"
#include "stm32f10x.h"
#include "DELAY.h"
volatile uint32_t echo_high_time = 0; // 存储高电平持续时间(微秒)
// 外部中断服务函数(Echo引脚)
void EXTI1_IRQHandler(void) {
if (EXTI_GetITStatus(EXTI_Line1) != RESET) {
if (GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_1) == SET) {
// 上升沿:启动定时器
TIM_SetCounter(TIM2, 0);
TIM_Cmd(TIM2, ENABLE);
} else {
// 下降沿:停止定时器并记录时间
echo_high_time = TIM_GetCounter(TIM2);
TIM_Cmd(TIM2, DISABLE);
}
EXTI_ClearITPendingBit(EXTI_Line1);
}
}
// 初始化HC-SR04
void HC_SR04_Init(void) {
GPIO_InitTypeDef GPIO_InitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
EXTI_InitTypeDef EXTI_InitStruct;
TIM_TimeBaseInitTypeDef TIM_InitStruct;
// 1. 使能时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
// 2. 配置Trig引脚(PA0)为输出
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
// 3. 配置Echo引脚(PA1)为输入,并启用外部中断
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU; // 上拉输入
GPIO_Init(GPIOA, &GPIO_InitStruct);
// 4. 配置外部中断
GPIO_EXTILineConfig(GPIO_PortSourceGPIOA, GPIO_PinSource1);
EXTI_InitStruct.EXTI_Line = EXTI_Line1;
EXTI_InitStruct.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStruct.EXTI_Trigger = EXTI_Trigger_Rising_Falling; // 上升沿和下降沿触发
EXTI_InitStruct.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStruct);
// 5. 配置NVIC
NVIC_InitStruct.NVIC_IRQChannel = EXTI1_IRQn;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0x0F;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0x0F;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStruct);
// 6. 配置TIM2(1微秒计数,72MHz/72 = 1MHz)
TIM_InitStruct.TIM_Prescaler = 72 - 1; // 分频后时钟1MHz
TIM_InitStruct.TIM_CounterMode = TIM_CounterMode_Up;
TIM_InitStruct.TIM_Period = 0xFFFF; // 最大计数值
TIM_InitStruct.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM2, &TIM_InitStruct);
TIM_Cmd(TIM2, DISABLE); // 初始状态关闭
}
// 触发测距并返回距离(单位:厘米)
float HC_SR04_GetDistance(void) {
float distance = 0.0f;
// 1. 发送10us高电平触发信号
GPIO_SetBits(GPIOA, GPIO_Pin_0);
Delay_us(15); // 需实现微秒级延时(或使用定时器)
GPIO_ResetBits(GPIOA, GPIO_Pin_0);
// 2. 等待回波信号(超时处理)
uint32_t timeout = 1000000; // 约1秒超时
while (echo_high_time == 0 && timeout--);
// 3. 计算距离(时间微秒 * 声速(340m/s) / 2)
if (echo_high_time > 0) {
distance = (echo_high_time * 0.0343) / 2.0f; // 单位:厘米
echo_high_time = 0; // 清零标志
}
return distance;
}
HC_SR04.H
#ifndef HC_SR04_H
#define HC_SR04_H
#include "stm32f10x.h"
void HC_SR04_Init(void);
float HC_SR04_GetDistance(void);
#endif
adc.c(电位器数据读取)
#include "stm32f10x.h"
void MY_ADC_Init(void)
{
//开启时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE );
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1,ENABLE );
//adc预分频,最高14MHz,这里6分频:72/6=12M
RCC_ADCCLKConfig(RCC_PCLK2_Div6);
//配置PA2为模拟输入模式
GPIO_InitTypeDef GPIO_InitStructrue;
GPIO_InitStructrue.GPIO_Mode=GPIO_Mode_AIN;
GPIO_InitStructrue.GPIO_Pin=GPIO_Pin_2;
GPIO_InitStructrue.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructrue);
//选择规则组输入通道
ADC_RegularChannelConfig(ADC1,ADC_Channel_2,1,ADC_SampleTime_41Cycles5);
//配置ADC
ADC_InitTypeDef ADC_InitStructrue;
ADC_InitStructrue.ADC_ContinuousConvMode=ENABLE;
ADC_InitStructrue.ADC_DataAlign=ADC_DataAlign_Right;
ADC_InitStructrue.ADC_ExternalTrigConv=ADC_ExternalTrigConv_None;//触发源
ADC_InitStructrue.ADC_Mode=ADC_Mode_Independent;
ADC_InitStructrue.ADC_NbrOfChannel=1;//扫描模式下的通道数目
ADC_InitStructrue.ADC_ScanConvMode=ENABLE;
ADC_Init(ADC1,&ADC_InitStructrue);
//使能adc
ADC_Cmd(ADC1,ENABLE );
//校准
ADC_ResetCalibration(ADC1);
while (ADC_GetResetCalibrationStatus(ADC1));
ADC_StartCalibration(ADC1);
while (ADC_GetCalibrationStatus(ADC1));
}
uint16_t ADC_GetValue(void) {
// 启动ADC转换
ADC_SoftwareStartConvCmd(ADC1, ENABLE);
// 等待转换完成
while (ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC) == RESET);
// 读取转换结果
return ADC_GetConversionValue(ADC1);
}
adc.h
#ifndef adc_H
#define adc_H
#include "stm32f10x.h"
void MY_ADC_Init(void);
uint16_t ADC_GetValue(void);
#endif
ky_008.c(激光)
#include "stm32f10x.h"
void Ky_008_Init(void)
{
//开启时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE );
//配置PA3为推挽输出模式
GPIO_InitTypeDef GPIO_InitStructrue;
GPIO_InitStructrue.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStructrue.GPIO_Pin=GPIO_Pin_3;
GPIO_InitStructrue.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructrue);
}
ky_008.h
#ifndef ky_008_H
#define ky_008_H
#include "stm32f10x.h"
void Ky_008_Init(void);
#endif
USART.c
#include "stm32f10x.h"
#include "stdio.h"
//串口初始化函数
void MY_USART_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE );
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE );
//PA9,复用推挽输出
GPIO_InitTypeDef GPIO_UsartTX_Initstruct;
GPIO_UsartTX_Initstruct.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_UsartTX_Initstruct.GPIO_Pin=GPIO_Pin_9;
GPIO_UsartTX_Initstruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_UsartTX_Initstruct);
//PA10,浮空输出
GPIO_InitTypeDef GPIO_UsartRX_Initstruct;
GPIO_UsartRX_Initstruct.GPIO_Mode=GPIO_Mode_IN_FLOATING;
GPIO_UsartRX_Initstruct.GPIO_Pin=GPIO_Pin_10;
GPIO_UsartRX_Initstruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_UsartRX_Initstruct);
//配置USART参数
USART_InitTypeDef USART_Initstruct;
USART_Initstruct.USART_BaudRate=115200;//波特率
USART_Initstruct.USART_HardwareFlowControl=USART_HardwareFlowControl_None;//流控
USART_Initstruct.USART_Mode=USART_Mode_Tx|USART_Mode_Rx;//发送或者接收模式(可以都选)
USART_Initstruct.USART_Parity=USART_Parity_No;//校验
USART_Initstruct.USART_StopBits=USART_StopBits_1;//停止位
USART_Initstruct.USART_WordLength=USART_WordLength_8b;//字长
USART_Init(USART1,&USART_Initstruct);
USART_Cmd(USART1,ENABLE );
}
//发送数据函数
void USART1_SendByte(uint8_t byte) {
USART_SendData(USART1,byte);
while (USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);
}
//串口重定向
int fputc(int ch, FILE *f)
{
USART_SendData(USART1, (uint8_t) ch);
while (USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);
return ch;
}
USART.h
#ifndef __USART_H
#define __USART_H
#include "stdio.h"
void MY_USART_Init(void);
void USART1_SendByte(uint8_t byte);
int fputc(int ch, FILE *f);
#endif
main.c
#include "stm32f10x.h" // Device header
#include "HC_SRO4.h"
#include "USART.h"
#include "DELAY.h"
#include "adc.h"
#include "ky_008.h"
#include <math.h>
#include "stdio.h"
#define M_PI 3.1415926
int main()
{
MY_USART_Init();
HC_SR04_Init();
MY_ADC_Init();
Ky_008_Init();
while (1) {
float distance = HC_SR04_GetDistance();
uint16_t Value=ADC_GetValue();
uint16_t angle=270*Value/4096;
double angle_in_radians = (double)angle * M_PI / 180.0;
if (angle==0)
{
GPIO_SetBits(GPIOA,GPIO_Pin_3);
}
double lenth=tan(angle_in_radians)*distance;
printf("长度为:%f\n",lenth);
Delay_ms(200); // 200ms测量一次
}
}
总结:总体来说比较简单,当个练手的小玩具吧
























 684
684

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









