






基于51单片机避障小车
(仿真+程序)
功能介绍
具体功能:
1.四驱车的底盘,双直流电机,一只驱动左边两轮,一只驱动右边两轮;
2.配两个红外对管,一直装在小车前方,一只装在小车底盘,分别检测前方障碍和台阶;
3.小车碰到前方障碍后,左边两轮停止,右轮驱动,实现转弯。碰到台阶后小车先后退,然后左轮停止,右轮驱动实现转弯, 转弯结束后小车继续前进,如此循环;
演示视频:
基于51单片机避障小车
 添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
程序
/* 双直流电机,一只驱动左边两轮,一只驱动
右边两轮。驱动电压为4.5-9V,配两个红外对管,打算一直装在小车前方
,一只装在小车底盘,分别检测前方障碍和台阶,小车碰到前方障碍后
左边两轮停止,右轮驱动,实现转弯。碰到台阶后小车先后退,然后左轮
停止,右轮驱动实现转弯,转弯结束后小车继续前进,如此循环*/
/***公众号:木子单片机****
************************************/
#include<reg52.h>
#define uchar unsigned char
#define uint unsigned int
uchar cs1,cs2,num1,num2;
uchar code table[]={0,1}; //占空比50%
sbit qdg=P3^4; //前红外对管,检测小车前方障碍
sbit xdg=P3^5; //下红外对管,检测小车是否碰到台阶
sbit in1=P1^0; //L298输入
sbit in2=P1^1; //L298输入
sbit in3=P1^2; //L298输入
sbit in4=P1^3; //L298输入
sbit ena=P1^4; //L298输入使能A
sbit enb=P1^5; //L298输入使能B
void delay(int z) //延时函数
{
uint x,y;
for(x=z;x>0;x--)
for(y=110;y>0;y--);
}
void init() //初始化函数
{
TMOD=0x11;
TH0=(65536-500)/256;
TL0=(65536-500)%256;
ET0=1;
TR0=1;
EA=1;
}
硬件设计
使用元器件:
单片机:AT89C52;
(注意:单片机是通用的,无论51还是52、无论stc还是at都一样,引脚功能都一样。程序也是一样的。)
设计资料
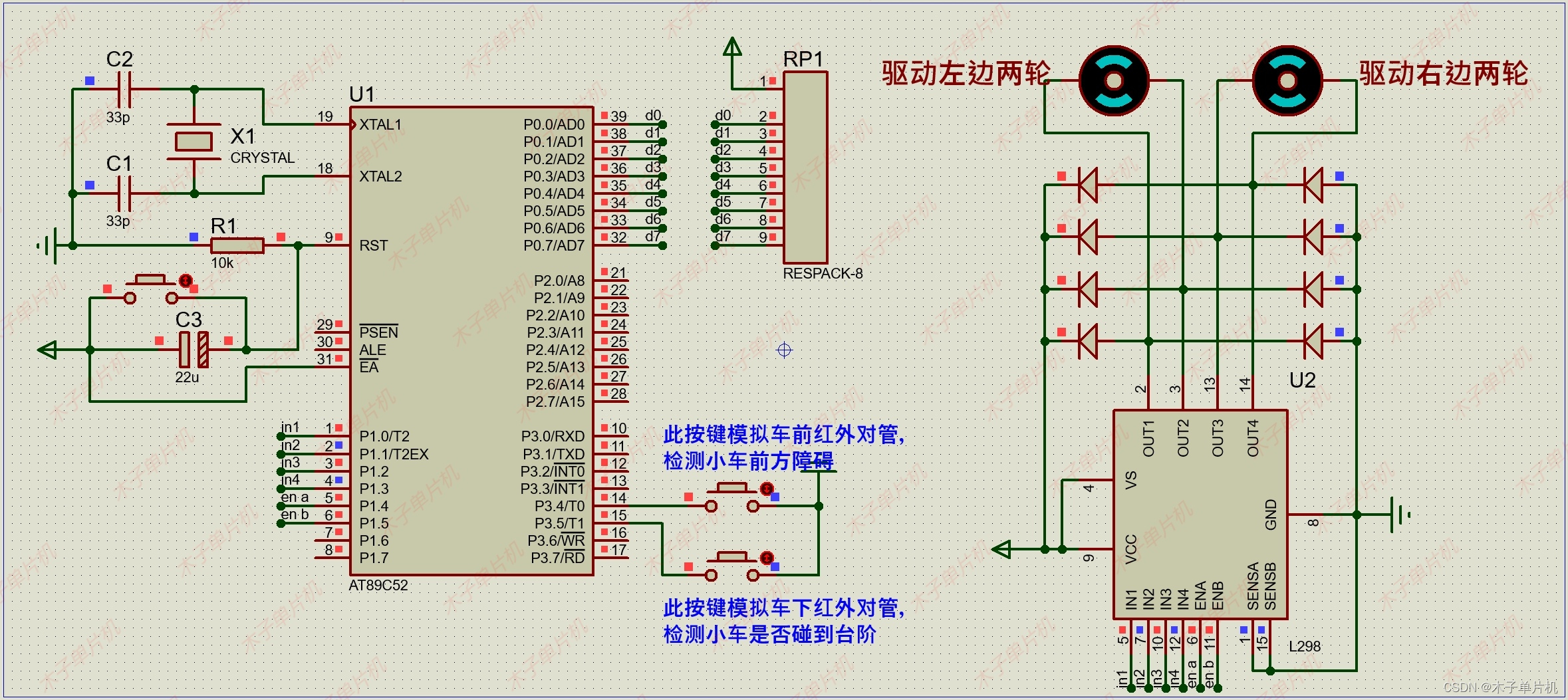
01仿真图
本设计使用proteus7.8和proteus8.9两个版本设计!具体如图!
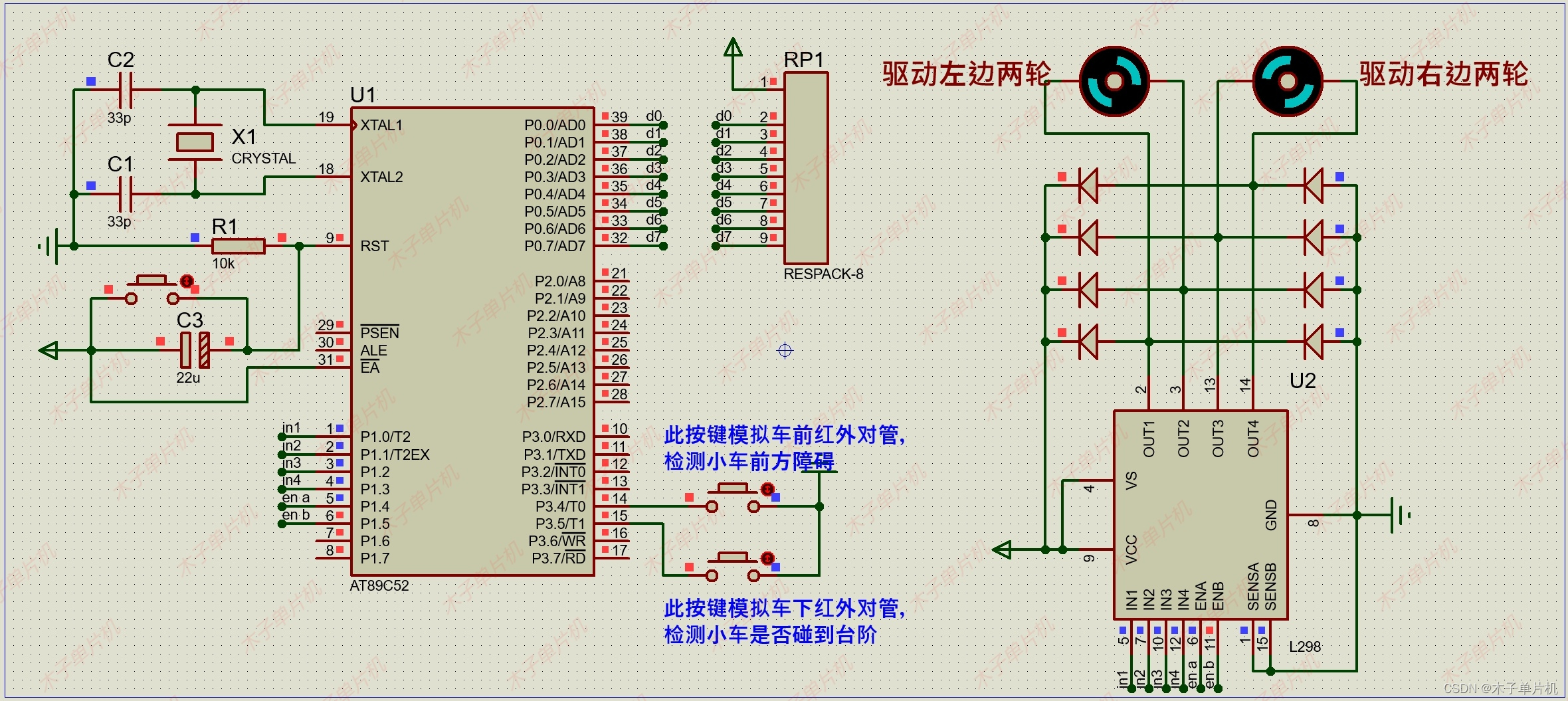 添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
02程序
本设计使用软件keil5版本编程设计!具体如图!
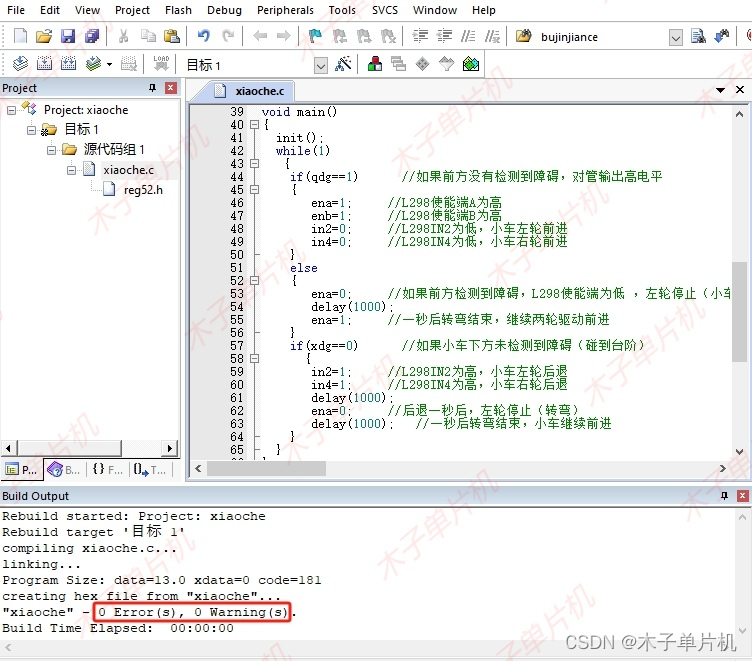 添加图片注释,不超过 140 字(可选)
添加图片注释,不超过 140 字(可选)
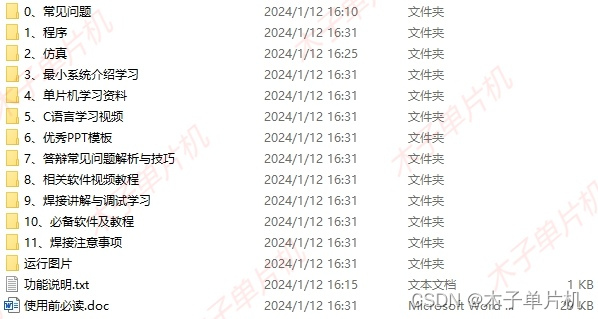
03设计资料
资料获取请关注同名公众号,全部资料包括程序(含注释)、仿真源文件等。具体内容如下,全网最全!!
可以关注下方公众号!
点赞分享一起学习成长。















 6076
6076











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









