







STM32 的代码其实就是简单的UART串口通讯代码,但实质上是有很多坑!!!作者发现大部分博主并没有说明出坑所在,这部分作者将会为读者朋友把可能出现的坑给解决掉!
3.1 树莓派4B代码
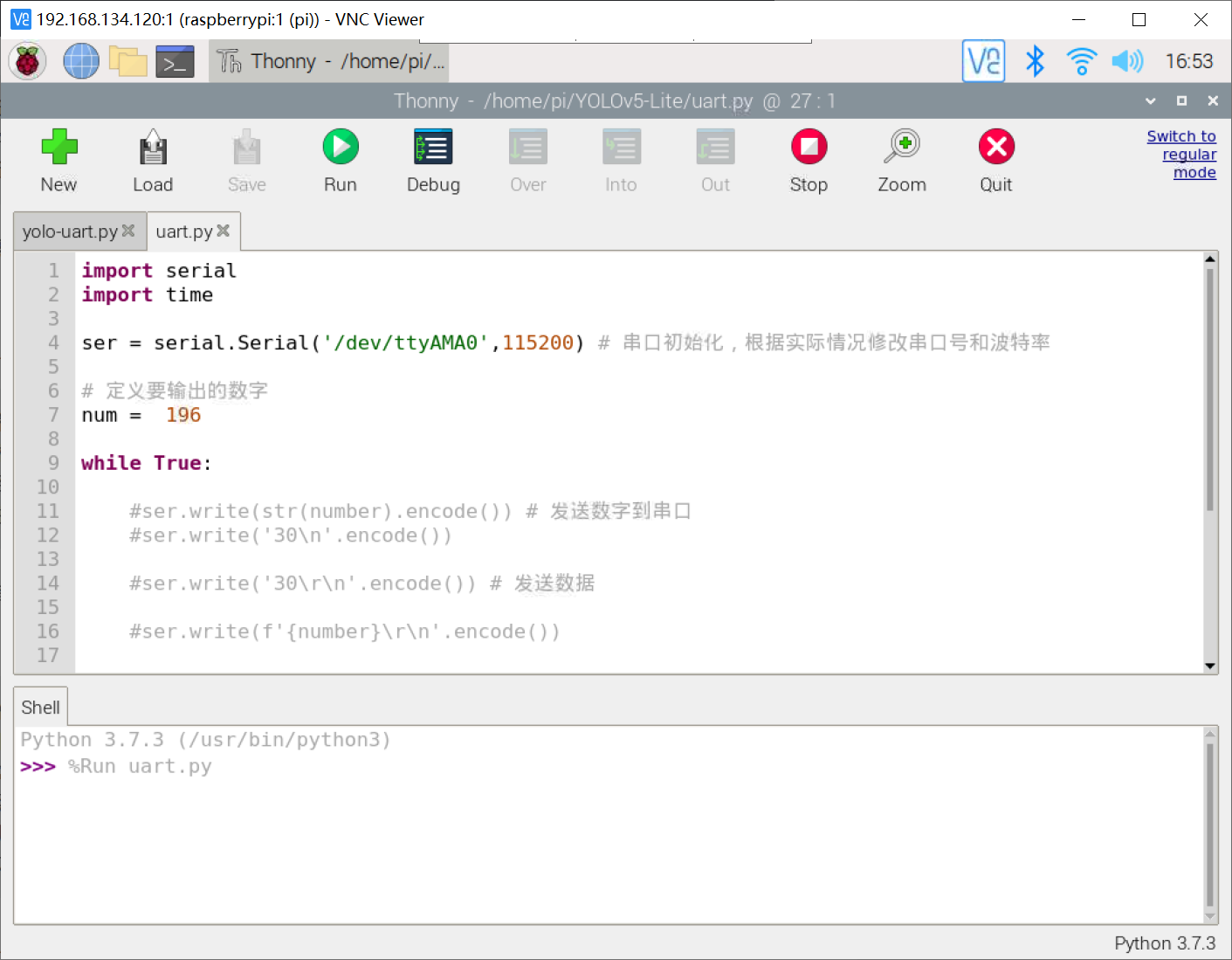
我们利用 Python 代码写一个循环发送数字的代码程序,具体代码如下:
import serial
import time
ser = serial.Serial('/dev/ttyAMA0',115200) # 串口初始化,根据实际情况修改串口号和波特率
# 定义要输出的数字
num = 196
while True:
ser.write(str(int(num)).encode()) # 发送数字到串口
num += 1
if num > 205:
num = 196
time.sleep(0.2) # 等待1秒钟
可以看出代码是非常简单的,但是这里读者朋友需要注意的是树莓派4B的端口发送至STM32的其实都是字符串流!在STM32端我们对发送过来的字符串流进行解码(很多博主其实都没有说明该点,导致很多朋友解码失败)!
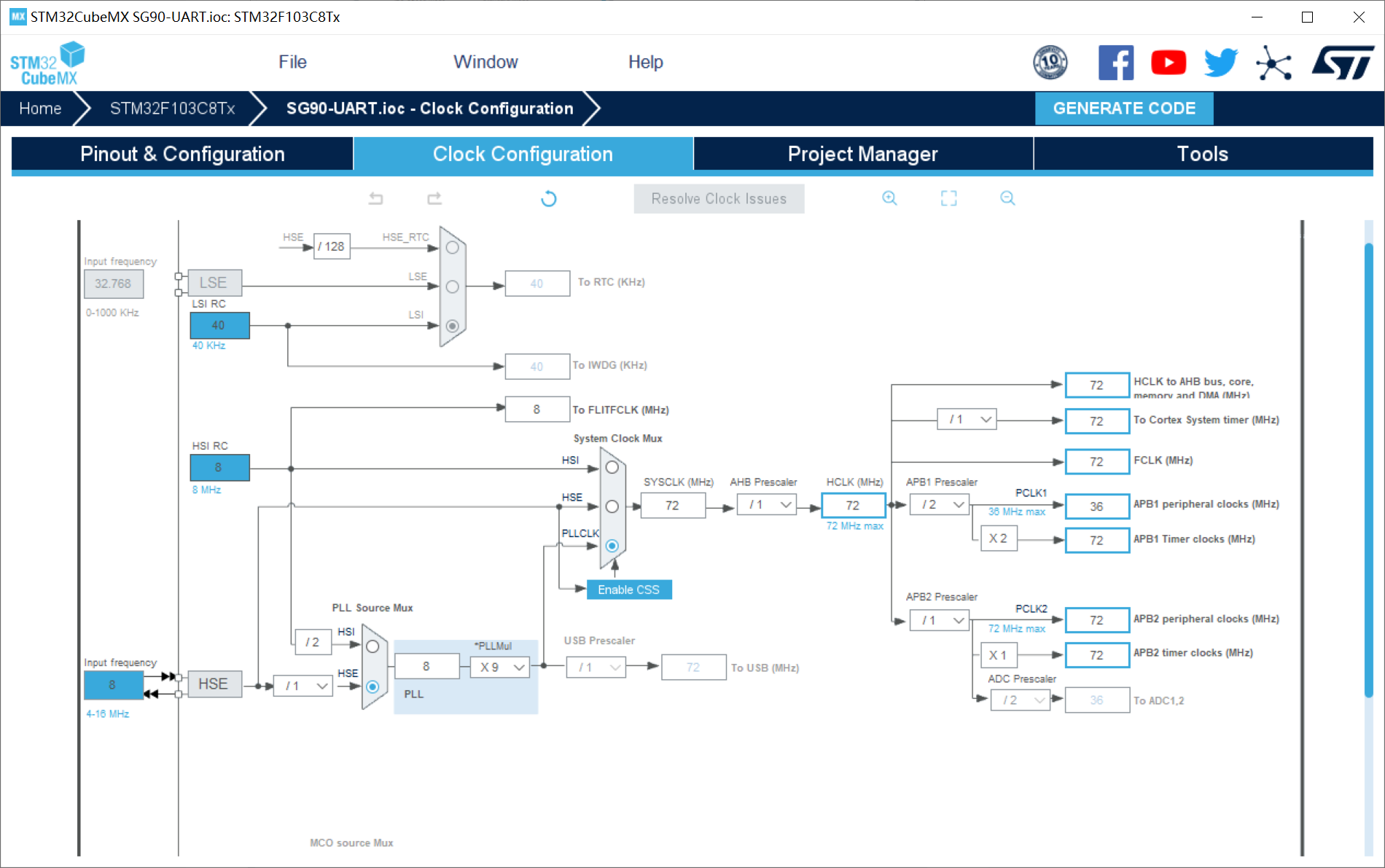
3.2 CubeMX配置
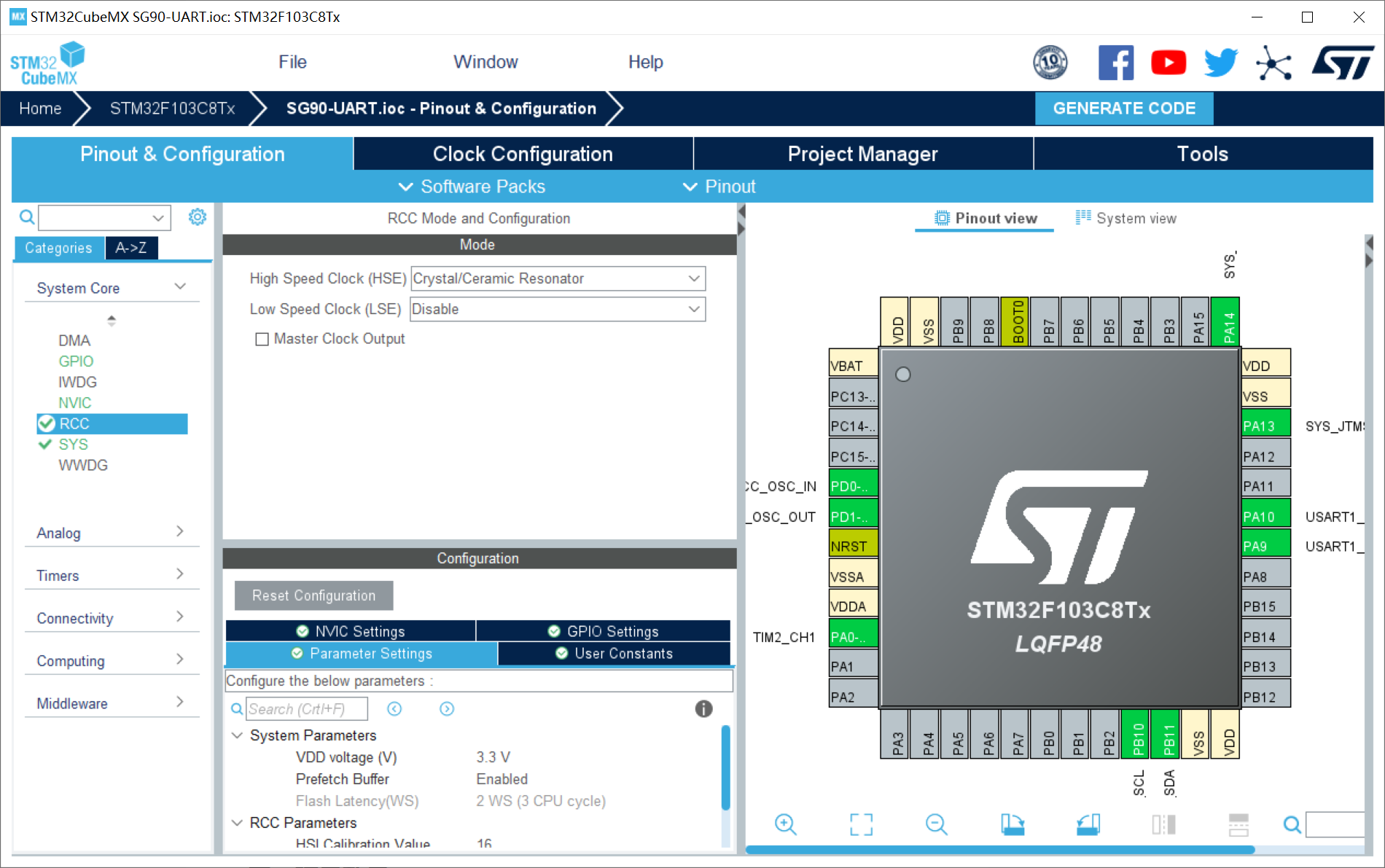
1、RCC配置外部高速晶振(精度更高)——HSE;
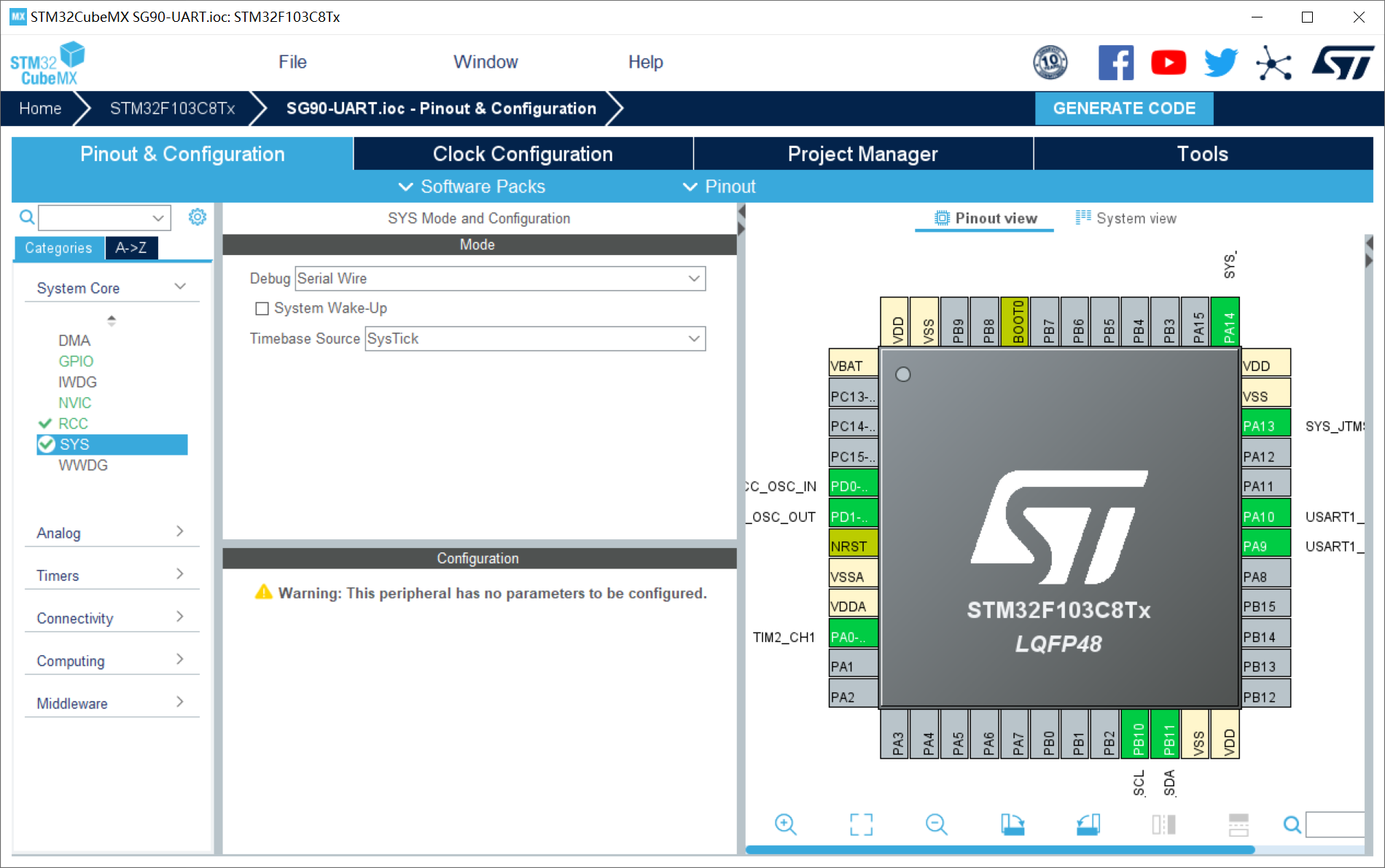
2、SYS配置:Debug设置成Serial Wire(否则可能导致芯片自锁);
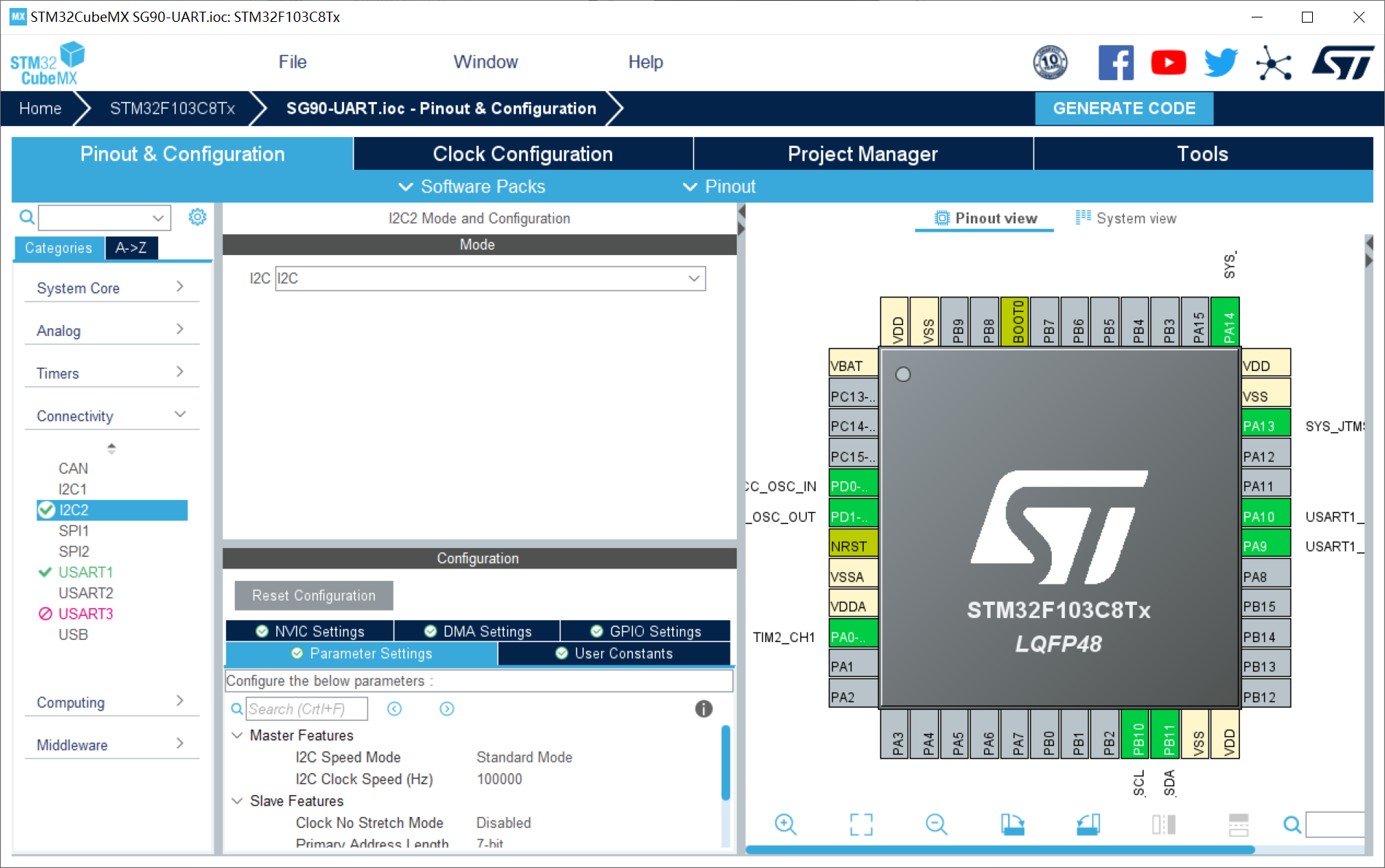
3、I2C配置:
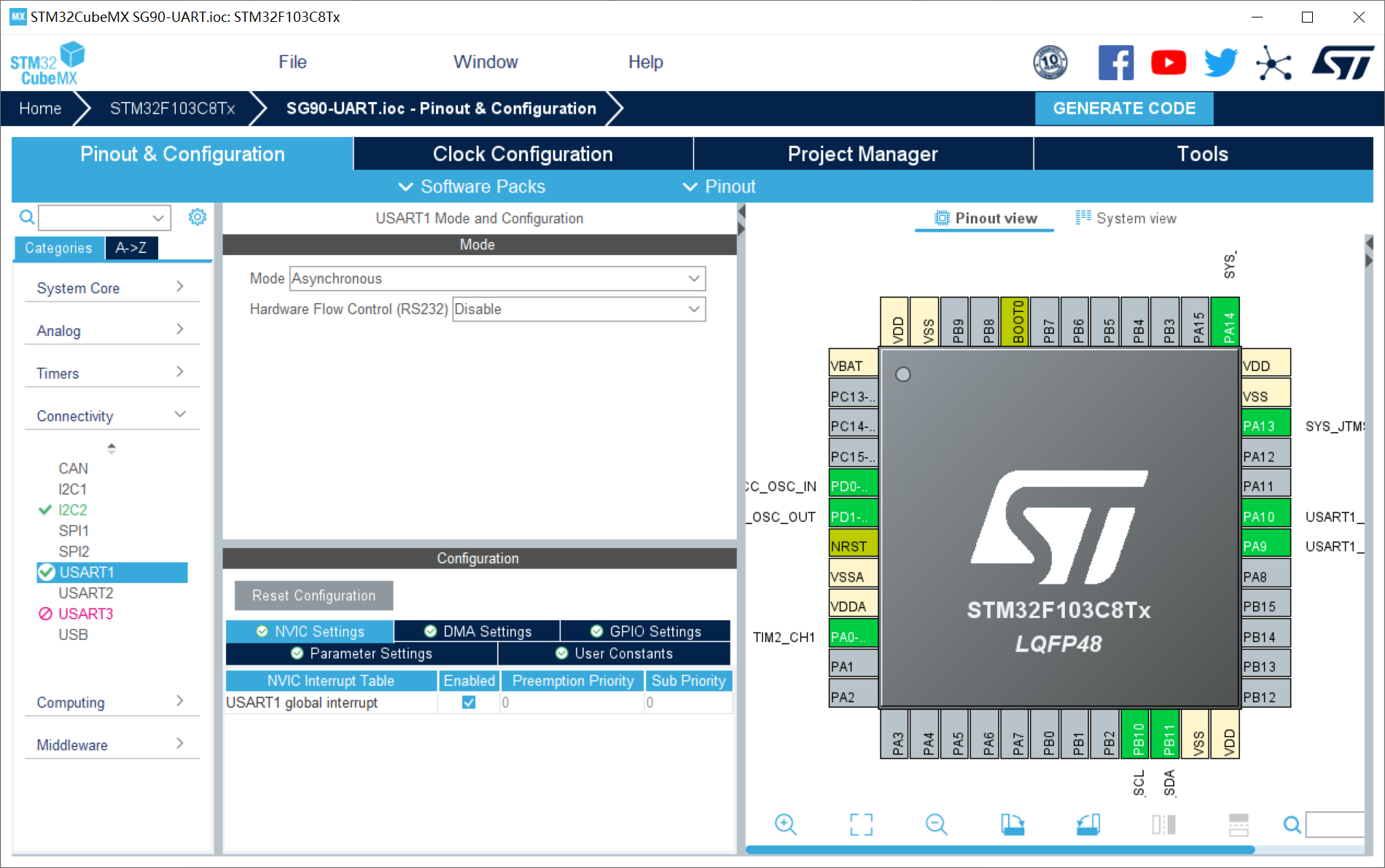
4、USART1配置:设置UART1串口;波特率:115200;开启UART串口中断;
5、时钟树配置
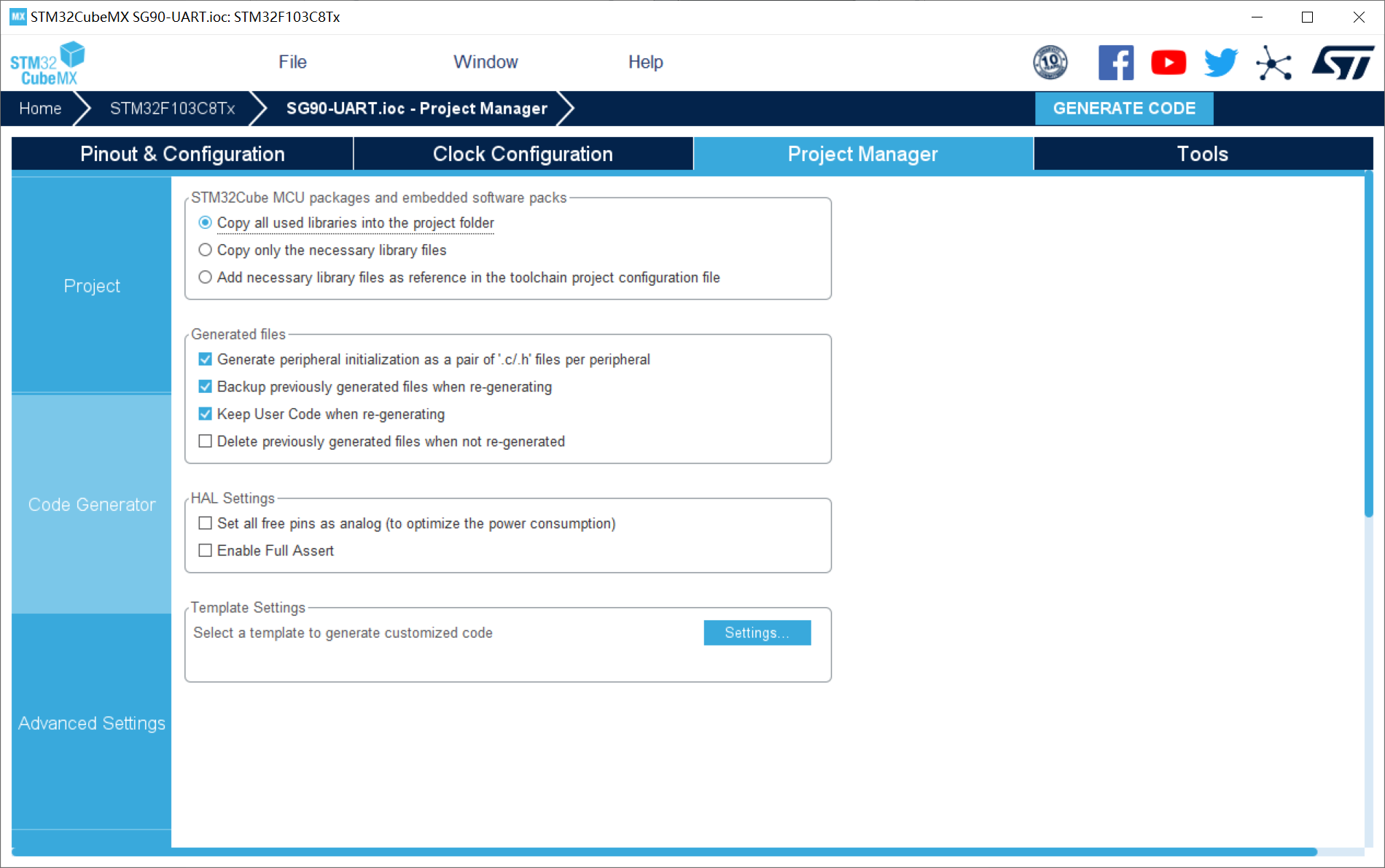
6、工程配置
3.3 STM32代码
3.3.1 OLED代码
OLED模块主要是方便显示树莓派4B发送给STM32的数据信息!考虑到实际情况,我们一般需要根据树莓派4B发送过来的数字信息,所以,我们这里利用OLED进行数字显示!
小数显示API函数:
//z_len为整数显示位数,f_len为小数显示位数,size2为字体大小
void OLED_Showdecimal(u8 x,u8 y,float num,u8 z_len,u8 f_len,u8 size2)
{
u8 t,temp;
u8 enshow;
int z_temp,f_temp;
z_temp=(int)num;
//整数部分
for(t=0;t<z_len;t++)
{
temp=(z_temp/oled_pow(10,z_len-t-1))%10;
if(enshow==0 && t<(z_len-1))
{
if(temp==0)
{
OLED_ShowChar(x+(size2/2)*t,y,' ',size2);
continue;
}
else
enshow=1;
}
OLED_ShowChar(x+(size2/2)*t,y,temp+'0',size2);
}
//小数点
OLED_ShowChar(x+(size2/2)*(z_len),y,'.',size2);
f_temp=(int)((num-z_temp)*(oled_pow(10,f_len)));
//小数部分
for(t=0;t<f_len;t++)
{
temp=(f_temp/oled_pow(10,f_len-t-1))%10;
OLED_ShowChar(x+(size2/2)*(t+z_len)+5,y,temp+'0',size2);
}
}
篇幅有限,OLED参考博客:http://t.csdn.cn/kydg4
3.3.2 UART代码
这部分代码是比较核心的,上述博客作者已经说明了,其实树莓派4B发送给STM32的数据都是以字符串流的格式发送来得。所以,即使发送过来的是数字数据也会变成字符,这就需要我们进行解码!
uart.h:
#ifndef __UART_H
#define __UART_H
#include "stm32f1xx_hal.h"
extern UART_HandleTypeDef huart1;
#define USART1_REC_LEN 600
extern int USART1_RX_BUF[USART1_REC_LEN];
extern uint16_t USART1_RX_STA;
extern int USART1_NewData;
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart);
#endif
uart.c:
#include "uart.h"
#include "oled.h"
int USART1_RX_BUF[USART1_REC_LEN]; //目标数据
uint16_t USART1_RX_STA=2;
int USART1_NewData;
extern int num; //百位
extern int num2; //十位
extern int num3; //个位
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart ==&huart1)
{
USART1_RX_BUF[USART1_RX_STA&0X7FFF]=USART1_NewData;
USART1_RX_STA++;
if(USART1_RX_STA>(USART1_REC_LEN-1))USART1_RX_STA=0;
//num = USART1_RX_BUF[USART1_RX_STA];
HAL_UART_Receive_IT(&huart1,(uint8_t *)&USART1_NewData,1);
num = USART1_RX_BUF[USART1_RX_STA-1];
num2 = USART1_RX_BUF[USART1_RX_STA-2];
num3 = USART1_RX_BUF[USART1_RX_STA-3];
}
}
上述UART代码,利用 UART 中断函数进行读取 USART1_NewData 的数值,因为我们最大传输的数字为3位数,所以我们分别读取缓存数组中最近的 3 个字节数据(树莓派4B发送过来的是字符串,也就是被转换成了对应数字的ASCII数值,例如:发送过来100,则STM32端接收到的为49 49 48 这3个字节)。
3.3.3 数据解码代码
control.c:
#include "control.h"
#include "uart.h"
#include "tim.h"
#include "oled.h"
int num;
int num2;
int num3;
int value;
int flag;
int last;
void TargetTracking()
{
flag = USART1_RX_STA - last;
last = USART1_RX_STA;
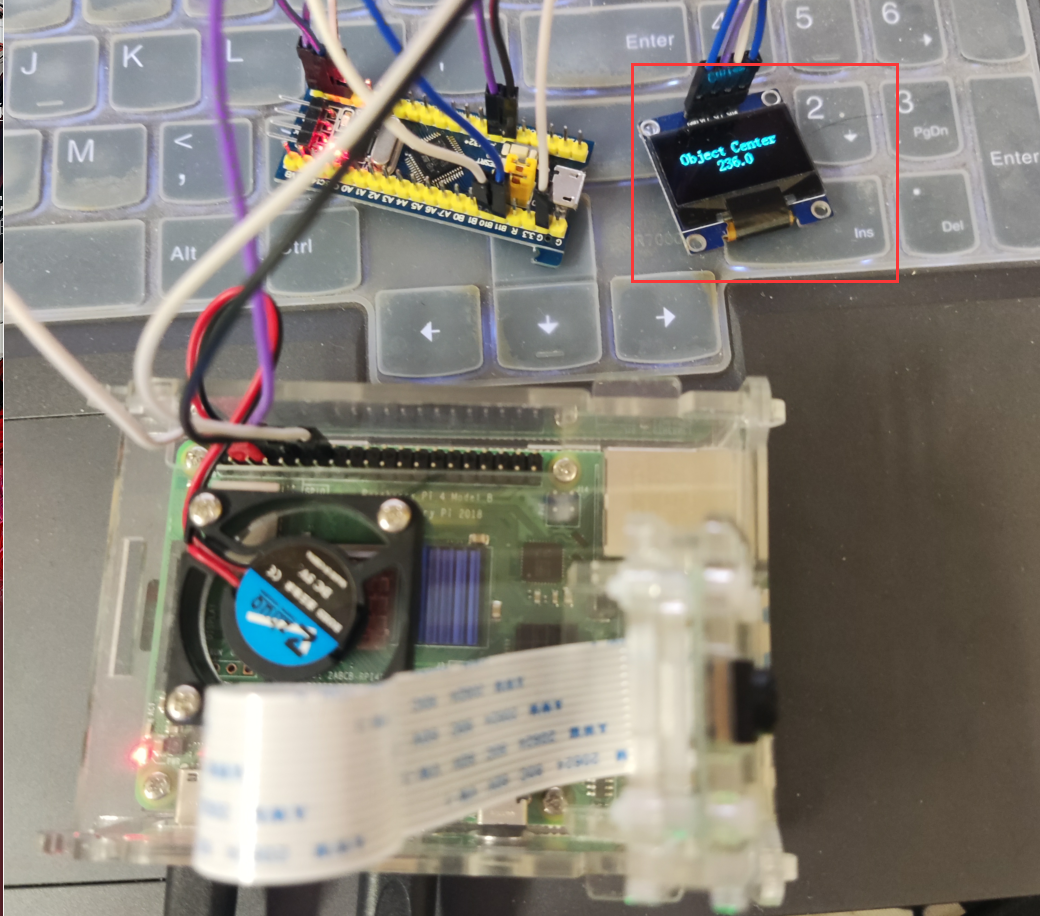
value = (num3-48) * 100 + (num2-48) * 10 + (num-48) * 1;
OLED_ShowStr(10,2,"Object Center",2);
OLED_Showdecimal(45,4,value,3,1,16);
if(flag == 2)
{
value = (num2-48) * 10 + (num-48) * 1;
OLED_Showdecimal(40,4,value,3,1,16);
}
}
这里默认都是 3 位数,所以之间按照 UART 数据传输高低位的数据将数据-48变为实际的数字,在×对应的比例即可得到实际值!flag 则是通过 USART1_RX_STA 变量的变化值判断一次传输过来几个字节的数据,可以判断是几位数!
读者朋友可以根据自己实际情况更改上述代码为己所用!
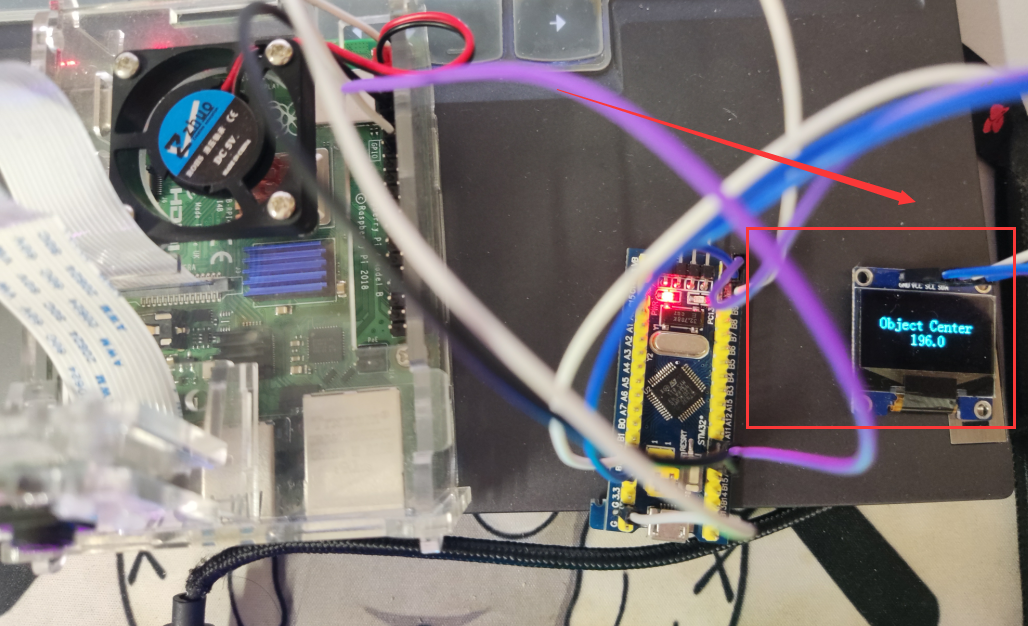
代码运行之后:
四、高级应用
智能小车的目标追踪
树莓派4B通常会出现在基于视觉技术进行规定目标的追踪,这个时候往往需要树莓派4B读取到目标框数据,然后发送给STM32下位机,之后STM32根据这些目标框信息来进行逻辑上的控制。
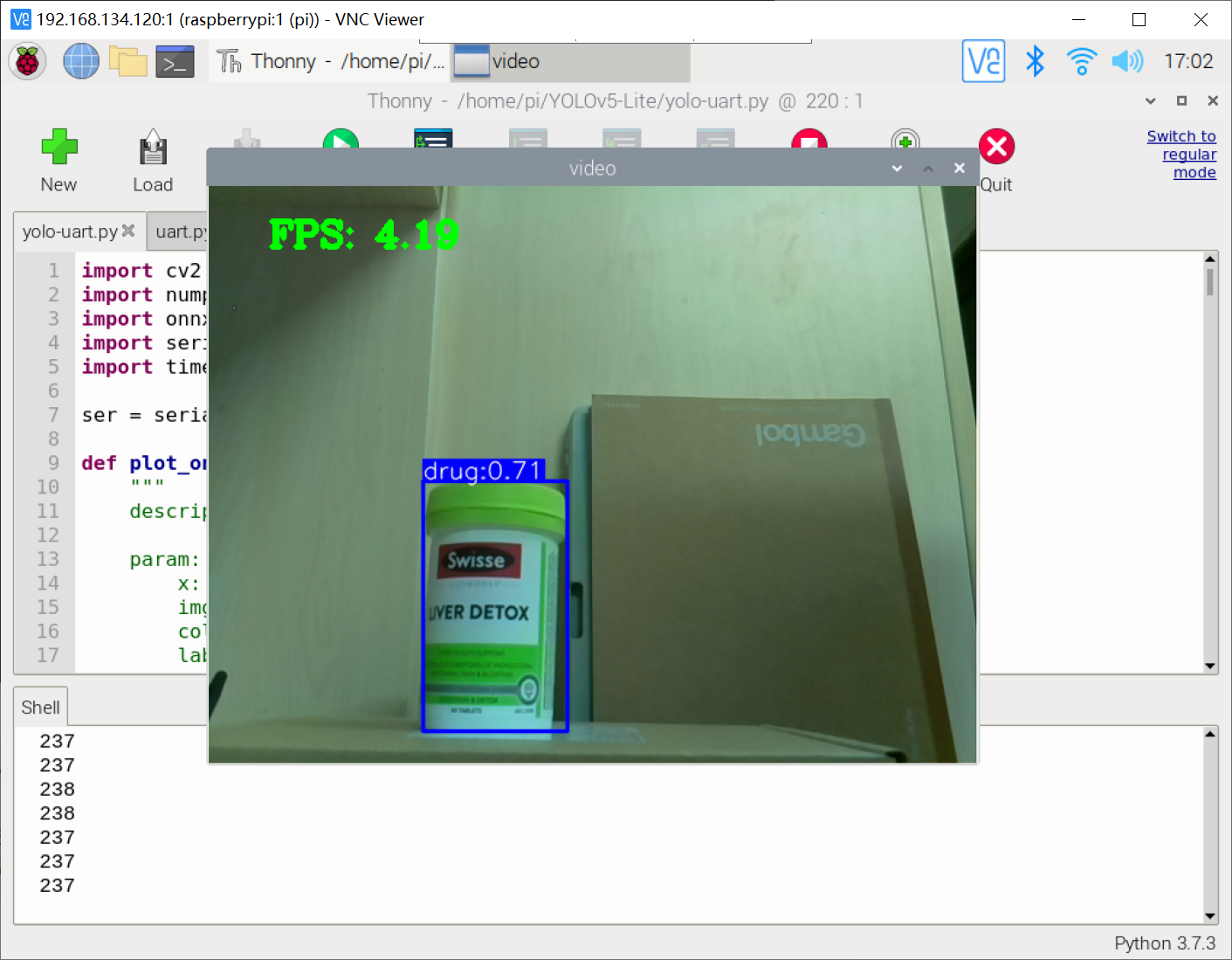
作者这里以上一篇博客的网络模型检测结果为例,代码如下:
import cv2
import numpy as np
import onnxruntime as ort
import serial
import time
ser = serial.Serial('/dev/ttyAMA0',115200)
def plot_one_box(x, img, color=None, label=None, line_thickness=None):
"""
description: Plots one bounding box on image img,
this function comes from YoLov5 project.
param:
x: a box likes [x1,y1,x2,y2]
img: a opencv image object
color: color to draw rectangle, such as (0,255,0)
label: str
line_thickness: int
return:
no return
"""
tl = (
line_thickness or round(0.002 * (img.shape[0] + img.shape[1]) / 2) + 1
) # line/font thickness
color = color or [random.randint(0, 255) for _ in range(3)]
c1, c2 = (int(x[0]), int(x[1])), (int(x[2]), int(x[3]))
ser.write(str(int((int(x[2])-int(x[0]))/2+int(x[0]))).encode())
print(int((int(x[2])-int(x[0]))/2+int(x[0])))
cv2.rectangle(img, c1, c2, color, thickness=tl, lineType=cv2.LINE_AA)
if label:
tf = max(tl - 1, 1) # font thickness
t_size = cv2.getTextSize(label, 0, fontScale=tl / 3, thickness=tf)[0]
c2 = c1[0] + t_size[0], c1[1] - t_size[1] - 3
cv2.rectangle(img, c1, c2, color, -1, cv2.LINE_AA) # filled
cv2.putText(
img,
label,
(c1[0], c1[1] - 2),
0,
tl / 3,
[225, 255, 255],
thickness=tf,
lineType=cv2.LINE_AA,
)
def _make_grid( nx, ny):
xv, yv = np.meshgrid(np.arange(ny), np.arange(nx))
return np.stack((xv, yv), 2).reshape((-1, 2)).astype(np.float32)
def cal_outputs(outs,nl,na,model_w,model_h,anchor_grid,stride):
row_ind = 0
grid = [np.zeros(1)] * nl
for i in range(nl):
h, w = int(model_w/ stride[i]), int(model_h / stride[i])
length = int(na * h * w)
if grid[i].shape[2:4] != (h, w):
grid[i] = _make_grid(w, h)
outs[row_ind:row_ind + length, 0:2] = (outs[row_ind:row_ind + length, 0:2] * 2. - 0.5 + np.tile(
grid[i], (na, 1))) * int(stride[i])
outs[row_ind:row_ind + length, 2:4] = (outs[row_ind:row_ind + length, 2:4] * 2) ** 2 * np.repeat(
anchor_grid[i], h * w, axis=0)
row_ind += length
return outs
def post_process_opencv(outputs,model_h,model_w,img_h,img_w,thred_nms,thred_cond):
conf = outputs[:,4].tolist()
c_x = outputs[:,0]/model_w*img_w
c_y = outputs[:,1]/model_h*img_h
w = outputs[:,2]/model_w*img_w
h = outputs[:,3]/model_h*img_h
p_cls = outputs[:,5:]
if len(p_cls.shape)==1:
p_cls = np.expand_dims(p_cls,1)
cls_id = np.argmax(p_cls,axis=1)
p_x1 = np.expand_dims(c_x-w/2,-1)
p_y1 = np.expand_dims(c_y-h/2,-1)
p_x2 = np.expand_dims(c_x+w/2,-1)
p_y2 = np.expand_dims(c_y+h/2,-1)
areas = np.concatenate((p_x1,p_y1,p_x2,p_y2),axis=-1)
areas = areas.tolist()
ids = cv2.dnn.NMSBoxes(areas,conf,thred_cond,thred_nms)
if len(ids)>0:
return np.array(areas)[ids],np.array(conf)[ids],cls_id[ids]
else:
return [],[],[]
def infer_img(img0,net,model_h,model_w,nl,na,stride,anchor_grid,thred_nms=0.4,thred_cond=0.5):
# 图像预处理
img = cv2.resize(img0, [model_w,model_h], interpolation=cv2.INTER_AREA)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
img = img.astype(np.float32) / 255.0
blob = np.expand_dims(np.transpose(img, (2, 0, 1)), axis=0)
# 模型推理
outs = net.run(None, {net.get_inputs()[0].name: blob})[0].squeeze(axis=0)
# 输出坐标矫正
outs = cal_outputs(outs,nl,na,model_w,model_h,anchor_grid,stride)
# 检测框计算
img_h,img_w,_ = np.shape(img0)
boxes,confs,ids = post_process_opencv(outs,model_h,model_w,img_h,img_w,thred_nms,thred_cond)
return boxes,confs,ids
if __name__ == "__main__":
# 模型加载
model_pb_path = "best.onnx"
so = ort.SessionOptions()
net = ort.InferenceSession(model_pb_path, so)
# 标签字典
dic_labels= {0:'drug',
1:'glue',
2:'prime'}
# 模型参数
model_h = 320
model_w = 320
nl = 3
na = 3
stride=[8.,16.,32.]
anchors = [[10, 13, 16, 30, 33, 23], [30, 61, 62, 45, 59, 119], [116, 90, 156, 198, 373, 326]]
anchor_grid = np.asarray(anchors, dtype=np.float32).reshape(nl, -1, 2)
video = 0
cap = cv2.VideoCapture(video)
flag_det = False
while True:
success, img0 = cap.read()
if success:
if flag_det:
t1 = time.time()
det_boxes,scores,ids = infer_img(img0,net,model_h,model_w,nl,na,stride,anchor_grid,thred_nms=0.4,thred_cond=0.5)
t2 = time.time()
for box,score,id in zip(det_boxes,scores,ids):
label = '%s:%.2f'%(dic_labels[id],score)
plot_one_box(box.astype(np.int16), img0, color=(255,0,0), label=label, line_thickness=None)
str_FPS = "FPS: %.2f"%(1./(t2-t1))
cv2.putText(img0,str_FPS,(50,50),cv2.FONT_HERSHEY_COMPLEX,1,(0,255,0),3)
cv2.imshow("video",img0)
key=cv2.waitKey(1) & 0xFF
if key == ord('q'):
break
elif key & 0xFF == ord('s'):
flag_det = not flag_det
print(flag_det)
cap.release()
作者上述代码仅以目标物体中心的 x 轴坐标为例,控制机理是这样的:当 x 数值大于320(图片为640×640)时候控制小车向便宜右偏移,反之则向左偏移。目标框的w,h则可以根据实际情况设置阈值,控制小车的前进速度。当目标框的宽度 w 太小时候,加速小车前进,反之则减速!
作者有话:
目前的 YOLOv-Lite 网络模型的 FPS 还是太低了,在该 FPS 下去进行目标追踪的控制是非常困难的。此外,实际情况下搭载在小车亦或是航行器的 Camera 在拍摄过程中避免不了强烈的高斯白噪,需要加卡尔曼滤波进行优化目标框信息!
所以,后续作者将推出可以基于视觉追踪实战的网络模型和目标追踪代码,感兴趣的读者朋友可以期待一下!
五、项目效果
最后
自我介绍一下,小编13年上海交大毕业,曾经在小公司待过,也去过华为、OPPO等大厂,18年进入阿里一直到现在。
深知大多数Java工程师,想要提升技能,往往是自己摸索成长,自己不成体系的自学效果低效漫长且无助。
因此收集整理了一份《2024年嵌入式&物联网开发全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升又不知道该从何学起的朋友,同时减轻大家的负担。


既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,基本涵盖了95%以上嵌入式&物联网开发知识点,真正体系化!
如果你觉得这些内容对你有帮助,需要这份全套学习资料的朋友可以戳我获取!!
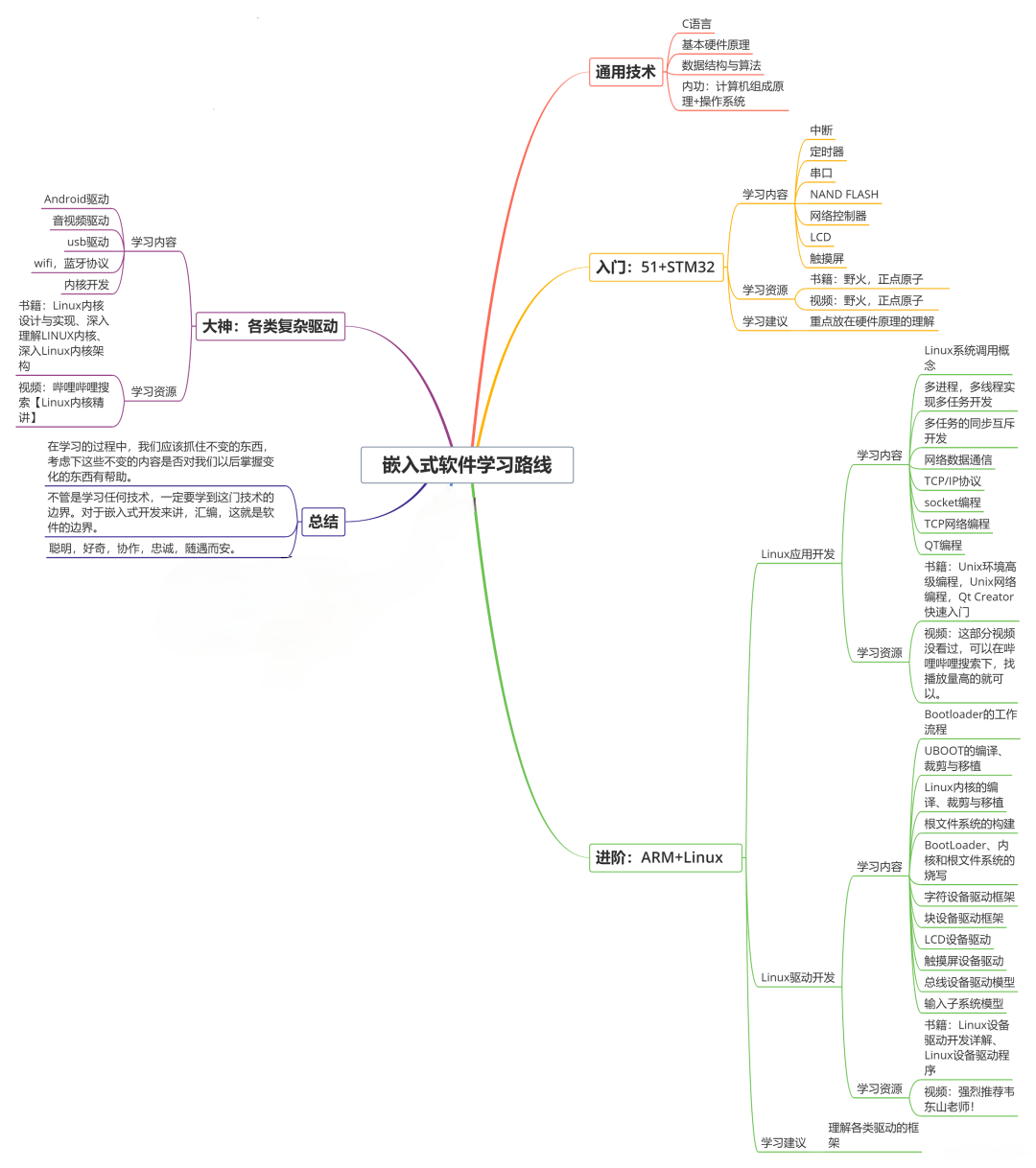
由于文件比较大,这里只是将部分目录大纲截图出来,每个节点里面都包含大厂面经、学习笔记、源码讲义、实战项目、讲解视频,并且后续会持续更新!!
Z83bA-1715710985602)]
[外链图片转存中…(img-jN6mSh3j-1715710985603)]
[外链图片转存中…(img-mnU3NGFm-1715710985604)]
[外链图片转存中…(img-LMUpwawJ-1715710985605)]
[外链图片转存中…(img-IrGay9Hn-1715710985605)]
[外链图片转存中…(img-8zN45Cjj-1715710985606)]
[外链图片转存中…(img-PSvXQLlZ-1715710985606)]
既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,基本涵盖了95%以上嵌入式&物联网开发知识点,真正体系化!
如果你觉得这些内容对你有帮助,需要这份全套学习资料的朋友可以戳我获取!!
由于文件比较大,这里只是将部分目录大纲截图出来,每个节点里面都包含大厂面经、学习笔记、源码讲义、实战项目、讲解视频,并且后续会持续更新!!















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









