







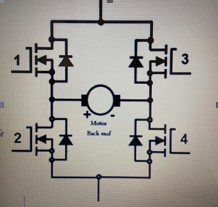
1.电机驱动原理图

2.最简单的电机正反转电路
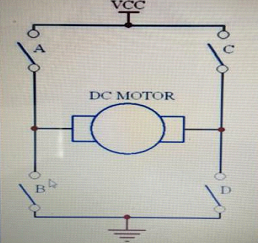
当开关A,D闭合,B.,C断开电机正常旋转,方向为正。
当开关B,C闭合,A,D断开电机正常旋转,方向为反。
当开关A,C闭合,B,D断开。或者B,D闭合,A,C断开电机不旋转,形成电势被短路,相当于刹车效果。
当A,B闭合,或者C,D闭合,电源会短路,会烧毁电源。
当A,B,C,D都断开会惯性转动。
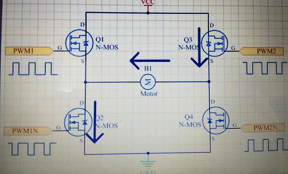
3.单极模式下:
在MOS管1 PWM为高时,1,4导通。2,3截止。电流从1正极流向4负极。
1PWM为低时,2,4导通,1,3截止。电流从2流向4
4.双极模式下:
A为占空比。
A>50%,D pwm1 > D pwm2 ,电机正转。
A<50%,D pwm1 < D pwm2 ,电机反转。
A = 50%,D pwm1 = D pwm2 ,电机停止。
A = 0,电机反转, 速度最高。
A = 100%,电机正转 ,速度最高。
5.可以使用IR2104来驱动:
ir2104半桥驱动,一种是半桥驱动ir2104,半桥电路是两个mos管,使用两片ir2104型半桥驱动芯片可以组成完整的直流电机h桥式驱动电路,ir2104电路,2路pwm信号通过ir2104半桥驱动器(half-bridgedriver)和相应保护电路等等一种是全桥驱动,一种是半桥驱动ir2104,半桥电路是两个mos管使用两片ir2104型半桥驱动芯片可以组成完整的直流电机h桥式驱动电路.


这是IR2104的连接图与时序图。IN口是PWM信号的输入端。SD是使能端,通过时序图可以看出,当SD口是低电平的时候,HO,LO都不正常输出。因此设计的时候给他加上了高电平。
相信大家也发现了,我们的升压的关键是二极管D2与电容C4。C4的大小需要考虑信号的频率,MOS的极间电容,参考IR2104所给的参数,这里我按照往年经验,选取了1.5uF.
6.升压电路:

最后
自我介绍一下,小编13年上海交大毕业,曾经在小公司待过,也去过华为、OPPO等大厂,18年进入阿里一直到现在。
深知大多数Java工程师,想要提升技能,往往是自己摸索成长,自己不成体系的自学效果低效漫长且无助。
因此收集整理了一份《2024年嵌入式&物联网开发全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升又不知道该从何学起的朋友,同时减轻大家的负担。



既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,基本涵盖了95%以上嵌入式&物联网开发知识点,真正体系化!
如果你觉得这些内容对你有帮助,需要这份全套学习资料的朋友可以戳我获取!!
由于文件比较大,这里只是将部分目录大纲截图出来,每个节点里面都包含大厂面经、学习笔记、源码讲义、实战项目、讲解视频,并且后续会持续更新!!
.net/topics/618654289)
由于文件比较大,这里只是将部分目录大纲截图出来,每个节点里面都包含大厂面经、学习笔记、源码讲义、实战项目、讲解视频,并且后续会持续更新!!














 7593
7593











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









