







 本文详细介绍了SENet中的关键操作,如卷积、Squeeze、Excitation等,特别关注了如何通过SE模块在ResNet中实现特征权重学习。文章还提供了SE-ResNet的具体代码实现,展示了如何在不同深度的网络结构中嵌入这种注意力机制。
本文详细介绍了SENet中的关键操作,如卷积、Squeeze、Excitation等,特别关注了如何通过SE模块在ResNet中实现特征权重学习。文章还提供了SE-ResNet的具体代码实现,展示了如何在不同深度的网络结构中嵌入这种注意力机制。

那么这个 )的公式就是下面的公式1(卷积操作,
)的公式就是下面的公式1(卷积操作, )表示第c个卷积核,
)表示第c个卷积核, )表示第s个输入)。
)表示第s个输入)。

)得到的U就是Figure1中的左边第二个三维矩阵,也叫tensor,或者叫C个大小为H*W的feature map。而uc表示U中第c个二维矩阵,下标c表示channel。
接下来就是Squeeze操作,公式非常简单,就是一个global average pooling:

因此公式2就将H*W*C的输入转换成1*1*C的输出,对应Figure1中的Fsq操作。为什么会有这一步呢?这一步的结果相当于表明该层C个feature map的数值分布情况,或者叫全局信息。
再接下来就是Excitation操作,如公式3。直接看最后一个等号,前面squeeze得到的结果是z,这里先用W1乘以z,就是一个全连接层操作,W1的维度是C/r * C,这个r是一个缩放参数,在文中取的是16,这个参数的目的是为了减少channel个数从而降低计算量。又因为z的维度是1*1*C,所以W1z的结果就是1*1*C/r;然后再经过一个ReLU层,输出的维度不变;然后再和W2相乘,和W2相乘也是一个全连接层的过程,W2的维度是C*C/r,因此输出的维度就是1*1*C;最后再经过sigmoid函数,得到s:

也就是说最后得到的这个s的维度是1*1*C,C表示channel数目。这个s其实是本文的核心,它是用来刻画tensor U中C个feature map的权重。而且这个权重是通过前面这些全连接层和非线性层学习得到的,因此可以end-to-end训练。这两个全连接层的作用就是融合各通道的feature map信息,因为前面的squeeze都是在某个channel的feature map里面操作。
在得到s之后,就可以对原来的tensor U操作了,就是下面的公式4。也很简单,就是channel-wise multiplication,什么意思呢? )是一个二维矩阵,
)是一个二维矩阵, )是一个数,也就是权重,因此相当于把)矩阵中的每个值都乘以)。对应Figure1中的Fscale。
)是一个数,也就是权重,因此相当于把)矩阵中的每个值都乘以)。对应Figure1中的Fscale。

========================================================================================================
SENet 在具体网络中应用(代码实现SE_ResNet)
==============================
介绍完具体的公式实现,下面介绍下SE block怎么运用到具体的网络之中。
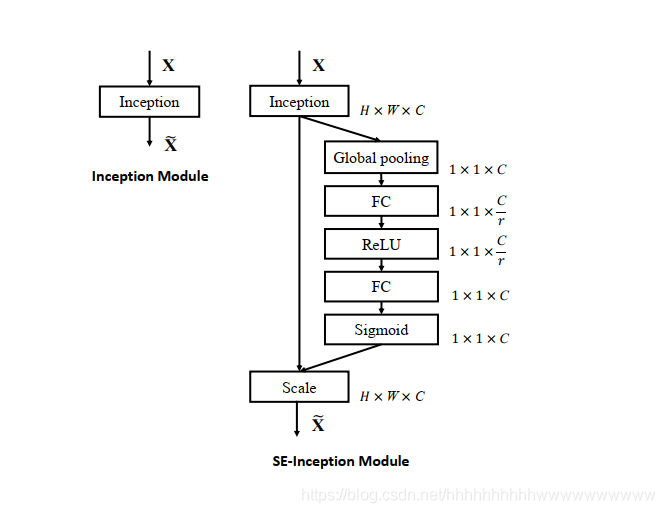

上图是将 SE 模块嵌入到 Inception 结构的一个示例。方框旁边的维度信息代表该层的输出。
这里我们使用 global average pooling 作为 Squeeze 操作。紧接着两个 Fully Connected 层组成一个 Bottleneck 结构去建模通道间的相关性,并输出和输入特征同样数目的权重。我们首先将特征维度降低到输入的 1/16,然后经过 ReLu 激活后再通过一个 Fully Connected 层升回到原来的维度。这样做比直接用一个 Fully Connected 层的好处在于:
1)具有更多的非线性,可以更好地拟合通道间复杂的相关性;
2)极大地减少了参数量和计算量。然后通过一个 Sigmoid 的门获得 0~1 之间归一化的权重,最后通过一个 Scale 的操作来将归一化后的权重加权到每个通道的特征上。
除此之外,SE 模块还可以嵌入到含有 skip-connections 的模块中。上右图是将 SE 嵌入到 ResNet 模块中的一个例子,操作过程基本和 SE-Inception 一样,只不过是在 Addition 前对分支上 Residual 的特征进行了特征重标定。如果对 Addition 后主支上的特征进行重标定,由于在主干上存在 0~1 的 scale 操作,在网络较深 BP 优化时就会在靠近输入层容易出现梯度消散的情况,导致模型难以优化。
目前大多数的主流网络都是基于这两种类似的单元通过 repeat 方式叠加来构造的。由此可见,SE 模块可以嵌入到现在几乎所有的网络结构中。通过在原始网络结构的 building block 单元中嵌入 SE 模块,我们可以获得不同种类的 SENet。如 SE-BN-Inception、SE-ResNet、SE-ReNeXt、SE-Inception-ResNet-v2 等等。
本例通过实现SE-ResNet,来显示如何将SE模块嵌入到ResNet网络中。SE-ResNet模型如下图:

第一个残差模块
第一个残差模块用于实现ResNet18、ResNet34模型,SENet嵌入到第二个卷积的后面。
第一个残差模块
class BasicBlock(layers.Layer):
def init(self, filter_num, stride=1):
super(BasicBlock, self).init()
self.conv1 = layers.Conv2D(filter_num, (3, 3), strides=stride, padding=‘same’)
self.bn1 = layers.BatchNormalization()
self.relu = layers.Activation(‘relu’)
self.conv2 = layers.Conv2D(filter_num, (3, 3), strides=1, padding=‘same’)
self.bn2 = layers.BatchNormalization()
se-block
self.se_globalpool = keras.layers.GlobalAveragePooling2D()
self.se_resize = keras.layers.Reshape((1, 1, filter_num))
self.se_fc1 = keras.layers.Dense(units=filter_num // 16, activation=‘relu’,
use_bias=False)
self.se_fc2 = keras.layers.Dense(units=filter_num, activation=‘sigmoid’,
use_bias=False)
if stride != 1:
self.downsample = Sequential()
self.downsample.add(layers.Conv2D(filter_num, (1, 1), strides=stride))
else:
self.downsample = lambda x: x
def call(self, input, training=None):
out = self.conv1(input)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
se_block
b = out
out = self.se_globalpool(out)
out = self.se_resize(out)
out = self.se_fc1(out)
out = self.se_fc2(out)
out = keras.layers.Multiply()([b, out])
identity = self.downsample(input)
output = layers.add([out, identity])
output = tf.nn.relu(output)
return output
第二个残差模块
第二个残差模块用于实现ResNet50、ResNet101、ResNet152模型,SENet模块嵌入到第三个卷积后面。
第二个残差模块
class Block(layers.Layer):
def init(self, filters, downsample=False, stride=1):
super(Block, self).init()
self.downsample = downsample
self.conv1 = layers.Conv2D(filters, (1, 1), strides=stride, padding=‘same’)
self.bn1 = layers.BatchNormalization()
self.relu = layers.Activation(‘relu’)
self.conv2 = layers.Conv2D(filters, (3, 3), strides=1, padding=‘same’)
self.bn2 = layers.BatchNormalization()
self.conv3 = layers.Conv2D(4 * filters, (1, 1), strides=1, padding=‘same’)
self.bn3 = layers.BatchNormalization()
se-block
self.se_globalpool = keras.layers.GlobalAveragePooling2D()
self.se_resize = keras.layers.Reshape((1, 1, 4 * filters))
self.se_fc1 = keras.layers.Dense(units=4 * filters // 16, activation=‘relu’,
use_bias=False)
self.se_fc2 = keras.layers.Dense(units=4 * filters, activation=‘sigmoid’,
use_bias=False)
if self.downsample:
self.shortcut = Sequential()
self.shortcut.add(layers.Conv2D(4 * filters, (1, 1), strides=stride))
self.shortcut.add(layers.BatchNormalization(axis=3))
def call(self, input, training=None):
out = self.conv1(input)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
b = out
out = self.se_globalpool(out)
out = self.se_resize(out)
out = self.se_fc1(out)
out = self.se_fc2(out)
out = keras.layers.Multiply()([b, out])
if self.downsample:
shortcut = self.shortcut(input)
else:
shortcut = input
output = layers.add([out, shortcut])
output = tf.nn.relu(output)
return output
ResNet18、ResNet34模型的完整代码
import tensorflow as tf
from tensorflow import keras
from tensorflow.keras import layers, Sequential
第一个残差模块
class BasicBlock(layers.Layer):
def init(self, filter_num, stride=1):
super(BasicBlock, self).init()
self.conv1 = layers.Conv2D(filter_num, (3, 3), strides=stride, padding=‘same’)
self.bn1 = layers.BatchNormalization()
self.relu = layers.Activation(‘relu’)
self.conv2 = layers.Conv2D(filter_num, (3, 3), strides=1, padding=‘same’)
self.bn2 = layers.BatchNormalization()
se-block
self.se_globalpool = keras.layers.GlobalAveragePooling2D()
self.se_resize = keras.layers.Reshape((1, 1, filter_num))
self.se_fc1 = keras.layers.Dense(units=filter_num // 16, activation=‘relu’,
use_bias=False)
self.se_fc2 = keras.layers.Dense(units=filter_num, activation=‘sigmoid’,
use_bias=False)
if stride != 1:
self.downsample = Sequential()
self.downsample.add(layers.Conv2D(filter_num, (1, 1), strides=stride))
else:
self.downsample = lambda x: x
def call(self, input, training=None):
out = self.conv1(input)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
se_block
b = out
out = self.se_globalpool(out)
out = self.se_resize(out)
out = self.se_fc1(out)
out = self.se_fc2(out)
out = keras.layers.Multiply()([b, out])
identity = self.downsample(input)
output = layers.add([out, identity])
output = tf.nn.relu(output)
return output
class ResNet(keras.Model):
def init(self, layer_dims, num_classes=10):
super(ResNet, self).init()
预处理层
self.padding = keras.layers.ZeroPadding2D((3, 3))
self.stem = Sequential([
layers.Conv2D(64, (7, 7), strides=(2, 2)),
layers.BatchNormalization(),
layers.Activation(‘relu’),
layers.MaxPool2D(pool_size=(3, 3), strides=(2, 2), padding=‘same’)
])
resblock
self.layer1 = self.build_resblock(64, layer_dims[0])
self.layer2 = self.build_resblock(128, layer_dims[1], stride=2)
self.layer3 = self.build_resblock(256, layer_dims[2], stride=2)
self.layer4 = self.build_resblock(512, layer_dims[3], stride=2)
全局池化
self.avgpool = layers.GlobalAveragePooling2D()
全连接层
self.fc = layers.Dense(num_classes, activation=tf.keras.activations.softmax)
def call(self, input, training=None):
x= self.padding(input)
x = self.stem(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
[b,c]
x = self.avgpool(x)
x = self.fc(x)
return x
def build_resblock(self, filter_num, blocks, stride=1):
res_blocks = Sequential()
res_blocks.add(BasicBlock(filter_num, stride))
for pre in range(1, blocks):
res_blocks.add(BasicBlock(filter_num, stride=1))
return res_blocks
def ResNet34(num_classes=10):
return ResNet([2, 2, 2, 2], num_classes=num_classes)
def ResNet34(num_classes=10):
return ResNet([3, 4, 6, 3], num_classes=num_classes)
model = ResNet34(num_classes=1000)
model.build(input_shape=(1, 224, 224, 3))
print(model.summary()) # 统计网络参数
ResNet50、ResNet101、ResNet152完整代码
import tensorflow as tf
from tensorflow import keras
from tensorflow.keras import layers, Sequential
第二个残差模块
class Block(layers.Layer):
def init(self, filters, downsample=False, stride=1):
super(Block, self).init()
self.downsample = downsample
self.conv1 = layers.Conv2D(filters, (1, 1), strides=stride, padding=‘same’)
self.bn1 = layers.BatchNormalization()
self.relu = layers.Activation(‘relu’)
self.conv2 = layers.Conv2D(filters, (3, 3), strides=1, padding=‘same’)
self.bn2 = layers.BatchNormalization()
self.conv3 = layers.Conv2D(4 * filters, (1, 1), strides=1, padding=‘same’)
self.bn3 = layers.BatchNormalization()
se-block
self.se_globalpool = keras.layers.GlobalAveragePooling2D()
self.se_resize = keras.layers.Reshape((1, 1, 4 * filters))
self.se_fc1 = keras.layers.Dense(units=4 * filters // 16, activation=‘relu’,
use_bias=False)
self.se_fc2 = keras.layers.Dense(units=4 * filters, activation=‘sigmoid’,
use_bias=False)
if self.downsample:
self.shortcut = Sequential()
self.shortcut.add(layers.Conv2D(4 * filters, (1, 1), strides=stride))
self.shortcut.add(layers.BatchNormalization(axis=3))
def call(self, input, training=None):
out = self.conv1(input)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
自我介绍一下,小编13年上海交大毕业,曾经在小公司待过,也去过华为、OPPO等大厂,18年进入阿里一直到现在。
深知大多数Python工程师,想要提升技能,往往是自己摸索成长或者是报班学习,但对于培训机构动则几千的学费,着实压力不小。自己不成体系的自学效果低效又漫长,而且极易碰到天花板技术停滞不前!
因此收集整理了一份《2024年Python开发全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升又不知道该从何学起的朋友,同时减轻大家的负担。



既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,基本涵盖了95%以上Python开发知识点,真正体系化!
由于文件比较大,这里只是将部分目录大纲截图出来,每个节点里面都包含大厂面经、学习笔记、源码讲义、实战项目、讲解视频,并且后续会持续更新
如果你觉得这些内容对你有帮助,可以添加V获取:vip1024c (备注Python)

一、Python所有方向的学习路线
Python所有方向路线就是把Python常用的技术点做整理,形成各个领域的知识点汇总,它的用处就在于,你可以按照上面的知识点去找对应的学习资源,保证自己学得较为全面。
二、学习软件
工欲善其事必先利其器。学习Python常用的开发软件都在这里了,给大家节省了很多时间。

三、入门学习视频
我们在看视频学习的时候,不能光动眼动脑不动手,比较科学的学习方法是在理解之后运用它们,这时候练手项目就很适合了。
一个人可以走的很快,但一群人才能走的更远。不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎扫码加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!

29f47b8a67243c1008edf79.png)
二、学习软件
工欲善其事必先利其器。学习Python常用的开发软件都在这里了,给大家节省了很多时间。
三、入门学习视频
我们在看视频学习的时候,不能光动眼动脑不动手,比较科学的学习方法是在理解之后运用它们,这时候练手项目就很适合了。
一个人可以走的很快,但一群人才能走的更远。不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎扫码加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
[外链图片转存中…(img-UX82TDkd-1712878980299)]















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









