







网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
文章目录
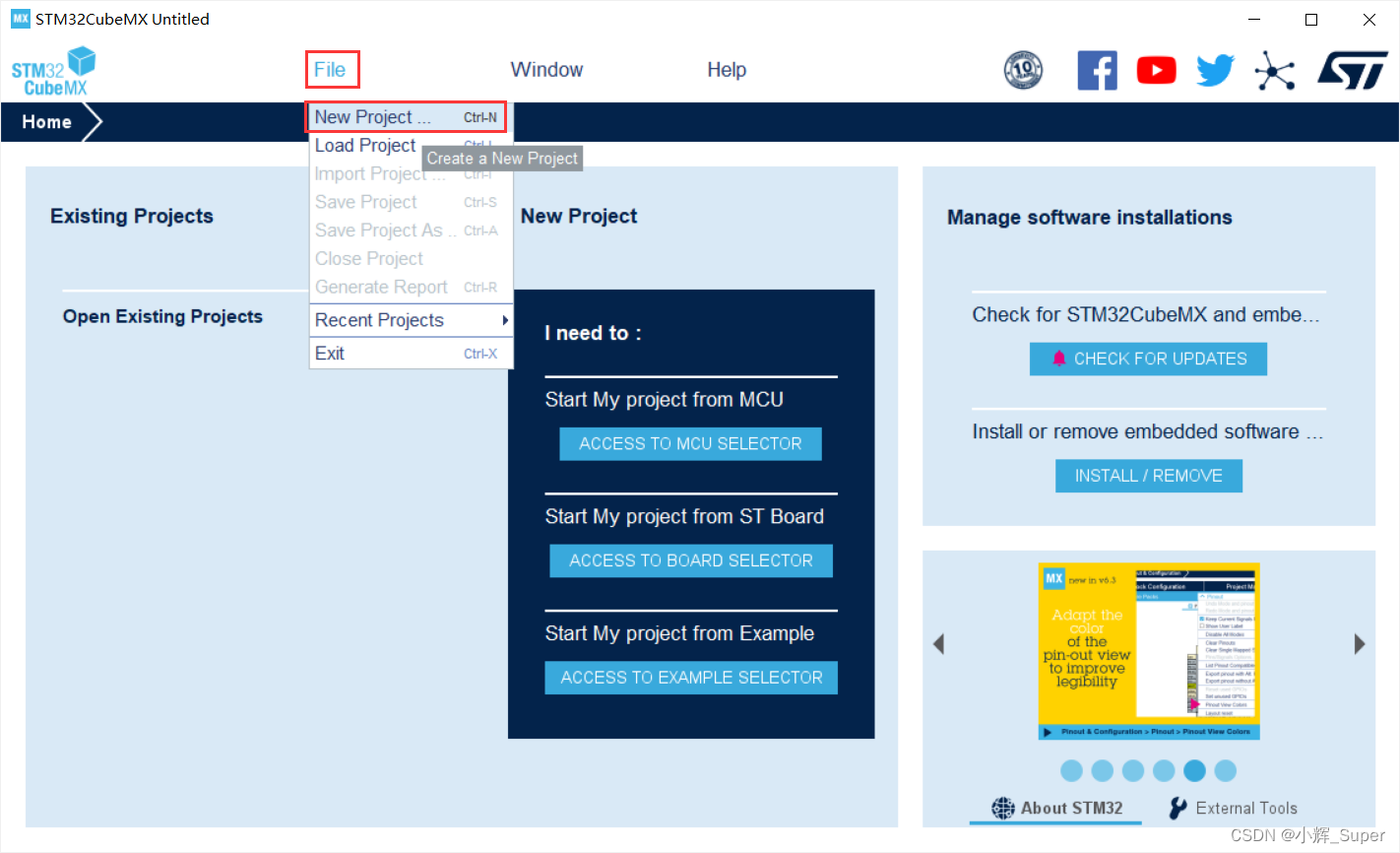
一、新建工程
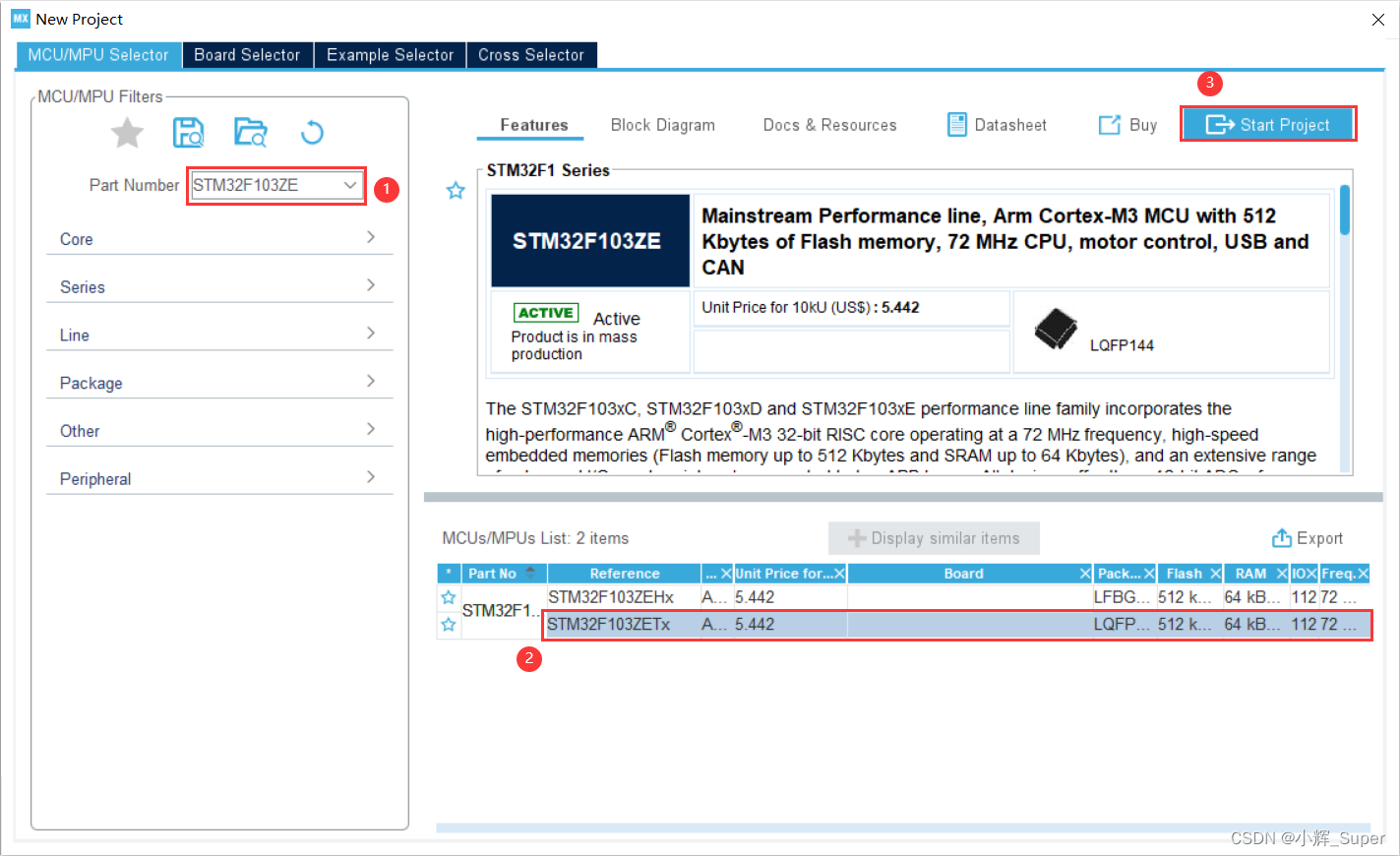
二、选择芯片型号
我使用的开发板是正点原子 STM32F103ZET6 核心板
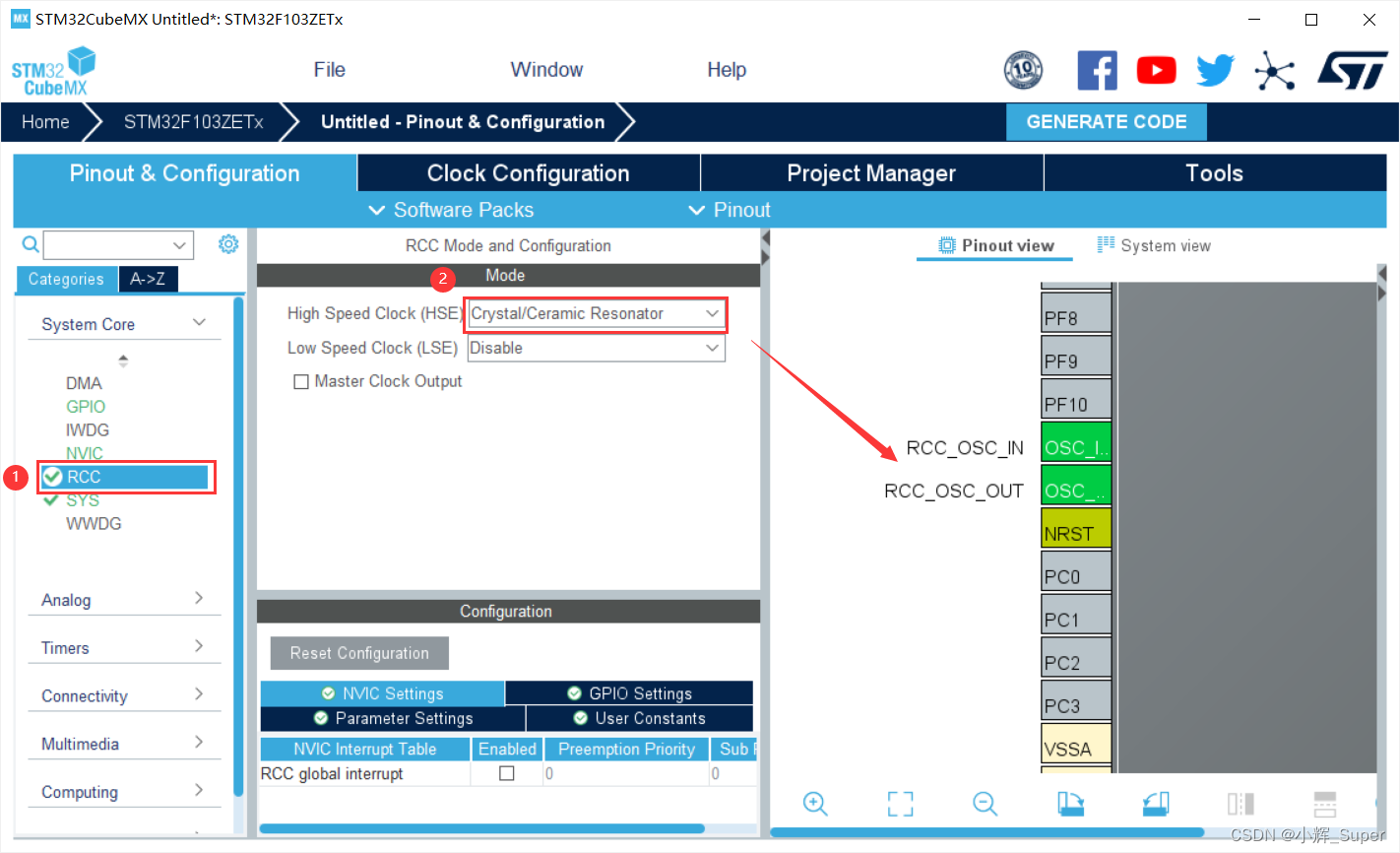
三、配置时钟
开发板焊接了外部晶振,所以我 RCC(Reset and Cock Control) 配置选择了 Crystal/Ceramic Resonator(石英/陶瓷谐振器),配置完成后,右边的 Pinout view 里相关引脚就会被标绿。
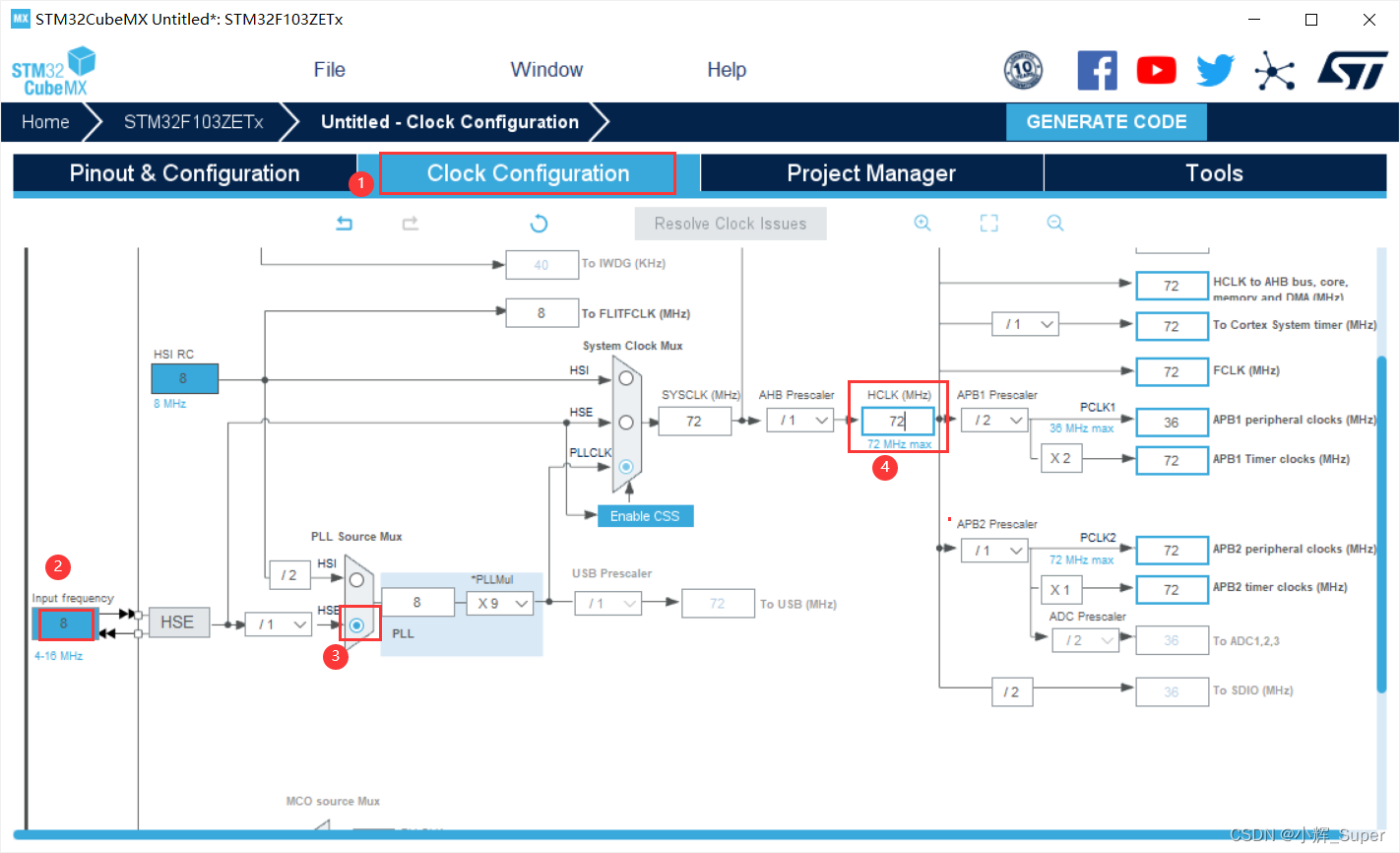
外部高速时钟配置完成后,进入 Clock Configuration 选项,根据实际情况,将系统时钟配置为 72 MHz,配置步骤如下,最后按下回车,软件会自动调整分频和倍频参数。
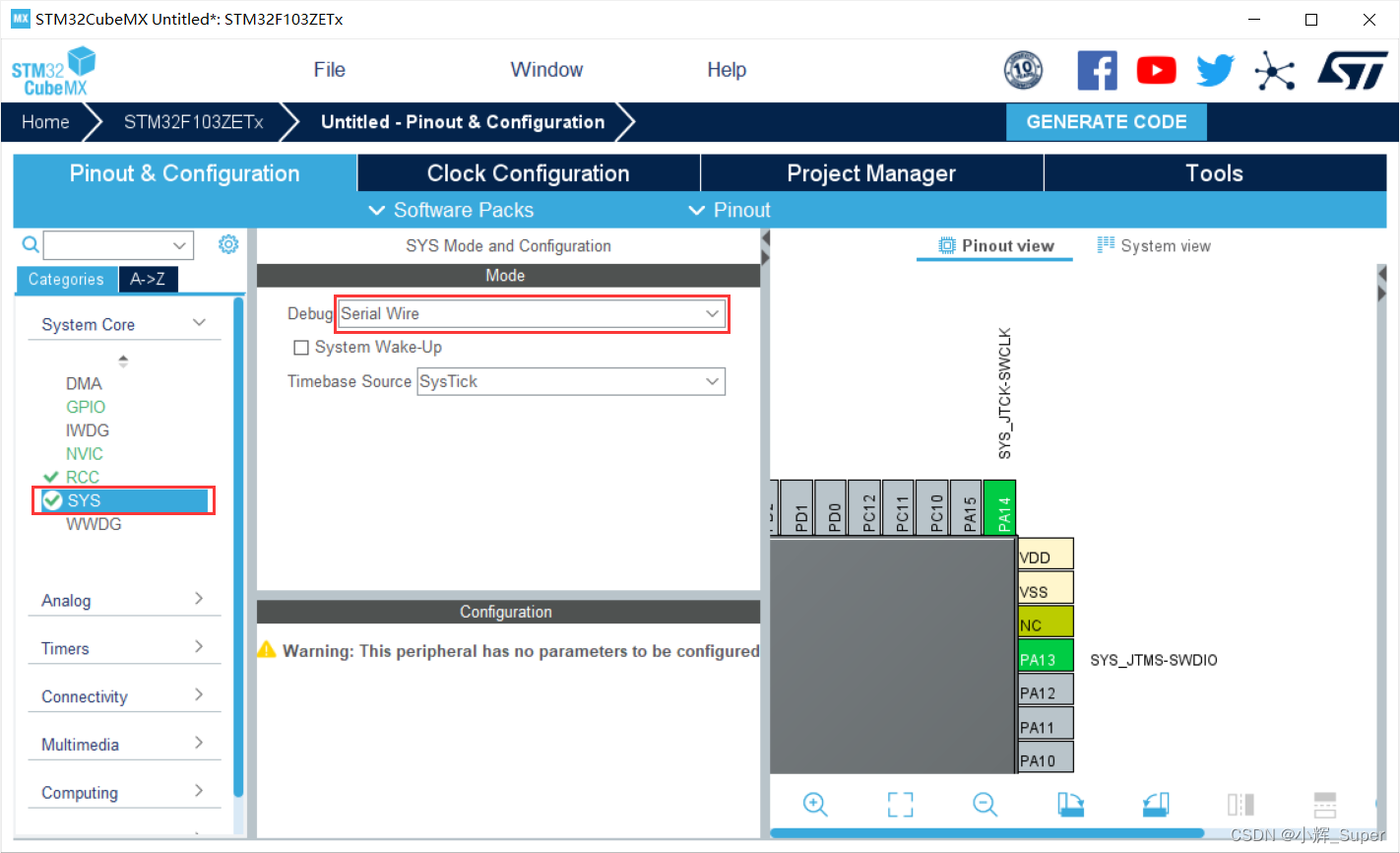
四、配置调试模式
ST-Link 就是 Serial Wire 调试模式,一定要设置!!!
以前使用 M0 的芯片,不配置这个模式没出现问题,但现在这个型号,如果不配置 Serial Wire 模式,程序一旦通过 ST-Link 烧录到芯片中,芯片就再也不能被ST-Link 识别了。(后来我是通过 STMISP 工具烧录程序/擦除后才恢复正常的)
五、定时器(输入捕获)参数配置
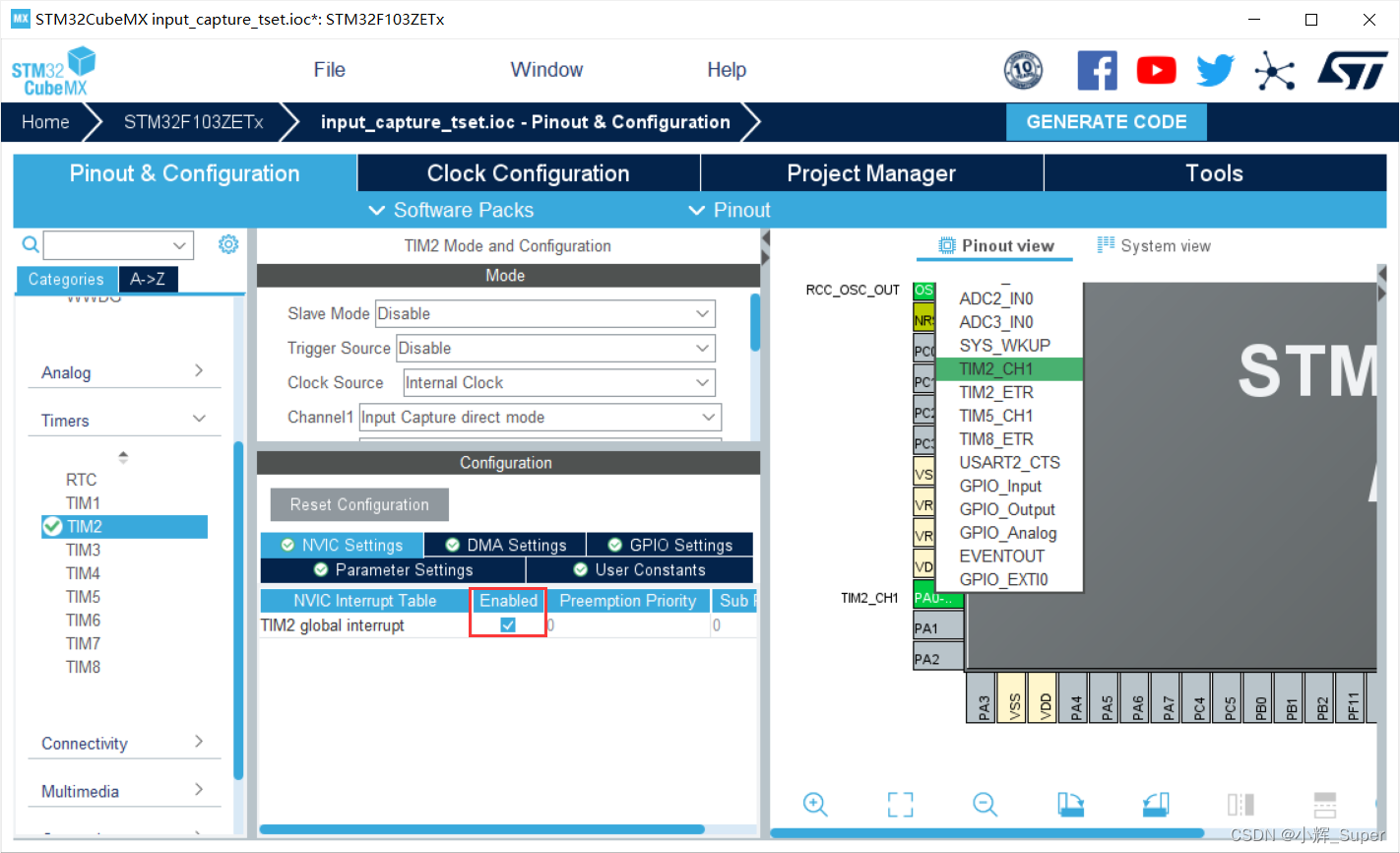
我将 TIM2 的通道 1 作为输入捕获测试通道,STM32CubeMX 会默认配置 PA0 作为输入捕获的 IO 口(PA0 有该复用功能,且不需要重映像,所以自动将 PA0 设为 TIM_CH1 的 GPIO),定时器的参数设定如下图所示(输入捕获的配置可以不用改,默认捕获上升沿):
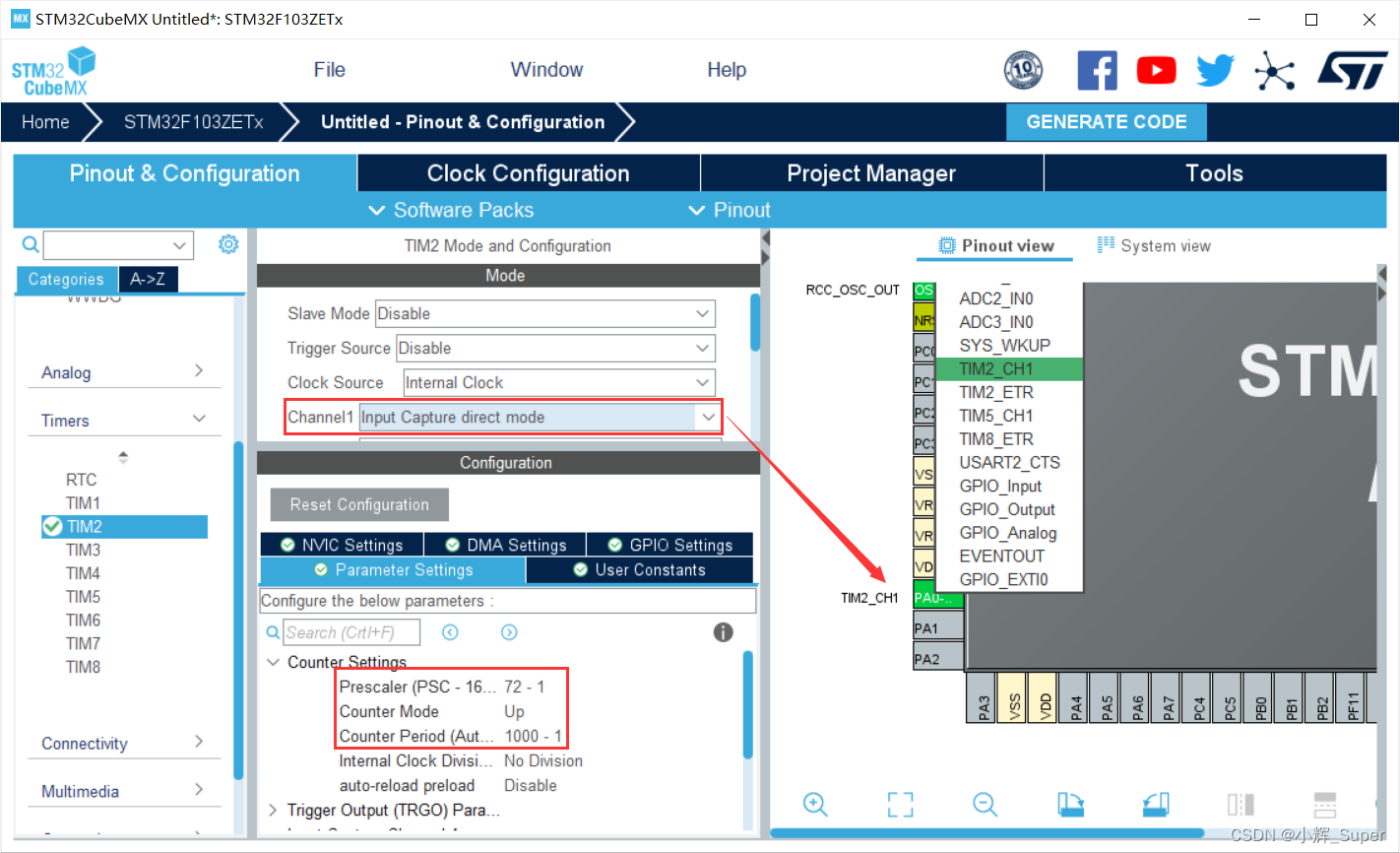
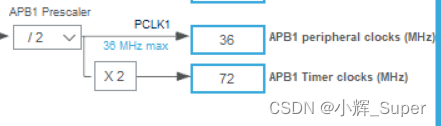
分频系数为 72-1,意思就是 72 分频(0表示 1 分频,1 表示 2 分频,以此类推),TIM2 的时钟频率为 72 MHz(下图中,APB1 Timer clocks 的时钟频率为 72MHz,TIM2 挂载在 APB1 上)。将其进行 72 分频后,频率变成了 1MHz,即每秒计数 1000000 次。周期设置为 1000-1(这里要减一,应该是因为计数值最小为 0),代表着一个完整的计时周期为 1000 次计数,结合定时器计数频率,定时器一次计时溢出所需的时间为 1ms。【频率决定了输入捕获的捕获周期,计时值设为 1000 只是为了方便计算】
输入捕获需要开启定时器的中断,无论是计时溢出还是输入捕获都需要使用到中断。
六、生成 Keil 工程
设置 IDE 和 工程目录及名称:
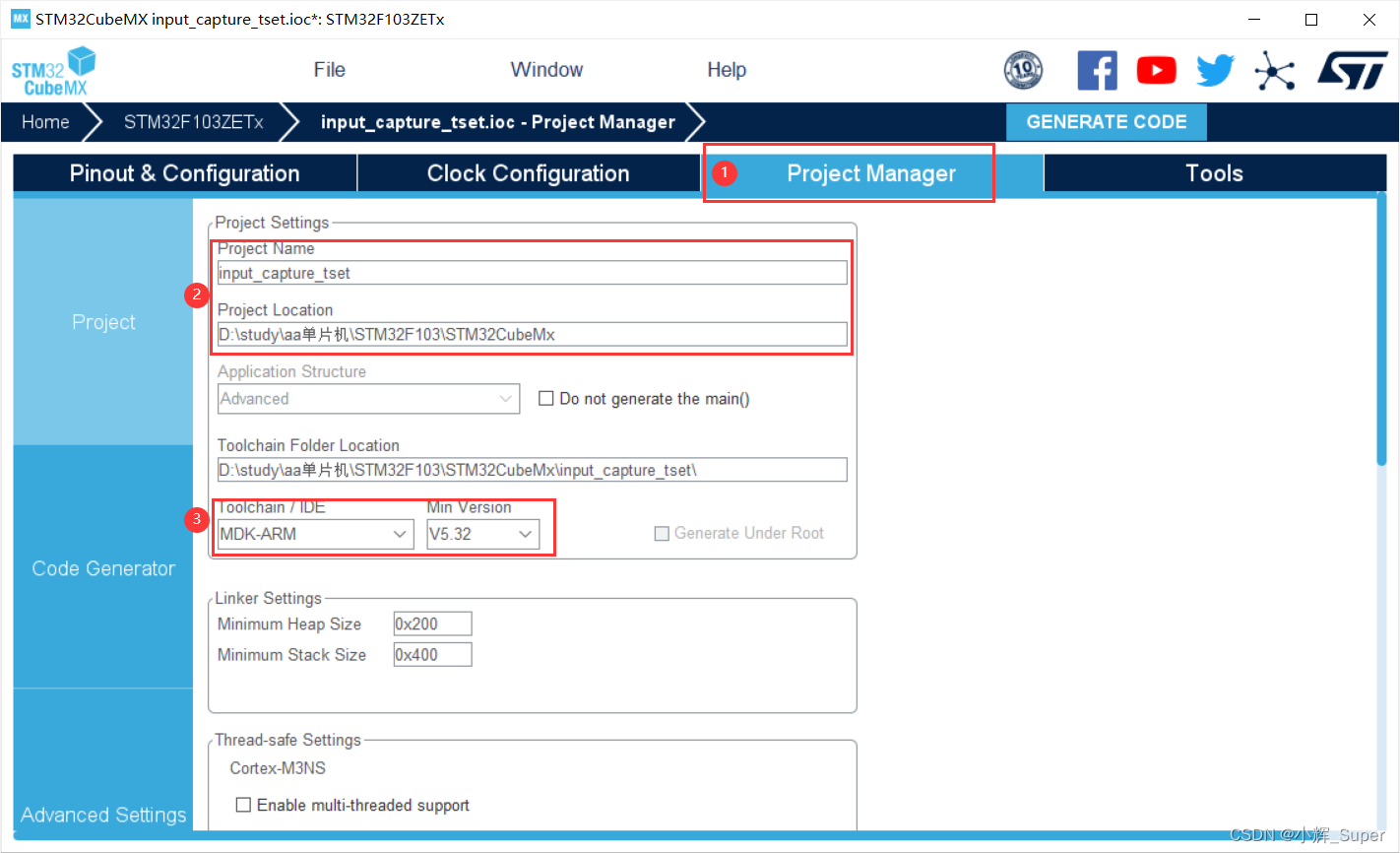
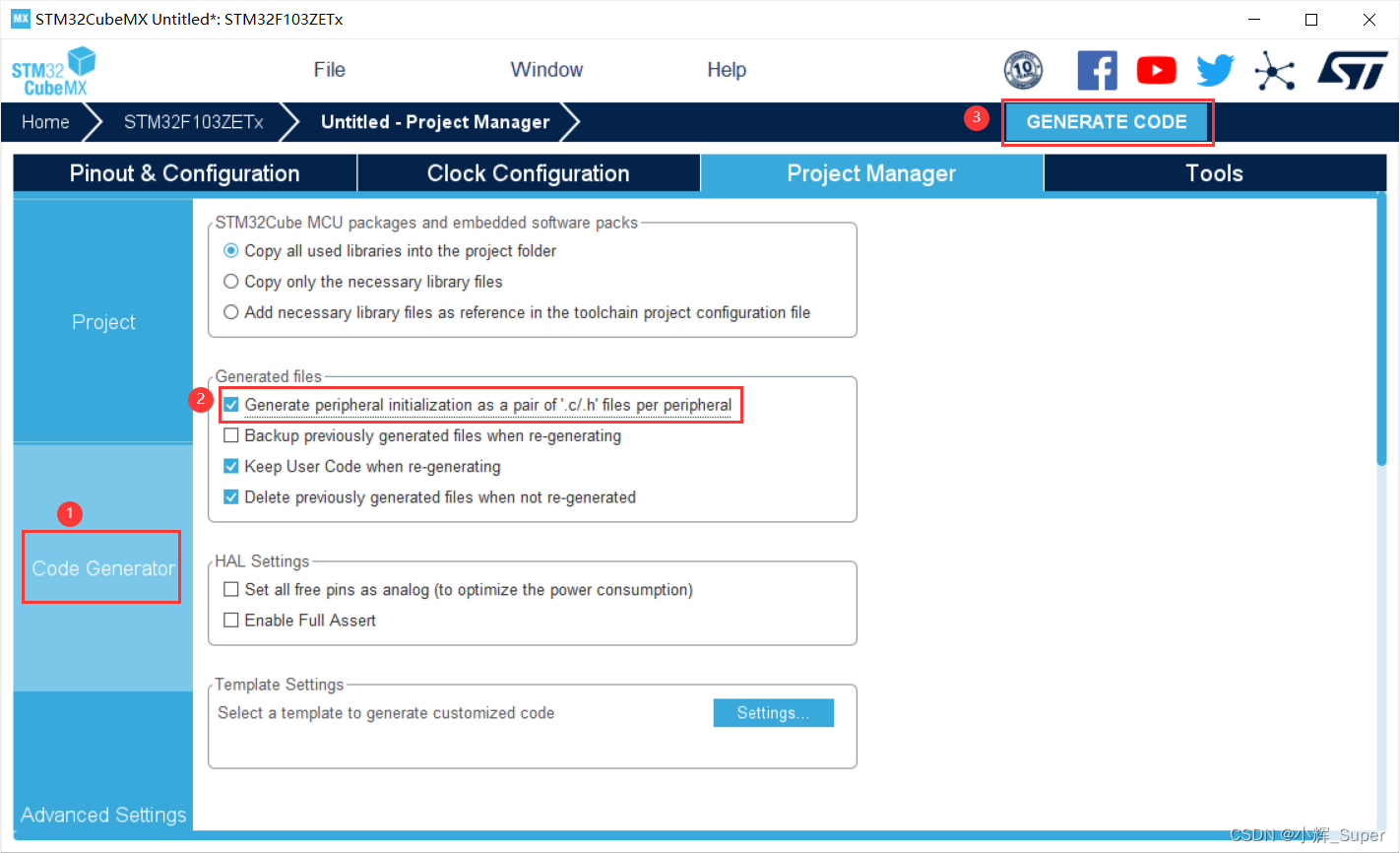
将每种外设的代码存放到不同的 .c /.h 文件中,便于管理(不然都会被放到 main.c 中)。
下面是生成 Keil 工程中关于 TIM2(输入捕获)初始化的代码:
/\* TIM2 init function \*/
void MX\_TIM2\_Init(void)
{
/\* USER CODE BEGIN TIM2\_Init 0 \*/
/\* USER CODE END TIM2\_Init 0 \*/
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_IC_InitTypeDef sConfigIC = {0};
/\* USER CODE BEGIN TIM2\_Init 1 \*/
/\* USER CODE END TIM2\_Init 1 \*/
htim2.Instance = TIM2;
htim2.Init.Prescaler = 72 - 1;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 1000 - 1;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL\_TIM\_Base\_Init(&htim2) != HAL_OK)
{
Error\_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL\_TIM\_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK)
{
Error\_Handler();
}
if (HAL\_TIM\_IC\_Init(&htim2) != HAL_OK)
{
Error\_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL\_TIMEx\_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error\_Handler();
}
sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_RISING;
sConfigIC.ICSelection = TIM_ICSELECTION_DIRECTTI;
sConfigIC.ICPrescaler = TIM_ICPSC_DIV1;
sConfigIC.ICFilter = 0;
if (HAL\_TIM\_IC\_ConfigChannel(&htim2, &sConfigIC, TIM_CHANNEL_1) != HAL_OK)
{
Error\_Handler();
}
/\* USER CODE BEGIN TIM2\_Init 2 \*/
/\* USER CODE END TIM2\_Init 2 \*/
}
七、中断函数写在哪
在使用标准库时,我们是将中断处理写在最底层的中断处理函数中,如 EXTI0_IRQHandler(),但 Hal 库增加了回调函数,将中断底层一些必要的操作 “隐藏” 了起来(如清除中断)。
中断的调用顺序是(以 EXTI0 为例):EXTI0_IRQHandler() —> HAL_GPIO_EXTI_IRQHandler() —> HAL_GPIO_EXTI_Callback()。
TIM2 的中断服务函数已经在 stm32f1xx_it.c 中定义(STM32CubeMX 自动生成的)
/\*\*
\* @brief This function handles TIM2 global interrupt.
\*/
void TIM2\_IRQHandler(void)
{
/\* USER CODE BEGIN TIM2\_IRQn 0 \*/
/\* USER CODE END TIM2\_IRQn 0 \*/
HAL\_TIM\_IRQHandler(&htim2);
/\* USER CODE BEGIN TIM2\_IRQn 1 \*/
/\* USER CODE END TIM2\_IRQn 1 \*/
}
HAL_TIM_IRQHandler() 是 HAL 库的定时器总中断,里面代码很多,这里不展示,我们只需要知道一点——当 TIM2 计数值溢出或发生其他事件(如捕获到上升/下降沿信号)时,系统会执行一系列的中断回调函数,其中包括我们将要用到的 计数溢出回调函数HAL_TIM_PeriodElapsedCallback() 和 输入捕获回调函数HAL_TIM_IC_CaptureCallback()。
八、测试示例
实验中用到了串口,上文配置中没提及,串口配置可以参考 STM32CubeMx 学习(2)USART 串口实验
我的实验代码的核心部分为中断回调函数:
// 定时器计数溢出中断处理回调函数
void HAL\_TIM\_PeriodElapsedCallback(TIM_HandleTypeDef \*htim)
{
if(IC_DONE_FLAG == 0) // 未完成捕获
{
if(IC_START_FLAG == 1) // 已经捕获到了高电平
{
IC_TIMES++; // 捕获次数加一
}
}
}
//定时器输入捕获中断处理回调函数
void HAL\_TIM\_IC\_CaptureCallback(TIM_HandleTypeDef \*htim)// 捕获中断发生时执行
{
if(IC_DONE_FLAG == 0) // 未完成捕获
{
if(IC_START_FLAG == 1) // 原来是高电平,现在捕获到一个下降沿
{
IC_VALUE = HAL\_TIM\_ReadCapturedValue(htim, TIM_CHANNEL_1); // 获取捕获值
TIM\_RESET\_CAPTUREPOLARITY(htim,TIM_CHANNEL_1); // 先清除原来的设置
TIM\_SET\_CAPTUREPOLARITY(htim,TIM_CHANNEL_1,TIM_ICPOLARITY_RISING);// 配置为上升沿捕获
IC_START_FLAG = 0; // 标志复位
IC_DONE_FLAG = 1; // 完成一次高电平捕获
}
else // 捕获还未开始,第一次捕获到上升沿
{
IC_TIMES = 0; // 捕获次数清零
IC_VALUE = 0; // 捕获值清零
IC_START_FLAG = 1; // 设置捕获到了上边沿的标志
TIM\_RESET\_CAPTUREPOLARITY(htim,TIM_CHANNEL_1); // 先清除原来的设置
TIM\_SET\_CAPTUREPOLARITY(htim,TIM_CHANNEL_1,TIM_ICPOLARITY_FALLING);// 配置为下降沿捕获
}
\_\_HAL\_TIM\_SET\_COUNTER(htim,0); // 定时器计数值清零
}
}
完整 main.c
/\* USER CODE BEGIN Header \*/
/\*\*
\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*
\* @file : main.c
\* @brief : Main program body
\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*
\* @attention
\*
\* Copyright (c) 2022 STMicroelectronics.
\* All rights reserved.
\*
\* This software is licensed under terms that can be found in the LICENSE file
\* in the root directory of this software component.
\* If no LICENSE file comes with this software, it is provided AS-IS.
\*
\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*\*
\*/
/\* USER CODE END Header \*/
/\* Includes ------------------------------------------------------------------\*/
#include "main.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"
#include <stdio.h>
/\* Private includes ----------------------------------------------------------\*/
/\* USER CODE BEGIN Includes \*/
/\* USER CODE END Includes \*/
/\* Private typedef -----------------------------------------------------------\*/
/\* USER CODE BEGIN PTD \*/
/\* USER CODE END PTD \*/
/\* Private define ------------------------------------------------------------\*/
/\* USER CODE BEGIN PD \*/
/\* USER CODE END PD \*/
/\* Private macro -------------------------------------------------------------\*/
/\* USER CODE BEGIN PM \*/
/\* USER CODE END PM \*/
/\* Private variables ---------------------------------------------------------\*/
/\* USER CODE BEGIN PV \*/
uint32\_t IC_TIMES; // 捕获次数,单位1ms
uint8\_t IC_START_FLAG; // 捕获开始标志,1:已捕获到高电平;0:还没有捕获到高电平
uint8\_t IC_DONE_FLAG; // 捕获完成标志,1:已完成一次高电平捕获
uint16\_t IC_VALUE; // 输入捕获的捕获值
/\* USER CODE END PV \*/
/\* Private function prototypes -----------------------------------------------\*/
void SystemClock\_Config(void);
/\* USER CODE BEGIN PFP \*/



**既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上大数据知识点,真正体系化!**
**由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、讲解视频,并且后续会持续更新**
**[需要这份系统化资料的朋友,可以戳这里获取](https://bbs.csdn.net/topics/618545628)**
片转存中...(img-ui6L0t3B-1715576964378)]
[外链图片转存中...(img-gQ3GJHvq-1715576964378)]
[外链图片转存中...(img-yLGT0f4P-1715576964378)]
**既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上大数据知识点,真正体系化!**
**由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、讲解视频,并且后续会持续更新**
**[需要这份系统化资料的朋友,可以戳这里获取](https://bbs.csdn.net/topics/618545628)**















 1587
1587











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









