







原理了解
输入捕获模式可以用来测量脉冲宽度或者测量频率,下图以测量脉宽为例来说明输入捕获的原理:
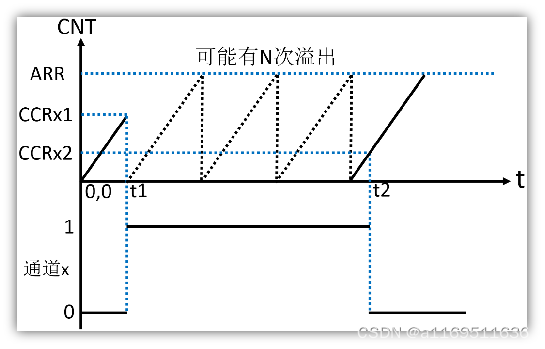
假定设置定时器工作在向上计数模式,图中t2-t1的时间就是需要测量的高电平时间。测量方法如下:
首先设置定时器通道x为上升沿捕获,在t1时刻就会捕获到当前的CNT值并存储到CCRX寄存器中,即图中的CCRx1,接着立即清零CNT,并设置通道x为下降沿捕获,到t2时刻又会发生捕获事件,得到此时的CNT值(记为CCRx2)。在t1-t2之间可能产生N次定时器溢出,因此需要对定时器溢出做处理,防止高电平太长导致数据不准确。 此时t1-t2之间计数的次数为:
N * ARR + CCRx2,再乘以CNT计数周期即可得到高电平持续时间
STM32CubeMx配置
定时器及通道选择
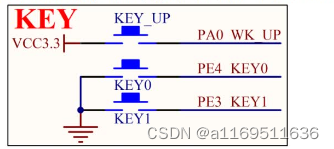
首先选好板子的型号,这里用的是STM32F103ZET6,结合硬件图,既然是输入捕获实验,首先需要一个按键用于输出高电平,即下图PA0:
再结合数据手册:
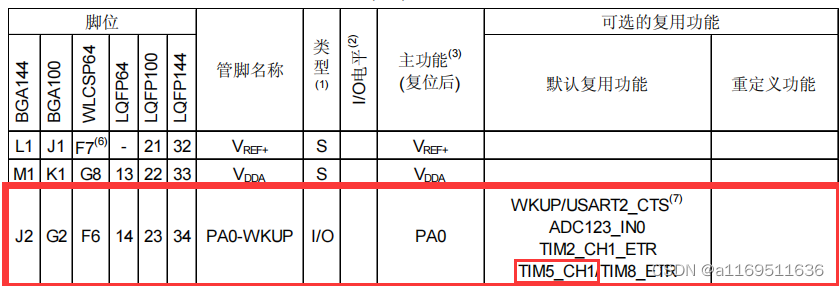
PA0可复用为TIM5_CH1,即配置定时器5通道1为输入捕获模式。
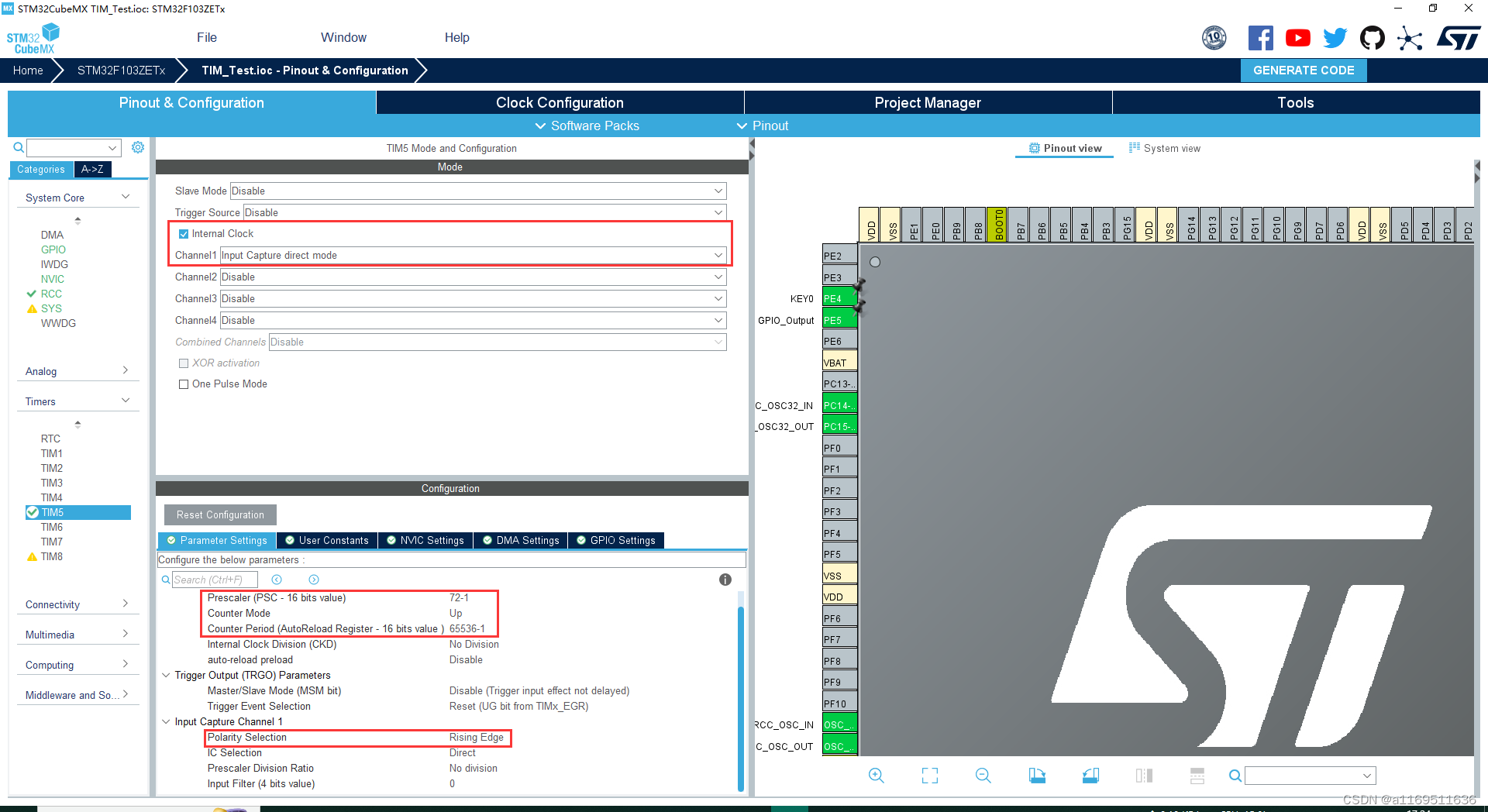
这里开启通道1的输入捕获模式,设定计数频率为1MHz,则根据公式:
Tout= ((arr+1)*(psc+1))/Tclk
Tclk为系统时钟源72M,则算出分频系数psc为72-1,这里设置1MHz是为了精度更加准确,因为是以1MHz的频率计数,则记一个数的时间为频率的倒数即1μs,这里的ARR设置为最大值则是溢出值大了,测量高电平的时间自然就长了,后续函数也会有说明。
然后是设置为上升沿捕获。
PA0配置
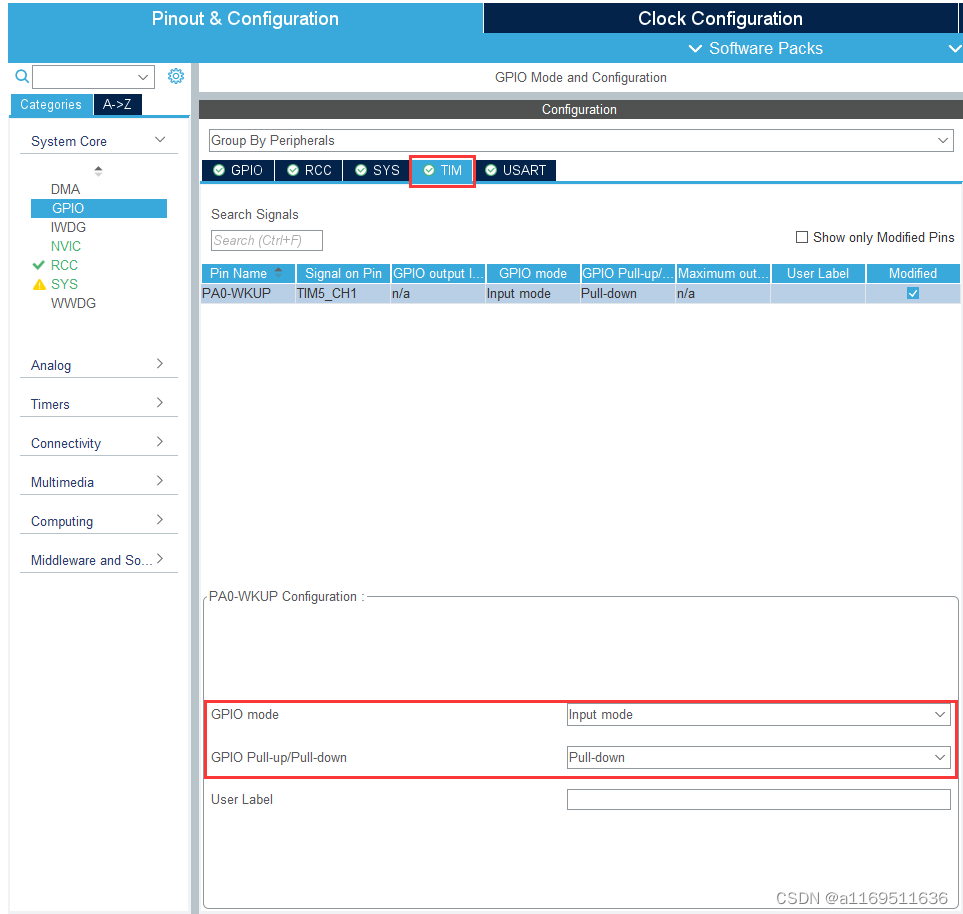
根据上面的硬件原理图这里需要把PA0配置为下拉才能输出高电平。
中断配置
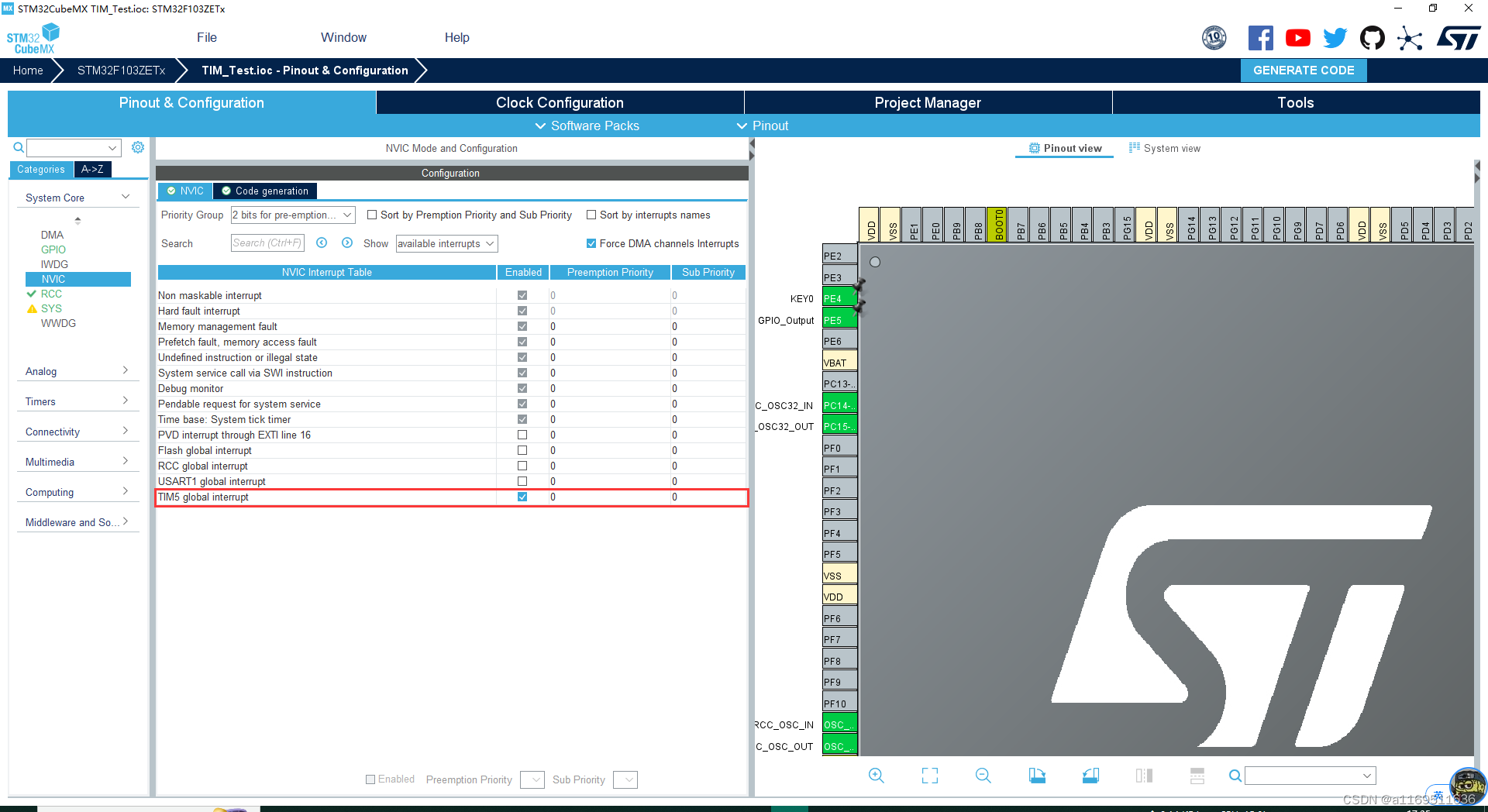
接着是打开定时器5的中断并配置抢占优先级和响应优先级,根据个人所需。接着就可以生成工程了。
工程生成及代码编写
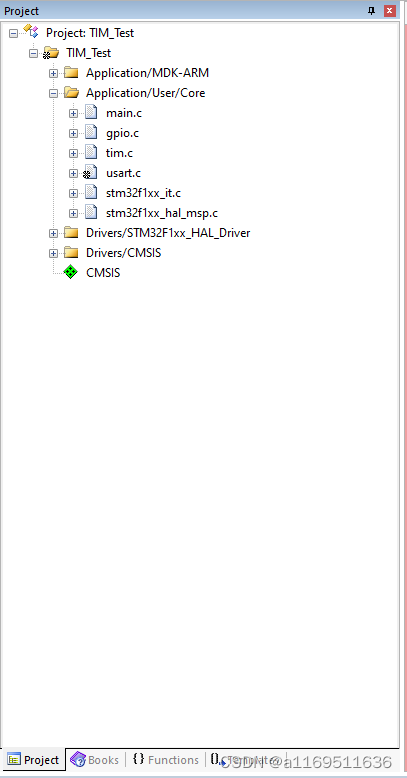
工程生成
生成工程后我们可以看到左边已经有了相关代码
首先配置定时器使用输入捕获模式有如下几个比较重要的函数:
void MX_TIM5_Init(void); //通用定时器5初始化及相关配置
HAL_StatusTypeDef HAL_TIM_Base_Init(TIM_HandleTypeDef *htim); //HAL库定时器初始化函数
HAL_StatusTypeDef HAL_TIM_IC_ConfigChannel(TIM_HandleTypeDef *htim, const TIM_IC_InitTypeDef *sConfig, uint32_t Channel) //HAL库定时器输入捕获配置函数
__HAL_TIM_ENABLE_IT(__HANDLE__, __INTERRUPT__) //宏定义,用于使能定时器更新中断
HAL_StatusTypeDef HAL_TIM_IC_Start_IT(TIM_HandleTypeDef *htim, uint32_t Channel) //使能捕获、捕获中断以及计数器
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim); //捕获中断回调函数
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim); //更新中断回调函数
代码编写
首先打开tim.c,STM32CubeMx已经一键生成了刚刚配置的代码:
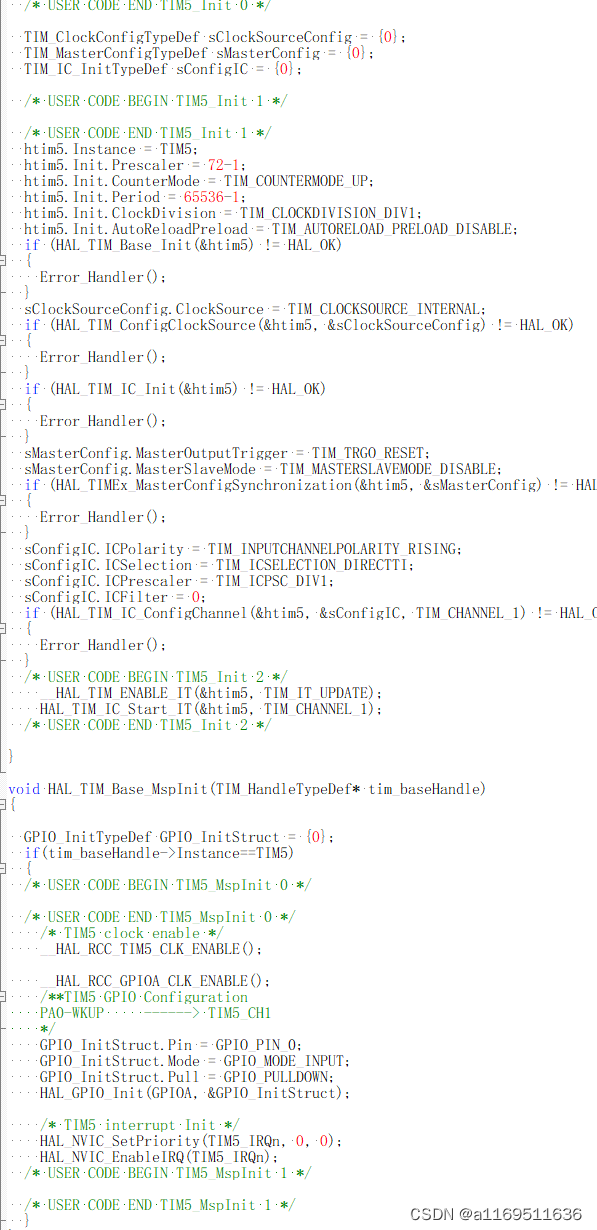
在void MX_TIM5_Init(void)里面已经初始化好了定时器5的相关成员以及配置了对应的输入捕获模式,接着就是使能定时器更新中断以及使能捕获中断,即在用户代码区中添加如下两个函数:
__HAL_TIM_ENABLE_IT(&htim5, TIM_IT_UPDATE);
HAL_TIM_IC_Start_IT(&htim5, TIM_CHANNEL_1);
在void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* tim_baseHandle)中则开启了对应的时钟、配置了PA0以及打开了中断。
中断回调函数编写
接着就是编写中断回调函数,这里新建一个.c以及.h文件方便管理后续代码
GtimIC.c代码如下:
#include "GtimIC.h"
/* 输入捕获状态(g_timxchy_cap_sta)
bit 7 :0,没有成功捕获;1,成功捕获到一次
bit 6 :0,还没捕获到高电平;1,已经捕获到高电平
bit 0~5 :捕获高电平后溢出的次数,最多溢出63次,所以最长捕获值 = 63*65536 + 65536 = 4194303
按1μs记一个数,最长溢出时间即4194303μs,约4.19秒
*/
uint8_t g_timxchy_cap_sta = 0;
uint16_t g_timxchy_cap_val = 0; //记录捕获到低电平时寄存器中的值,即CCRx2
// 进入该函数标明已经发生了一次捕获中断,即捕捉到上升沿或下降沿
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM5)
{
if((g_timxchy_cap_sta & 0x80) == 0) //还未成功捕获高电平
{
if(g_timxchy_cap_sta & 0x40) //上次通过捕获到上升沿将g_timxchy_cap_sta位6置1后并更改为下降沿捕捉,表明这次进入捕获到下降沿
{
g_timxchy_cap_sta |= 0x80; //标记已经成功捕获到一次高电平脉宽
g_timxchy_cap_val = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1); //获取当前的捕获值
/*
清除定时器5原先的设置,并将其捕获改为上升沿捕获进行下一轮判断
*/
TIM_RESET_CAPTUREPOLARITY(htim, TIM_CHANNEL_1);
TIM_SET_CAPTUREPOLARITY(htim, TIM_CHANNEL_1, TIM_INPUTCHANNELPOLARITY_RISING);
}
else //还未开始,第一次捕获上升沿
{
g_timxchy_cap_sta = 0; //清零
g_timxchy_cap_val = 0;
g_timxchy_cap_sta |= 0x40; //标记捕获到上升沿
/*初始化操作
捕获到上升沿后,失能定时器5,并将其计数归零,因为要使用定时器5来进行计数判断脉宽
清除定时器5原先的设置,并将其捕获改为下降沿捕获
重新使能定时器5
*/
__HAL_TIM_DISABLE(htim);
__HAL_TIM_SET_COUNTER(htim, 0);
TIM_RESET_CAPTUREPOLARITY(htim, TIM_CHANNEL_1);
TIM_SET_CAPTUREPOLARITY(htim, TIM_CHANNEL_1, TIM_INPUTCHANNELPOLARITY_FALLING);
__HAL_TIM_ENABLE(htim);
}
}
}
}
//进入该函数表示定时器发生溢出
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM5)
{
if((g_timxchy_cap_sta & 0x80) == 0) //还未成功捕获一次高电平脉宽
{
if(g_timxchy_cap_sta & 0x40) //已经捕获到高电平
{
if((g_timxchy_cap_sta & 0x3f) == 0x3f) //高电平脉宽超出设定值
{
/*
清除定时器5原先的设置,并将其捕获改为上升沿捕获进行下一轮判断
*/
TIM_RESET_CAPTUREPOLARITY(htim, TIM_CHANNEL_1);
TIM_SET_CAPTUREPOLARITY(htim, TIM_CHANNEL_1, TIM_INPUTCHANNELPOLARITY_RISING);
g_timxchy_cap_sta |= 0x80; //标记已经成功捕获到一次高电平脉宽
g_timxchy_cap_val = 0xffff; //高电平脉宽已超出设定值,所以将val设定为最大
}
else //每溢出一次进行++
{
g_timxchy_cap_sta++;
}
}
}
}
}
GtimIC.h代码如下:
#ifndef __GTIM_H
#define __GTIM_H
#include "main.h"
extern uint8_t g_timxchy_cap_sta;
extern uint16_t g_timxchy_cap_val;
#endif
main函数编写
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_TIM5_Init();
/* USER CODE BEGIN 2 */
uint8_t t =0;
uint32_t temp = 0; //存放溢出时间
printf("sys run\r\n");
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
if(g_timxchy_cap_sta & 0x80)
{
temp = g_timxchy_cap_sta & 0x3f; //获取溢出次数
temp *= 65536; //每溢出一次代表计数65536
temp += g_timxchy_cap_val; //最终加上最后记数值即为高电平总时间
printf("HIGH:%d us\r\n", temp);
g_timxchy_cap_sta = 0; //开启下一次捕获
}
/*LED翻转证明程序正常工作*/
t++;
if(t > 20)
{
t = 0;
HAL_GPIO_TogglePin(GPIOE, GPIO_PIN_5);
}
HAL_Delay(10);
}
/* USER CODE END 3 */
}
实现效果
以上就完成了输入捕获模式的代码编写,最终通过串口来将高电平的时间发送至电脑,效果如下:
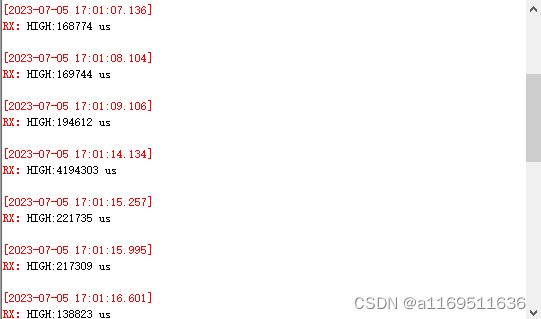
可以看到这里最长的测量时间为4194303μs,若想测量更长则可以更改g_timxchy_cap_sta这个变量为16位。
















 3090
3090











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











