







书接上回,上章我们讲到原理,本章我们来聊聊实现。
在笔者的实际项目经历中,梯形加减速运用的比较广泛,主要以其优秀的加减速能力、对算法实现资源的需求较小、实现难度适中而被广泛应用。下面就简单介绍一下基于MCU的算法实现过程,以STM32为例。
采用“梯形”加减速算法,在运动过程中分成以下四个状态:空闲状态,加速状态,匀速状态与减速状态。
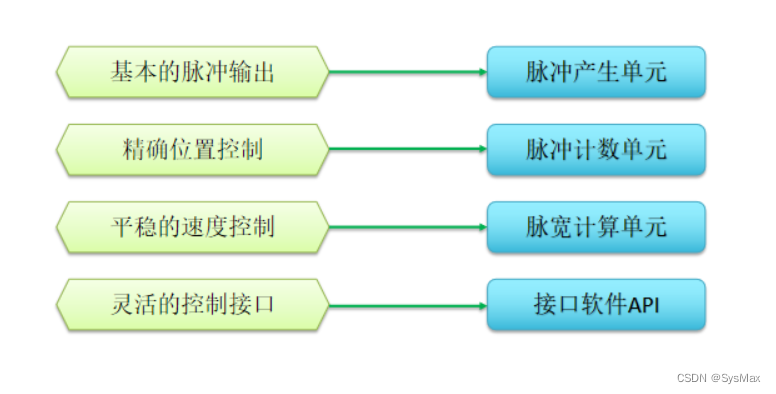
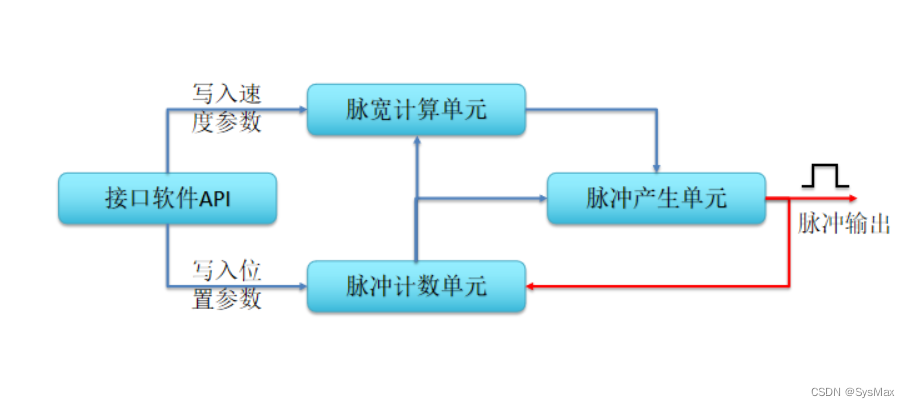
脉冲产生单元:用来产生指定频率的脉冲信号。
脉冲计数单元:用来记录各个运动状态下输出的脉冲个数。
脉宽计算单元:根据总的脉冲个数及记录的各个运动状态下的脉冲输出个数,进行状态跳转及速度计算。
脉冲产生单元
初始化STM32定时器,在定时器中断里面,翻转
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









