







先自我介绍一下,小编浙江大学毕业,去过华为、字节跳动等大厂,目前阿里P7
深知大多数程序员,想要提升技能,往往是自己摸索成长,但自己不成体系的自学效果低效又漫长,而且极易碰到天花板技术停滞不前!
因此收集整理了一份《2024年最新Java开发全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升又不知道该从何学起的朋友。


既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上Java开发知识点,真正体系化!
由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、讲解视频,并且后续会持续更新
如果你需要这些资料,可以添加V获取:xhs1999xhs (备注Java)

正文
目录
一、帧差法
1、概念
帧差法是一种通过对视频图像序列中 相邻两帧作差分运算来获得运动目标轮廓的方法,它可以很好地适用于存在多个运动目标和摄像机移动的情况。
当监控场景中出现异常物体运动时,帧与帧之间会出现较为明显的差别,两帧相减,得到两帧图像 亮度差的绝对值 ,判断它是否大于 阈值 来分析视频或图像序列的运动特性,确定图像序列中有无物体运动。
2、为什么帧差法可以检测运动的物体?
😎还记得小时候的葫芦娃动画吗?每个人物其实都是一张剪纸,也被叫做“剪纸动画”,剪一张就是一帧,假设葫芦娃动画为每秒25帧,1秒内连续播放25张不同的剪纸。
😎因为每一帧之间是有差异的,所以我们可以看到剪纸动起来了。

- 😋博主演示一遍剪纸动画,让大家更直观的感受
博主有以下同一条鲨鱼的不同形态的png图片,使用图片查看来切换显示每一张图片

👀可以看到鲨鱼动起来了!!!
😎因此可以通过判断 前后两帧是否相同 ,来判断是否有运动的物体,即通过帧差法来检测运动的物体。
😁所以下面跟着博主来学习使用OpenCV通过帧差法来进行移动车辆的识别。当然不止可以识别车辆,其他移动的物体也可以识别。
二、使用OpenCV配合帧差法实现车辆识别
- 开发工具
🔎Qt 5.8.0 + OpenCV
1、加载视频
- 通过VideoCapture来加载本地视频,循环读取每一帧并进行显示
int main(int argc, char *argv[])
{
Mat frame;
VideoCapture cap("D:/QT-Project/image/carMove.mp4");
while(cap.read(frame))
{
//读取一帧显示一帧
imshow("frame", frame);
//延时
waitKey(25);
}
return 0;
}
2、灰度处理+帧差计算
- 为了提高计算机的运算速度,图像处理前一般将图像转成灰度图
因为彩色图片是3通道(RGB)24位深度的图像,而灰度图是单通道8位深度的图像,因此处理灰度图比彩色图效率快多了。
- frontMat为前一帧,afterMat为后一帧
//灰度处理
cvtColor(frontMat, frontGray, CV_BGR2GRAY);
cvtColor(afterMat, afterGray, CV_BGR2GRAY);
//帧差处理 找到帧与帧之间运动的物体差异
absdiff(frontGray, afterGray, diffGray);
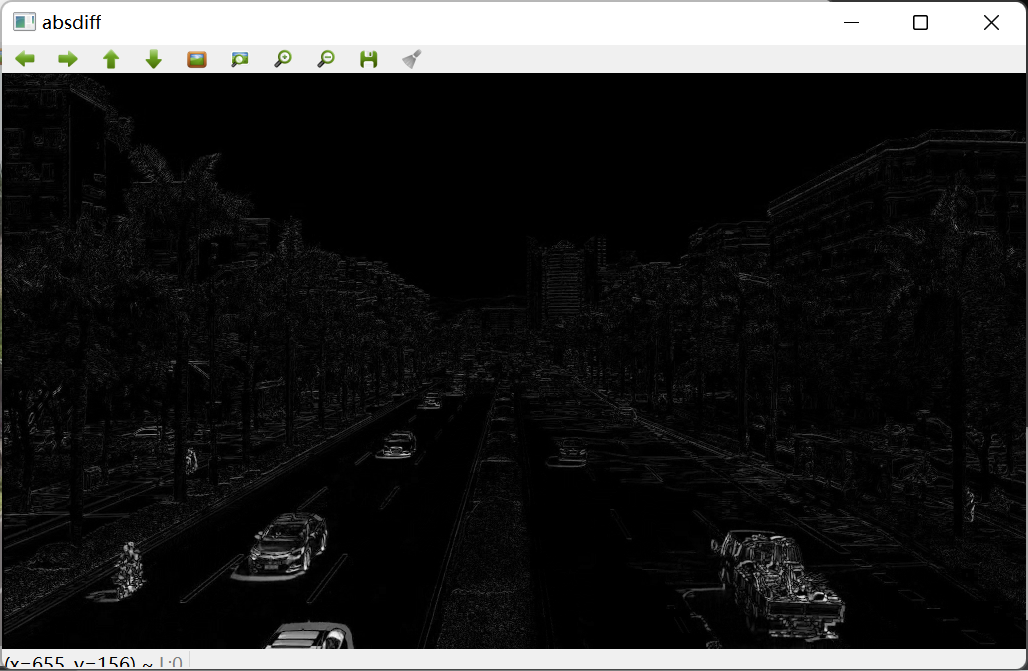
- 效果:原图(左)、处理后(右)
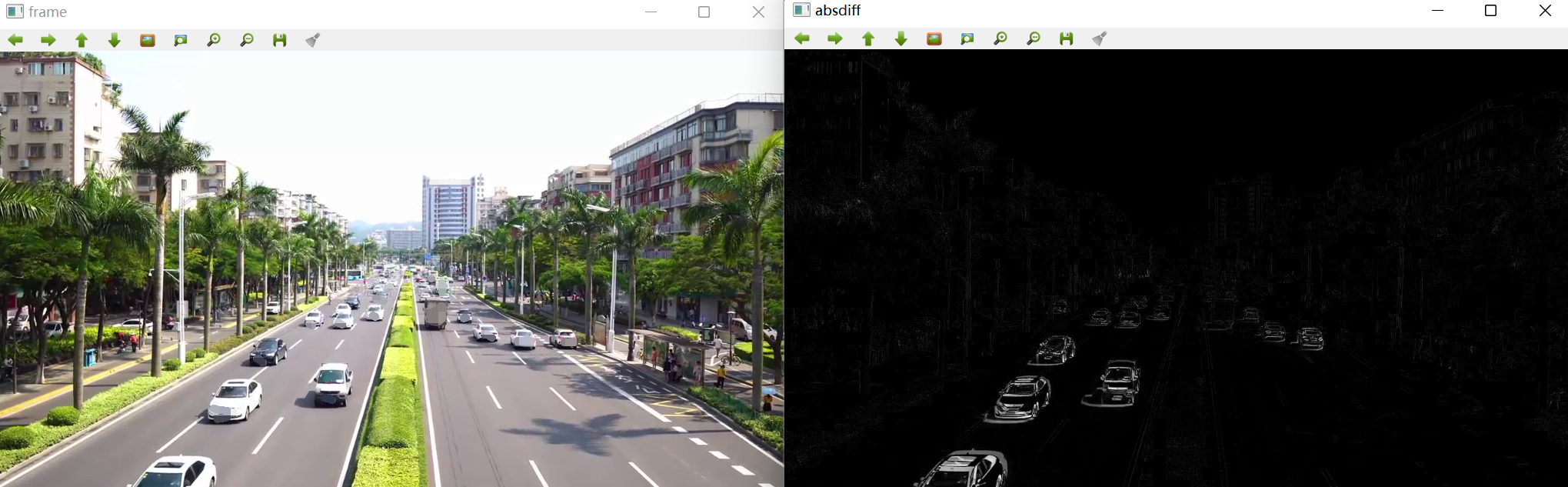
通过下图可以发现检测是检测出来了,但是画面非常的暗淡(不清晰),因此需要通过二值化来让图像更清晰点。
3、二值化
- 通过threshold函数将图像二值化
参数一为原图,参数二为处理后的图,直接将处理后的图覆盖掉原图即可
//二值化:黑白分明 会产生大量白色噪点
threshold(diffGray, diffGray, 25, 255, CV_THRESH_BINARY);
- 下面是二值化处理过后的效果
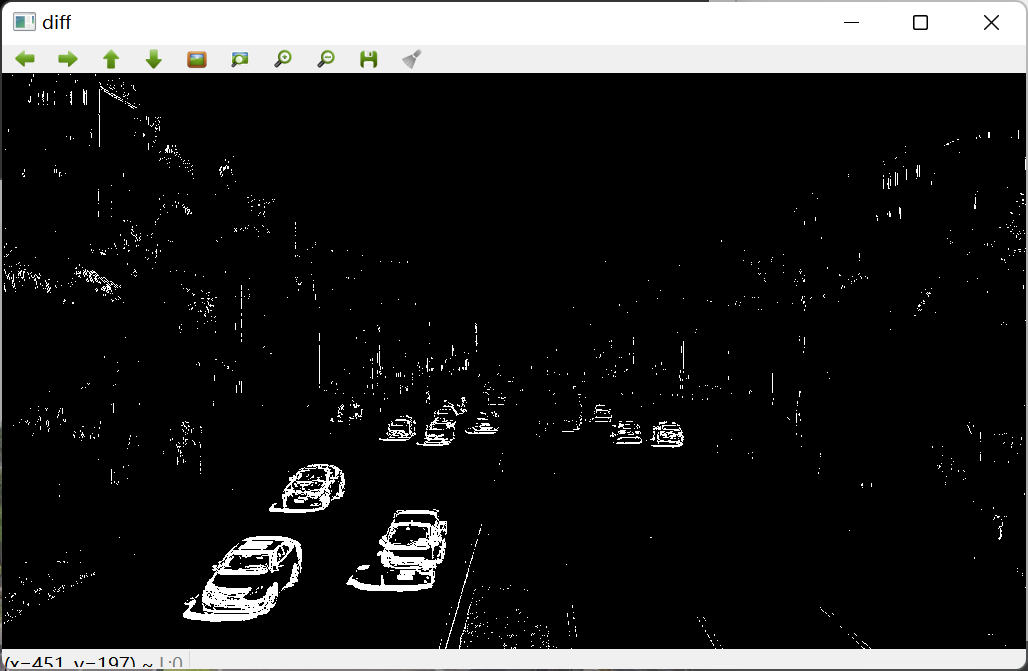
可以发现图像确实是变“清晰”了,因为二值化后的图像只有黑白两种颜色。并且我们还可以发现白色噪点非常多,因为摄像机抖动,风吹树叶等原因,因此还需要通过腐蚀来去除掉这些白色噪点。
4、腐蚀
- 概念
腐蚀是针对图片的二值化数据进行操作的,主要是针对高亮部分。使用算法,将图像的边缘腐蚀掉。作用就是将目标的边缘的“毛刺”踢除掉。
如下图所示:

- 通过erode函数将图像进行腐蚀
//腐蚀处理:去除白色噪点 噪点不能完全去除,反而主要物体会被腐蚀的图案都变得不明显
Mat element = cv::getStructuringElement(MORPH_RECT, Size(3, 3));
erode(diffGray, diffGray, element);
- 下面是腐蚀之后的效果
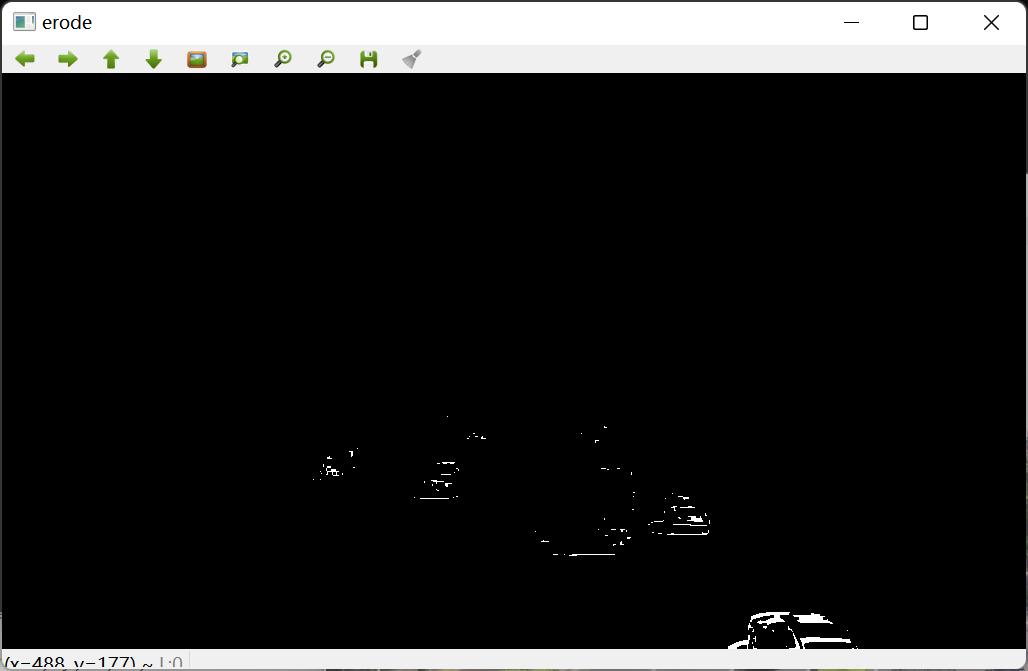
😧白色噪点确实是被去除了,但是我们的车辆也被腐蚀的不成车样(内部坑坑洼洼的),所以还需要通过膨胀将车辆进行进一步处理。
5、膨胀
- 概念
膨胀是针对图片的二值化数据进行操作的,主要是针对高亮部分。使用算法,将图像的边缘扩大些。作用就是将目标的边缘或者是内部的坑填掉。
如下图所示:

- 通过dilate函数将图像进行膨胀
//膨胀处理:将白色区域变“胖”
Mat element2 = cv::getStructuringElement(MORPH_RECT, Size(20, 20));
dilate(diffGray, diffGray, element2);
- 下面是膨胀之后的效果
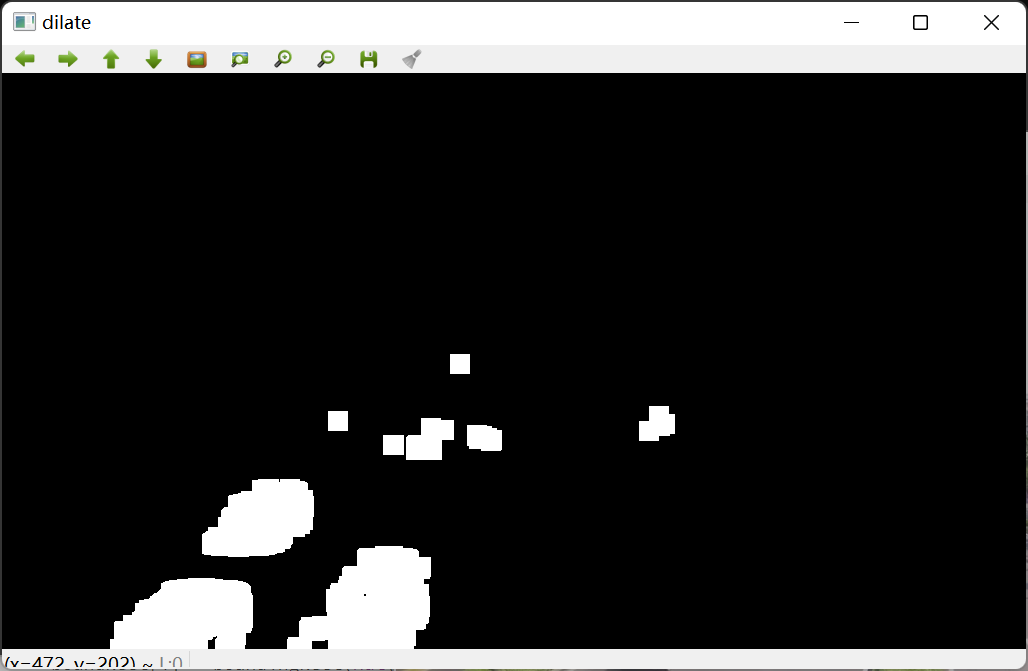
我们的车辆变成一个个大方块了,做到这一步差不多就可以来标记运动的车辆了,只要画矩形将白色大方块框起来即可。
6、框选出车辆
- 下面是用白色的框框,框选出来的效果
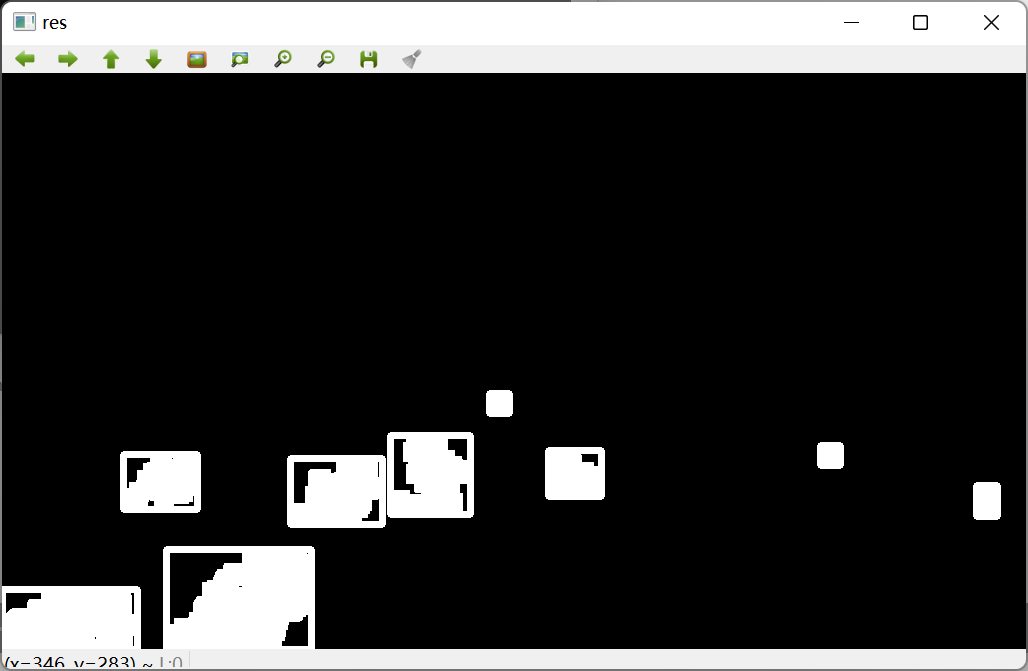
框选的原理就是找到白色方块最左边的点与最右边的点,得到之间的大小差距(矩形宽),找到白色方块最上边的点与最下边的点,得到之间的大小差距(矩形高)。
通过宽高即可画出一个把白色方块包含在内的矩形,矩形左上角坐标通过白色方块最上方的值和最左方的值来确定。
- 我们只要将白色方框改个显眼的颜色,并在原视频的对应位置画出这个框框即可。下面附全部代码。
三、全部代码+实现效果
1、代码
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
//帧差法检测车辆
Mat MoveCheck(Mat &frontMat, Mat &afterMat)
{
Mat frontGray ,afterGray, diffGray;
Mat resframe = afterMat.clone();
//灰度处理
cvtColor(frontMat, frontGray, CV_BGR2GRAY);
cvtColor(afterMat, afterGray, CV_BGR2GRAY);
//imshow("GRAY", frontGray);
//帧差处理 找到帧与帧之间运动的物体差异
//缺点:会把其他运动物体也算进来
absdiff(frontGray, afterGray, diffGray);
//imshow("absdiff", diffGray);
//二值化:黑白分明 会产生大量白色噪点
threshold(diffGray, diffGray, 25, 255, CV_THRESH_BINARY);
//imshow("diff", diffGray);
//腐蚀处理:去除白色噪点 噪点不能完全去除,反而主要物体会被腐蚀的图案都变得不明显
Mat element = cv::getStructuringElement(MORPH_RECT, Size(3, 3));
erode(diffGray, diffGray, element);
//imshow("erode", diffGray);
//膨胀处理:将白色区域变“胖”
Mat element2 = cv::getStructuringElement(MORPH_RECT, Size(20, 20));
dilate(diffGray, diffGray, element2);
//imshow("dilate", diffGray);
//动态物体标记
vector<vector<Point>> contours; //保存关键点
findContours(diffGray, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE, Point(0, 0));
//提取关键点
vector<vector<Point>> contours_poly(contours.size());
vector<Rect> boundRect(contours.size());
int x, y, w, h;
int num = contours.size();
for(int i =0; i< num; i++)
{
approxPolyDP(Mat(contours[i]), contours_poly[i], 3, true);
boundRect[i] = boundingRect(Mat(contours_poly[i]));
x = boundRect[i].x;
y = boundRect[i].y;
w = boundRect[i].width;
h = boundRect[i].height;
//绘制
rectangle(resframe, Point(x, y), Point(x+w, y+h), Scalar(0, 255, 0), 4);
}
return resframe;
}
int main(int argc, char *argv[])
{
Mat frame;
Mat tempframe;
Mat res;
int count = 0;
VideoCapture cap("D:/QT-Project/image/carMove.mp4");
while(cap.read(frame))
{
count++;
if(count == 1)
{
res = MoveCheck(frame, frame);
}
else
{
res = MoveCheck(tempframe, frame);
}
tempframe = frame.clone();
imshow("frame", frame);//原视频帧
imshow("res", res);//框选后的视频帧
waitKey(25);
}
return 0;
}
2、车辆检测效果
四、帧差法存在不足之处
- 相机抖动+起风了
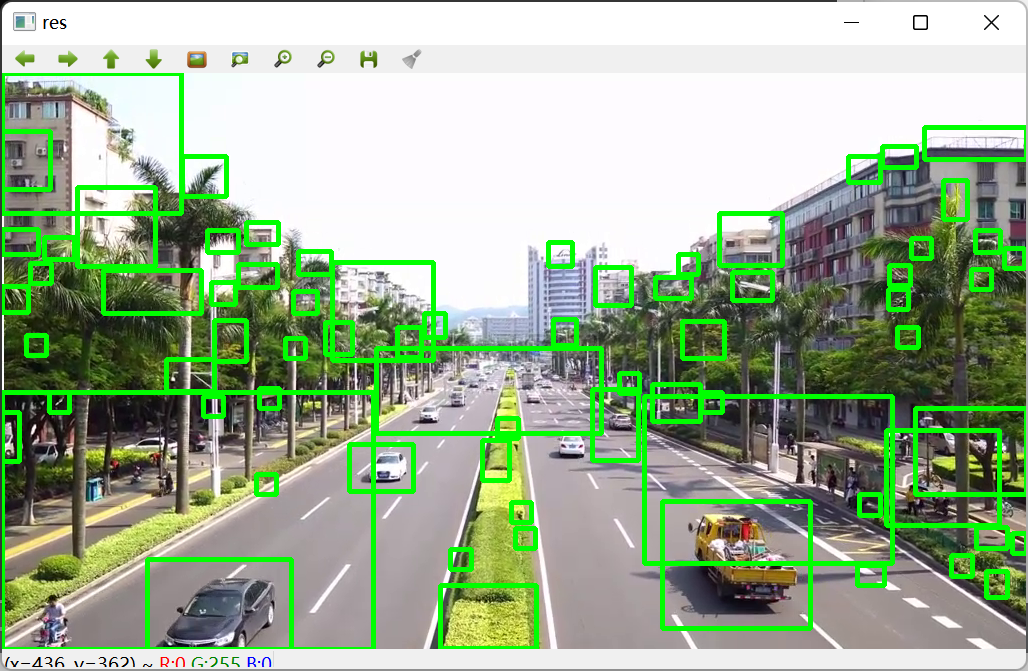
帧差法虽然能够检测出运动的车辆,但是不仅包括车辆,任何运动的物体都会检测出来,就像上图所示,一旦相机抖动或者突然起大风,运动的物体就多了起来(两帧差异的地方很多),因此就会出现上面那种情况。
😘The end ……🔚
原创不易,转载请标明出处。
对您有帮助的话可以一键三连,会持续更新的(嘻嘻)。
最后
针对最近很多人都在面试,我这边也整理了相当多的面试专题资料,也有其他大厂的面经。希望可以帮助到大家。
最新整理面试题

上述的面试题答案都整理成文档笔记。也还整理了一些面试资料&最新2021收集的一些大厂的面试真题
最新整理电子书

最新整理大厂面试文档

以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持。
网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
需要这份系统化的资料的朋友,可以添加V获取:xhs1999xhs (备注Java)

一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
面经。希望可以帮助到大家。
最新整理面试题
[外链图片转存中…(img-U8FF0FsA-1713683761385)]
上述的面试题答案都整理成文档笔记。也还整理了一些面试资料&最新2021收集的一些大厂的面试真题
最新整理电子书
[外链图片转存中…(img-instT1Gn-1713683761386)]
最新整理大厂面试文档
[外链图片转存中…(img-R9JXRvJ7-1713683761386)]
以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持。
网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
需要这份系统化的资料的朋友,可以添加V获取:xhs1999xhs (备注Java)
[外链图片转存中…(img-PWZW8lqA-1713683761386)]
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!















 991
991











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









