






摘要
使用蜣螂优化算法(Dung Beetle Optimization, DBO),本文提出了一种无人机三维路径规划方法。该算法借鉴蜣螂导航行为,结合无人机避障需求,在复杂三维环境中生成最优路径。实验结果表明,基于DBO的路径规划在效率和路径质量方面优于其他优化算法。
理论
蜣螂优化算法模仿蜣螂通过观察太阳、月亮和银河导航的行为。蜣螂在移动时通过天文导航调整方向,以最短的路径到达目的地。将此机制用于无人机三维路径规划,主要步骤如下:
-
路径初始化:随机生成无人机初始路径。
-
适应度函数:根据路径长度、能量消耗、避障程度等因素评估路径优劣。
-
导航行为模拟:模拟蜣螂的导航模式,基于环境中障碍物和目标位置动态调整路径。
-
局部优化:使用局部搜索进一步微调路径,避免局部最优。
实验结果
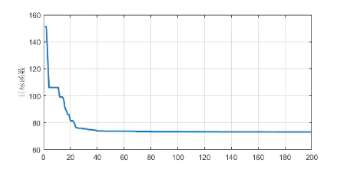
图中展示了实验的结果,通过蜣螂优化算法,无人机能够有效避开障碍物,生成平滑的三维飞行路径。各图具体说明如下:
图1:显示了无人机在复杂三维地形中的飞行路径,以及多个关键位置标注(红色)。
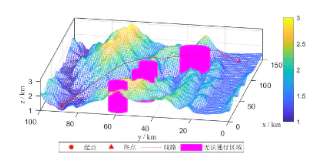
图2:展示路径的2D投影图。
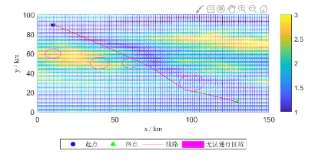
图3:等高线图,突出路径在不同地形上的表现。
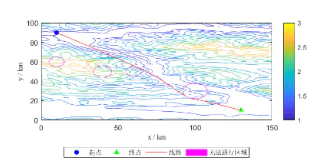
图4:优化迭代过程中的适应度值变化图,显示出算法快速收敛。
部分代码
% 初始化路径
numPoints = 50; % 路径点数
path = rand(3, numPoints); % 随机初始路径
% 适应度函数
function cost = fitness(path)
dist = sum(sqrt(sum(diff(path, 1, 2).^2, 1))); % 路径距离
% 添加避障成本等其他因素
cost = dist; % 简化示例,仅考虑距离
end
% 蜣螂导航行为
function newPath = dungBeetleOptimization(path)
% 更新路径的代码
for i = 1:length(path)
% 蜣螂行为模拟,例如调整方向
path(:, i) = path(:, i) + randn(3, 1) * 0.1; % 随机小幅度调整
end
newPath = path;
end
% 主程序
iterations = 100;
for iter = 1:iterations
path = dungBeetleOptimization(path); % 调整路径
cost = fitness(path);
disp(['Iteration ' num2str(iter) ': Cost = ' num2str(cost)]);
end
参考文献
❝
Dorigo, M., and Stützle, T., Ant Colony Optimization, MIT Press, 2004.
Kennedy, J., and Eberhart, R. C., "Particle Swarm Optimization," Proceedings of IEEE International Conference on Neural Networks, 1995.
Schmitt, L. M., "Theory of Genetic Algorithms," Theoretical Computer Science, vol. 259, 2001.
(文章内容仅供参考,具体效果以图片为准) 















 588
588

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









