







收集整理了一份《2024年最新物联网嵌入式全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升的朋友。
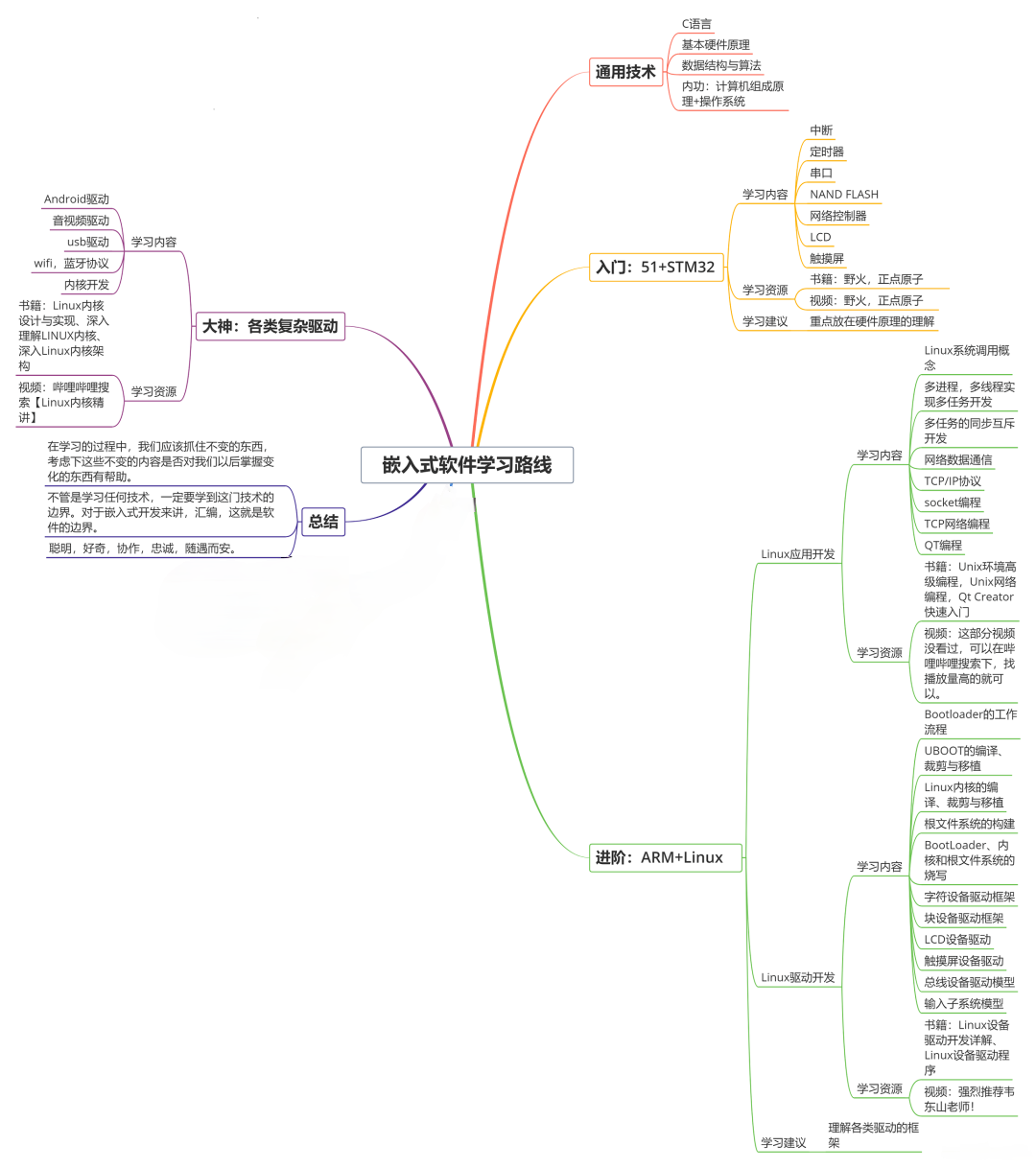
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人
都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
入口参量:(TIM3, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising ,TIM_ICPolarity_Rising);
通过这样配置,我们就完成了编码器软件的初始化。通过以上配置,我们完成了TIM3输入捕获的初始化以及编码器接口模式的相关配置,每来一个跳变沿,计数值变化一次。
至此,为了避免我们忘了初衷,现在我们来回顾一下我们最开始用编码器的初衷,前面我们说要用编码器来干嘛来着?获取电机转动角度、转速。
现在的处境是,我们通过STM32的TIM3的编码器模式,能够测出任意时刻的脉冲值了。现在要解决的就是如何将这个脉冲值转换成我们所要得到的信息(即转动角度、转速)。
首先,根据带编码器的直流减速电机的原理,显然无论电机的转速如何,每转产生的脉冲数是固定的。这里假设电机每转产生260个脉冲(具体数据各位自行查看自己的电机参数啦),那么只要我们用‘电机已产生的脉冲数’除以‘260个/转’,就可以得到电机转了多少圈,一圈即为360度,由此便可将脉冲数和转动角度联系起来。
这里要注意一点,由于我们用的是编码器模式3(也就是TIM_EncoderMode_TI12),我们得到的脉冲数是电机实际产生的脉冲数的四倍。则电机实际产生的脉冲数应为‘得到的计数值’除以4。于是,电机转动圈数为脉冲数除以260再除以4。
转动角度算出来了,转速呢?则是根据计数方向(递增计数或递减计数)来判断的,所以我们接下来的工作就是要搞清楚计数方向和编码器信号的关系。
让我们来看一下STM32的中文参考手册:
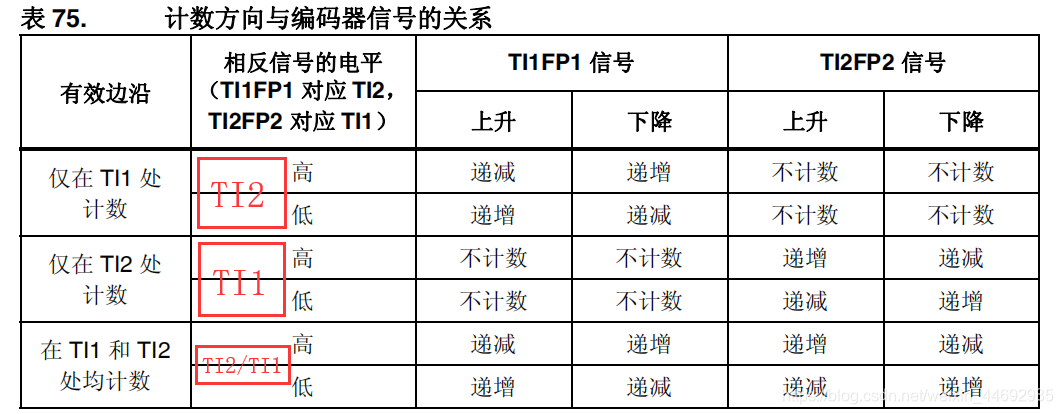
网上几乎在这张表的讲解上都是一带而过,真正能把这张表讲清楚的几乎没有。后来看到一个人在表格上做了类似上图的注释,我才终于搞懂了。
大家还记得我们前面提到的TIM_EncoderInterfac
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 5301
5301

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









