



概述
- PID是比例 列(Proportional)、积分(Integral)、微分(Differential)的缩写
- PID是一种闭环控制算法,它动态改变施加到被控对象的输出值(Out),使得被控对象某一物理量的实际值(Actual),能够快速、准确、稳定地跟踪到指定的目标值 (Target)PID的任务是使误差始终为0
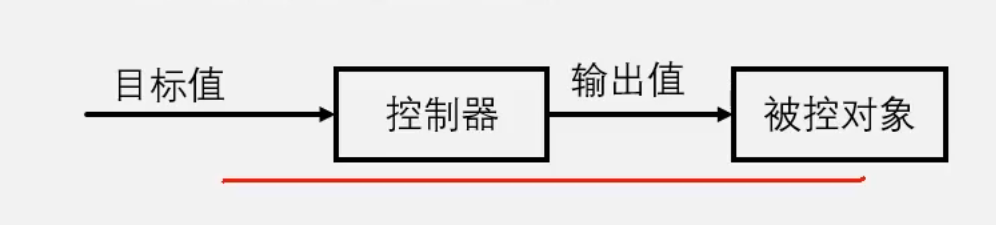
开环和闭环
- 开环(OpenLoop):控制器单向输出值给被控对象,不获取被控对象的反馈,控制器对被控对象的执行状态不清楚
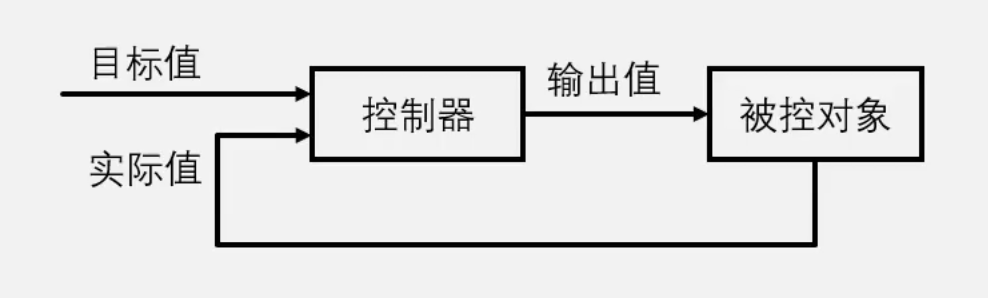
- 闭环(Closed Loop):控制器输出值给被控对象,同时获取被控对象的反馈控制器知道被控对象的执行状态,可以根据反馈修改输出值以优化控制
各项具体解释
比例项P
- 只含有比例项的PID输出值:
o u t ( t ) = K p ∗ e r r o r ( t ) out(t) = K_p * error(t) out(t)=Kp∗error(t) (error=目标值减实际值) - 比例项的输出值仅取决于当前时刻的误差,与历史时刻无关。当前存在误差时,比例项输出一个与误差呈正比的值,当前不存在误差时,比例项输出0
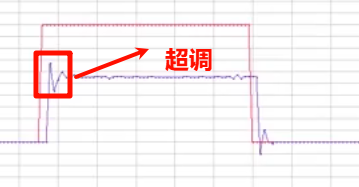
- K p K_p Kp越大,比例项权重越大,系统响应越快,但超调也会随之增加
- 纯比例项控制时,系统一般会存在稳态误差,
K
p
K_p
Kp越大,稳态误差越小
稳态误差
- PID稳态误差:系统进入稳态时,实际值和目标值始终存在一个稳定的差值
- 稳态误差产生原因:纯比例项控制时,若误差为0,则比例项结果也为0。被控对象输入0时,一般会自发地向一个方向偏移,产生误差。产生误差后,误差非0,比例项负反馈调控输出,当调控输出力度和自发偏移力度相同时,系统达到稳态
- 判断是否会产生稳态误差:给被控对象输入0,判断被控对象会不会自发偏移
- 判断稳态误差的方向:给被控对象输入0,自发偏移方向即为稳态误差方向
积分项I
- 一般配合P使用,也叫做PI控制(电机控速器定速控制)
- 含有比例项和积分项的PID输出值:
o u t ( t ) = K p ∗ e r r o r ( t ) + K i ∗ ∫ 0 t e r r o r ( t ) d t out(t) = K_p * error(t) + K_i * \int_{0}^{t} error(t)dt out(t)=Kp∗error(t)+Ki∗∫0terror(t)dt - 积分项的输出值取决于0~t所有时刻误差的积分,与历史时刻有关。积分项将历史所有时刻的误差累积,乘上积分项系数 K i K_i Ki后作为积分项输出值
- 积分项用于弥补纯比例项产生的稳态误差,若系统持续产生误差,则积分项会不断累积误差,直到控制器产生动作,让稳态误差消失
- K i K_i Ki越大,积分项权重越大,稳态误差消失越快,但系统滞后性也会随之增加
微分项D
-
一般配合PI或单独配合P使用(电机定位控制,平衡摆)
-
含有比例项、积分项和微分项的PID输出值:
o u t ( t ) = K p ∗ e r r o r ( t ) + K i ∗ ∫ 0 t e r r o r ( t ) d t + K d ∗ d e r r o r ( t ) d t out(t) = K_p * error(t) + K_i * \int_{0}^{t} error(t)dt + K_d * \frac{derror(t)}{dt} out(t)=Kp∗error(t)+Ki∗∫0terror(t)dt+Kd∗dtderror(t) -
微分项的输出值取决于当前时刻误差变化的斜率,与当前时刻附近误差变化的趋势有关。当误差急剧变化时,微分项会负反馈输出相反的作用力,阻碍误差急剧变化
-
斜率一定程度上反映了误差未来的变化趋势,这使得微分项具有“预测未来,提前调控”的特性
-
微分项给系统增加阻尼,可以有效防止系统超调,尤其是惯性比较大的系统
-
K d K_d Kd越大,微分项权重越大,系统阻尼越大,但系统卡顿现象也会随之增加
形式
离散型PID
o u t ( k ) = K p ∗ e r r o r ( k ) + K i ∗ ∑ j = 0 k e r r o r ( j ) + K d ∗ ( e r r o r ( k ) − e r r o r ( k − 1 ) ) out(k) = K_p * error(k) + K_i * \sum_{j = 0}^{k} error(j) + K_d * (error(k) - error(k - 1)) out(k)=Kp∗error(k)+Ki∗∑j=0kerror(j)+Kd∗(error(k)−error(k−1))
无论哪种情景下用哪种PID都可以
位置式PID/全量式PID
- 不止能控制位置,几乎能覆盖所有PID应用场景,速度控制、位置控制,温度控制姿态控制
o u t ( k ) = K p ∗ e r r o r ( k ) + K i ∗ ∑ j = 0 k e r r o r ( j ) + K d ∗ ( e r r o r ( k ) − e r r o r ( k − 1 ) ) out(k) = K_p * error(k) + K_i * \sum_{j = 0}^{k} error(j) + K_d * (error(k) - error(k - 1)) out(k)=Kp∗error(k)+Ki∗∑j=0kerror(j)+Kd∗(error(k)−error(k−1))
增量式PID
Δ
o
u
t
(
k
)
=
K
p
∗
(
e
r
r
o
r
(
k
)
−
e
r
r
o
r
(
k
−
1
)
)
+
K
i
∗
e
r
r
o
r
(
k
)
+
K
d
∗
(
e
r
r
o
r
(
k
)
−
2
∗
e
r
r
o
r
(
k
−
1
)
+
e
r
r
o
r
(
k
−
2
)
)
\Delta out(k) = K_p * (error(k) - error(k - 1)) + K_i * error(k) + K_d * (error(k) - 2 * error(k - 1) + error(k - 2))
Δout(k)=Kp∗(error(k)−error(k−1))+Ki∗error(k)+Kd∗(error(k)−2∗error(k−1)+error(k−2))
用
o
u
t
+
=
Δ
o
u
t
out+=\Delta out
out+=Δout增量式和位置式没有差别
调参
- 一般是按P,I,D顺序调
- 数量级看 输出范围/输入范围

















 1525
1525

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









