







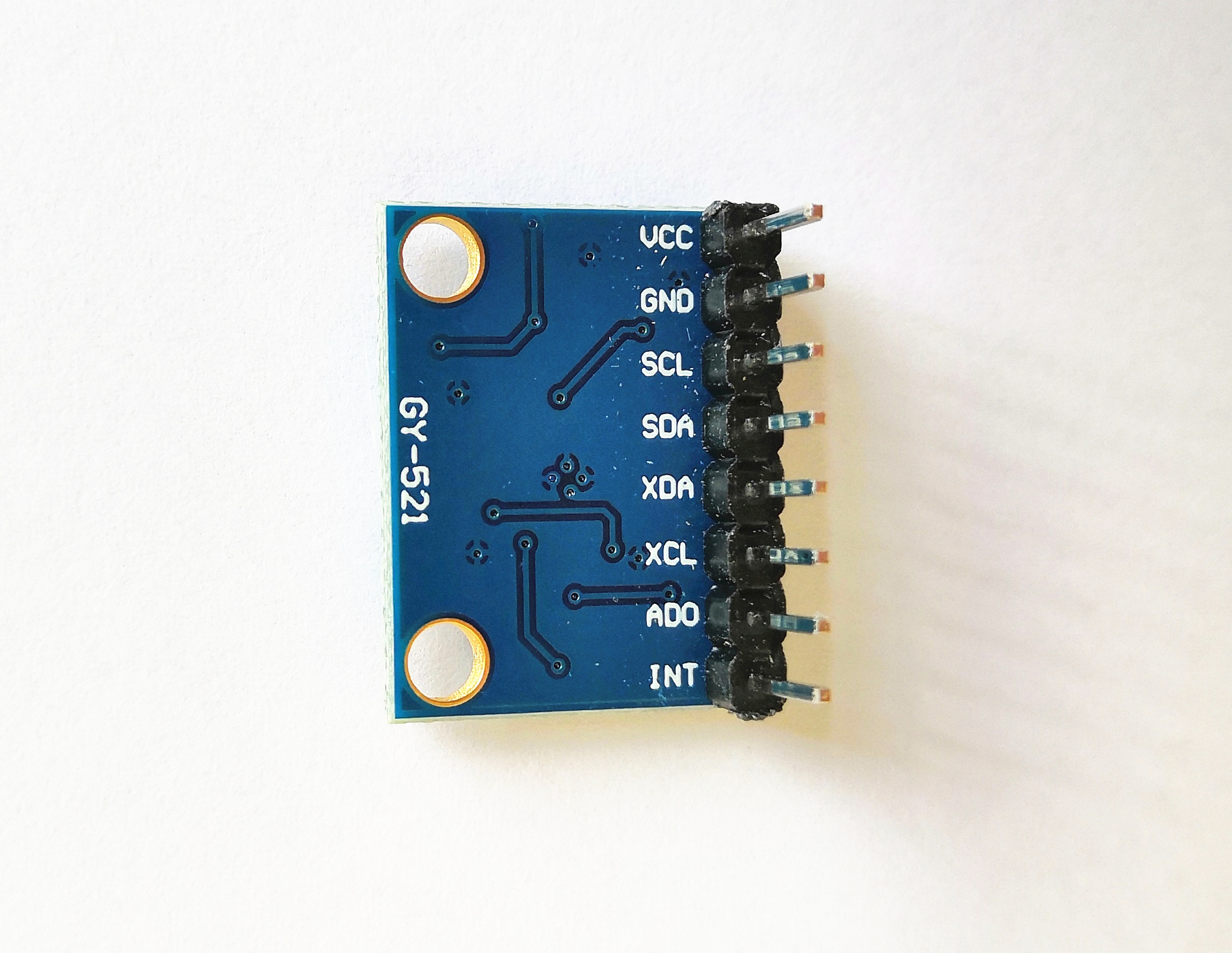
★MPU6050陀螺仪加速度传感器模块*1
★面包板*1
★跳线若干
三、实验原理


MPU6050的工作原理比较复杂,需要深度学习最好是学习官方手册,本文只做简单介绍,不少内容我也蒙逼状态中。
详细资料可在官网下载最新的芯片手册:
https://invensense.tdk.com/products/motion-tracking/6-axis/mpu-6050/


1.传感器
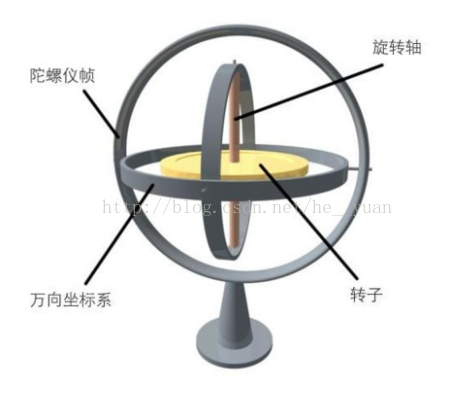
①陀螺仪传感器:
陀螺仪的原理就是,一个旋转物体的旋转轴所指的方向在不受外力影响时,是不会改变的。人们根据这个道理,用它来保持方向。然后用多种方法读取轴所指示的方向,并自动将数据信号传给控制系统。我们骑自行车其实也是利用了这个原理。轮子转得越快越不容易倒,因为车轴有一股保持水平的力量。
现代陀螺仪可以精确地确定运动物体的方位的仪器,它在现代航空,航海,航天和国防工业中广泛使用的一种惯性导航仪器。传统的惯性陀螺仪主要部分有机械式的陀螺仪,而机械式的陀螺仪对工艺结构的要求很高。
70年代提出了现代光纤陀螺仪的基本设想,到八十年代以后,光纤陀螺仪就得到了非常迅速的发展,激光谐振陀螺仪也有了很大的发展。光纤陀螺仪具有结构紧凑,灵敏度高,工作可靠。光纤陀螺仪在很多的领域已经完全取代了机械式的传统的陀螺仪,成为现代导航仪器中的关键部件。光纤陀螺仪同时发展的除了环式激光陀螺仪外。
MPU-60X0由三个独立的振动MEMS速率陀螺仪组成,可检测旋转角度X轴,Y轴和Z轴。 当陀螺仪围绕任何感应轴旋转时,科里奥利效应就会产生电容式传感器检测到的振动。 所得到的信号被放大,解调和滤波产生与角速度成比例的电压。 该电压使用单独的片内数字化16位模数转换器(ADC)对每个轴进行采样。 陀螺仪传感器可以全面范围的被数字编程为每秒±250,±500,±1000或±2000度(dps)。 ADC样本速率可以从每秒8,000个采样点编程到每秒3.9个采样点,并且可由用户选择低通滤波器可实现广泛的截止频率。
②加速度传感器:
加速度传感器是一种能够测量加速度的传感器。通常由质量块、阻尼器、弹性元件、敏感元件和适调电路等部分组成。传感器在加速过程中,通过对质量块所受惯性力的测量,利用牛顿第二定律获得加速度值。根据传感器敏感元件的不同,常见的加速度传感器包括电容式、电感式、应变式、压阻式、压电式等。
MPU-60X0的3轴加速度计为每个轴使用单独的检测质量。 加速沿着一条特定轴在相应的检测质量上引起位移,并且电容式传感器检测到该位移位移有差别。 MPU-60X0的架构降低了加速度计的敏感度制造变化以及热漂移。 当设备放置在平坦的表面上时,将进行测量在X和Y轴上为 0g,在Z轴上为+ 1g。 加速度计的比例因子在工厂进行校准并且在名义上与电源电压无关。 每个传感器都有一个专用的sigma-delta ADC来提供数字输出。 数字输出的满量程范围可以调整到±2g,±4g,±8g或±16g。
其实说简单点,在mpu6050中我们用陀螺仪传感器测角度,用加速度传感器测加速度。
MPU-60X0是全球首例9轴运动处理传感器。它集成了3轴MEMS陀螺仪, 3轴MEMS 加速度计,以及一个可扩展的数字运动处理器 DMP(DigitalMotion Processor),可用 I2C 接口连接一个第三方的数字传感器,比如磁力计。扩展之后就可以通过其 I2C 或 SPI 接口 输出一个 9 轴的信号(SPI 接口仅在 MPU-6000 可用)。MPU-60X0 也可以通过其 I2C 接口连接非惯性的数字传感器,比如压力传感器。
数字运动处理器(DMP):
嵌入式数字运动处理器(DMP)位于MPU-60X0内部,可从主机处理器中卸载运动处理算法的运算。 DMP从加速度计,陀螺仪以及其他第三方传感器(如磁力计)获取数据,并处理数据。结果数据可以从DMP的寄存器中读取,或者可以在FIFO中缓冲。 DMP可以访问其中的一个MPU的外部引脚,可用于产生中断。
DMP的目的是卸载主机处理器的时序要求和处理能力。通常,运动处理算法应该以高速运行,通常在200Hz左右,以提供低延迟的精确结果。即使应用程序以更低的速率更新,这也是必需的。例如,一个低功率的用户界面可能会以5Hz的速度更新,但运动处理仍然应该以200Hz运行。 DMP可以作为一种工具使用,以最大限度地降低功耗,简化定时,简化软件架构,并在主机处理器上节省宝贵的MIPS,以便在应用中使用。
2.数据分析
(1)加速度计
下图标明了传感器的参考坐标系( XYZ组成右手
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1425
1425

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









