






项目简介
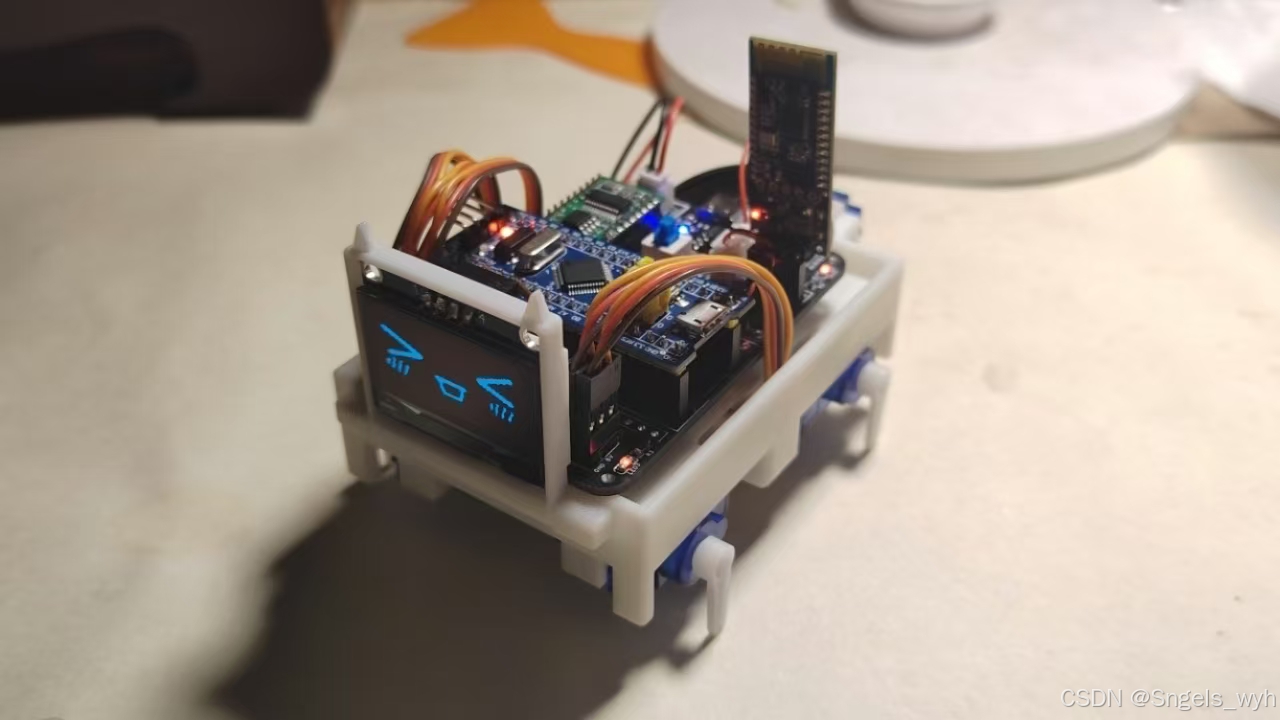
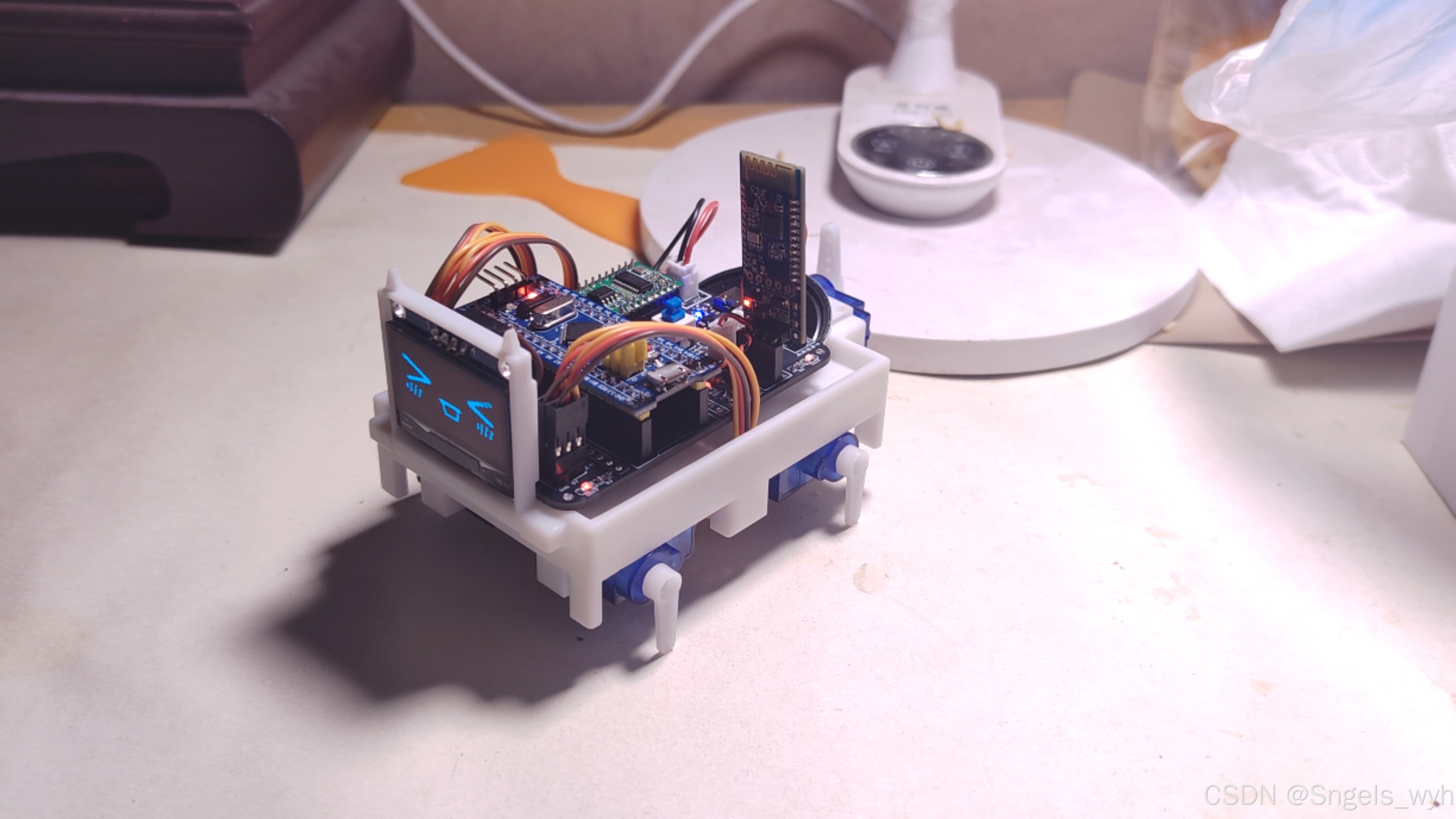
本项目是基于STM32单片机的智能小桌宠,具有简单的与人交互功能,支持语音与蓝牙同时控制。视频教程发布于哔哩哔哩,抖音平台。
STM32智能桌面宠物新电路板总教程(v1.1)
项目资料位置:
物料,代码,模型,PCB文件已在立创开源硬件平台进行了开源,各位可以直接去取。STM32智能桌面宠物 - 立创开源硬件平台,搭配我的哔哩哔哩的教程
哔哩哔哩出了一期详细的开源教程,也可以在我视频下方直接购买整理好的文件资料包,这样更容易上手制作,减少些繁琐的步骤。
项目图片
当前最新:
以往:
项目功能
一些简单的交流互动,立正,前进,后退,左转,右转,摇尾巴,趴下,蹲下,睡觉,向前跳,一般用于放置桌面上。语音可以自定义设置,需要到智能公元网站配置。
项目学习
- 单片机小狗的灵感来自于UP主有出息的男孩,让我明白了舵机也能这样玩。
- STM32单片机是跟着UP主江科大老师学习的
- OLED的使用看的是江科大老师的OLED教程,也可进行自定义设置表情
- 嘉立创PCB画板跟着UP主Expert电子实验室学习的
- SOLIDWORKS软件是跟着阿奇老师学习的
- 语音模块用的是机芯智能的su-03t1,可进行自定义设置唤醒词命令词
原理解析
一、硬件说明
详细请转至我的立创开源硬件平台:STM32智能桌面宠物 - 立创开源硬件平台
本项目使用的是嘉立创专业版绘制电路板,硬件比较简单,采用外部3.7V锂电池供电,通过5V充放电模块输出5V给电路板上的stm32最小开发板供电,因开发板自带稳压芯片可得3.3V给单片机供电。
二、代码说明
由于单片机知识我是跟着江科大老师学习的,所以代码采用的是标准库,也进行了模块封装。
主函数代码
主函数里的Action_Mode是全局变量,值是进串口中断更改的,主循环遍历这个值来切换动作模式
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "BlueTooth.h"
#include "Servo.h"
#include "PetAction.h"
#include "Face_Config.h"
#include "PWM.h"
/***************************************************************************************
* 本程序由博主我Sngels_wyh创建并免费开源共享
* 你可以任意查看、使用和修改,并应用到自己的项目之中
*
* 程序名称: 基于STM32F103C8T6单片机的桌面宠物小项目
* 此程序更新时间: 2025.2.16
*
* 主要在立创开源平台、CSDN网站、哔哩哔哩、抖音分享自己的作品。
* 相关的资料可以去立创开源硬件平台网站上搜索,作品附件放置更新网盘,如有更新可方便快速查看
* 地址:https://oshwhub.com/sngelswyh/stm32-smart-desktop-pet
***************************************************************************************/
uint16_t Time;
uint16_t HuXi;
uint16_t PanDuan=1;
uint16_t Wait=0;
int main(void)
{
Servo_Init();
OLED_Init();//OLED初始化
BlueTooth_Init();//蓝牙初始化
OLED_ShowImage(0,0,128,64,Face_sleep);
OLED_Update();
while(1)
{
if(Action_Mode==0){Action_relaxed_getdowm();WServo_Angle(90);}//放松趴下
else if(Action_Mode==1){Action_sit();}//坐下
else if(Action_Mode==2){Action_upright();}//站立
else if(Action_Mode==3){Action_getdowm();}//趴下
else if(Action_Mode==4){Action_advance();}//前进
else if(Action_Mode==5){Action_back();}//后退
else if(Action_Mode==6){Action_Lrotation();}//左转
else if(Action_Mode==7){Action_Rrotation();}//右转
else if(Action_Mode==8){Action_Swing();}//摇摆
else if(Action_Mode==9){Action_SwingTail();}//摇尾巴
else if(Action_Mode==10){Action_JumpU();}//前跳
else if(Action_Mode==11){Action_JumpD();}//后跳
else if(Action_Mode==12){Action_upright2();}//站立方式2
else if(Action_Mode==13){Action_Hello();}//打招呼
else if(Action_Mode==14){Action_stretch();}//伸懒腰
else if(Action_Mode==15){Action_Lstretch();}//后腿拉伸
}
}定时中断(配置呼吸灯)
因为TIM3的通道1给了尾巴舵机上,所以设置的ARR为20000,PSC=72,
根据计算得72000000/72/20000=50,1/50=0.02s,所以每20ms进一次中断,
因为ARR为20000,所以灯最亮时CCR需为20000,每次进中断,让CCR减100。
void TIM3_IRQHandler(void)
{
if(TIM_GetITStatus(TIM3,TIM_IT_Update)==SET)
{
if(AllLed==1 && BreatheLed==0)//如果灯光开启且不开启呼吸灯,亮度拉满
{
PWM_LED1(20000);
PWM_LED2(20000);
}
else if(AllLed==1 && BreatheLed==1)//如果灯光开启且开启呼吸灯
{
if(PanDuan==1)
{
HuXi+=100;
PWM_LED1(HuXi);
PWM_LED2(HuXi);
if(HuXi==20000)
PanDuan=2;
}
else if(PanDuan==2)
{
HuXi-=100;
PWM_LED1(HuXi);
PWM_LED2(HuXi);
if(HuXi==0)
{
PanDuan=3;
}
}
else if(PanDuan==3)
{
Wait+=1000;
if(Wait==20000)
{
PanDuan=1;
Wait=0;
}
}
}
else if(AllLed==0)
{
PWM_LED1(0);
PWM_LED2(0);
}
TIM_ClearITPendingBit(TIM3,TIM_IT_Update);
}
}
输出比较PWM模式
由于一个计时器只能开启4个输出比较模式,对应四条腿,但我们还需要一个尾巴,所以只能再开启一个定时器了
#include "stm32f10x.h" // Device header
void PWM_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);//开启TIM2时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);//开启TIM3时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//开启GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//开启GPIOB时钟
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;//复用推挽输出模式
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_6;//默认PA0是TIM2通道1的复用,PA1是TIM2通道2的复用所以开启这俩IO口...
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;//复用推挽输出模式
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0|GPIO_Pin_1;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure);
TIM_InternalClockConfig(TIM2);//TIM2切换为内部定时器
TIM_InternalClockConfig(TIM3);//TIM3切换为内部定时器
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1;//不分频
TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up;//向上计数
TIM_TimeBaseInitStructure.TIM_Period=20000-1;
TIM_TimeBaseInitStructure.TIM_Prescaler=72-1;
TIM_TimeBaseInitStructure.TIM_RepetitionCounter=0;
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure);
//TIM3定时中断配置
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel=TIM3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority=0;
NVIC_Init(&NVIC_InitStructure);
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE);
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_OCStructInit(&TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;//输出比较模式采用PWM1
TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse=0;//初始化CCR的值为0
TIM_OC1Init(TIM2,&TIM_OCInitStructure);//TIM2复用通道1开启
TIM_OC2Init(TIM2,&TIM_OCInitStructure);//TIM2复用通道2开启
TIM_OC3Init(TIM2,&TIM_OCInitStructure);//TIM2复用通道3开启
TIM_OC4Init(TIM2,&TIM_OCInitStructure);//TIM2复用通道4开启
TIM_OC1Init(TIM3,&TIM_OCInitStructure);//TIM3复用通道1开启
TIM_OC3Init(TIM3,&TIM_OCInitStructure);//TIM3复用通道3开启
TIM_OC4Init(TIM3,&TIM_OCInitStructure);//TIM3复用通道4开启
TIM_Cmd(TIM2,ENABLE);//使能TIM2
TIM_Cmd(TIM3,ENABLE);//使能TIM3
}
void PWM_SetCompare1(uint16_t Compare)
{
TIM_SetCompare1(TIM2, Compare);//设置CCR1的值
}
void PWM_SetCompare2(uint16_t Compare)
{
TIM_SetCompare2(TIM2, Compare);//设置CCR2的值
}
void PWM_SetCompare3(uint16_t Compare)
{
TIM_SetCompare3(TIM2, Compare);//设置CCR3的值
}
void PWM_SetCompare4(uint16_t Compare)
{
TIM_SetCompare4(TIM2, Compare);//设置CCR4的值
}
void PWM_WSetCompare(uint16_t Compare)
{
TIM_SetCompare1(TIM3, Compare);//设置尾巴CCR1的值
}
void PWM_LED1(uint16_t Compare)
{
TIM_SetCompare3(TIM3,Compare);
}
void PWM_LED2(uint16_t Compare)
{
TIM_SetCompare4(TIM3,Compare);
}
头文件
#ifndef __PWM_H
#define __PWM_H
void PWM_Init(void);
void PWM_SetCompare1(uint16_t Compare);
void PWM_SetCompare2(uint16_t Compare);
void PWM_SetCompare3(uint16_t Compare);
void PWM_SetCompare4(uint16_t Compare);
void PWM_WSetCompare(uint16_t Compare);
void PWM_LED1(uint16_t Compare);
void PWM_LED2(uint16_t Compare);
#endif舵机设置
为了统一角度,比如设置0度,那么所有舵机执行的方向朝向一致。所以舵机2和舵机4的Angle取补角
#include "stm32f10x.h" // Device header
#include "PWM.h"
void Servo_Init()
{
PWM_Init();
}
void Servo_Angle1(float Angle)//左上
{
PWM_SetCompare1(Angle / 180 * 2000 + 500);
}
void Servo_Angle2(float Angle)//右上
{
PWM_SetCompare2((180-Angle) / 180 * 2000 + 500);
}
void Servo_Angle3(float Angle)//左下
{
PWM_SetCompare3(Angle / 180 * 2000 + 500);
}
void Servo_Angle4(float Angle)//右下
{
PWM_SetCompare4((180-Angle) / 180 * 2000 + 500);
}
void WServo_Angle(float Angle)//尾巴
{
PWM_WSetCompare(Angle / 180 * 2000 + 500);
}
头文件
#ifndef __SERVO_H
#define __SERVO_H
void Servo_Init(void);
void Servo_Angle1(float Angle);
void Servo_Angle2(float Angle);
void Servo_Angle3(float Angle);
void Servo_Angle4(float Angle);
void WServo_Angle(float Angle);
#endif动作代码
【1】舵机的前进、后退、左转、右转比较难,这里我是参考了bilibili上的up主石桥北关于舵机步态的视频。
【2】代码里每一个动作中都带有一些延迟,目的是为了动作连贯性与供电稳定性而考虑到的,毕竟我们采用的是1000ma的锂电池接5V充放电模块,不只是给舵机供电,还要给蓝牙和语音模块供电。所以动作中只有两个舵机会同时供电(摇摆动作除外),这样能保障蓝牙与语音不会因瞬时电流减少而中断连接。
【3】25年2月16日进行了代码修改,将所有的连续动作添加了次数变量,将连续动作改为了半连续动作,目的就是减轻因舵机持续运动而导致语音模块供电不稳从而无法接收命令这个情况,蓝牙控制和原先一样,按住就是连续运动。
#include "stm32f10x.h" // Device header
#include "Servo.h"
#include "Delay.h"
#include "BlueTooth.h"
/*舵机位置
1 2
3 4
*/
//舵机充当腿,括号里的值为0时表示的是腿向前进的方向甩,90度是站立
#define Chongfunumber 2 //动作重复次数、前进后退左转右转
#define SwingRepeatnumber 3 //摇摆重复次数
#define HelloRepeatnumber 4 //打招呼重复次数
uint16_t PAnumbers=Chongfunumber;//动作重复次数
uint16_t TiaoTurn=0;
uint16_t TiaoTurn2=0;
void Action_relaxed_getdowm(void)
{
Servo_Angle1(20);
Servo_Angle2(20);
Delay_ms(80);
Servo_Angle3(160);
Servo_Angle4(160);
}
void Action_upright(void)//站立
{
Servo_Angle1(90);
Servo_Angle2(90);
Delay_ms(80);
Servo_Angle3(90);
Servo_Angle4(90);
if(WeiBa==1)
{
Action_Mode=9;
}
}
void Action_upright2(void)//站立
{
Servo_Angle3(90);
Servo_Angle4(90);
Delay_ms(80);
Servo_Angle1(90);
Servo_Angle2(90);
if(WeiBa==1)
{
Action_Mode=9;
}
}
void Action_getdowm(void)//趴下
{
Servo_Angle1(20);
Servo_Angle2(20);
Delay_ms(80);
Servo_Angle3(20);
Servo_Angle4(20);
if(WeiBa==1)
{
Action_Mode=9;
}
}
void Action_sit(void)//坐下
{
Servo_Angle1(90);
Servo_Angle2(90);
Delay_ms(80);
Servo_Angle3(20);
Servo_Angle4(20);
if(WeiBa==1)
{
Action_Mode=9;
}
}
void Action_advance(void)//前进
{
while(Action_Mode==4)
{
PAnumbers=Chongfunumber;
while((PAnumbers || Sustainedmove)&& Action_Mode==4)
{
Servo_Angle2(45);
Servo_Angle3(45);
Delay_ms(SpeedDelay);
if(Action_Mode!=4)break;
Servo_Angle1(135);
Servo_Angle4(135);
Delay_ms(SpeedDelay);
if(Action_Mode!=4)break;
Servo_Angle2(90);
Servo_Angle3(90);
Delay_ms(SpeedDelay);
if(Action_Mode!=4)break;
Servo_Angle1(90);
Servo_Angle4(90);
Delay_ms(SpeedDelay);
if(Action_Mode!=4)break;
Servo_Angle1(45);
Servo_Angle4(45);
Delay_ms(SpeedDelay);
if(Action_Mode!=4)break;
Servo_Angle2(135);
Servo_Angle3(135);
Delay_ms(SpeedDelay);
if(Action_Mode!=4)break;
Servo_Angle1(90);
Servo_Angle4(90);
Delay_ms(SpeedDelay);
if(Action_Mode!=4)break;
Servo_Angle2(90);
Servo_Angle3(90);
Delay_ms(SpeedDelay);
if(Action_Mode!=4)break;
PAnumbers--;
}
if(Sustainedmove!=1 && Action_Mode==4)
Action_Mode=2;
}
}
void Action_back(void)//后退
{
while(Action_Mode==5)
{
PAnumbers=Chongfunumber;
while((PAnumbers || Sustainedmove) && Action_Mode==5 )
{
Servo_Angle2(135);
Servo_Angle3(135);
Delay_ms(SpeedDelay);
if(Action_Mode!=5)break;
Servo_Angle1(45);
Servo_Angle4(45);
Delay_ms(SpeedDelay);
if(Action_Mode!=5)break;
Servo_Angle2(90);
Servo_Angle3(90);
Delay_ms(SpeedDelay);
if(Action_Mode!=5)break;
Servo_Angle1(90);
Servo_Angle4(90);
Delay_ms(SpeedDelay);
if(Action_Mode!=5)break;
Servo_Angle1(135);
Servo_Angle4(135);
Delay_ms(SpeedDelay);
if(Action_Mode!=5)break;
Servo_Angle2(45);
Servo_Angle3(45);
Delay_ms(SpeedDelay);
if(Action_Mode!=5)break;
Servo_Angle1(90);
Servo_Angle4(90);
Delay_ms(SpeedDelay);
if(Action_Mode!=5)break;
Servo_Angle2(90);
Servo_Angle3(90);
Delay_ms(SpeedDelay);
if(Action_Mode!=5)break;
PAnumbers--;
}
if(Sustainedmove!=1 && Action_Mode==5)
Action_Mode=2;
}
}
void Action_Lrotation(void)//向左旋转
{
while(Action_Mode==6)
{
PAnumbers=Chongfunumber;
PAnumbers=PAnumbers+Chongfunumber;
while((PAnumbers || Sustainedmove) && Action_Mode==6)
{
Servo_Angle2(45);
Servo_Angle3(135);
Delay_ms(SpeedDelay);
if(Action_Mode!=6)break;
Servo_Angle1(45);
Servo_Angle4(135);
Delay_ms(SpeedDelay);
if(Action_Mode!=6)break;
Servo_Angle2(90);
Servo_Angle3(90);
Delay_ms(SpeedDelay);
if(Action_Mode!=6)break;
Servo_Angle1(90);
Servo_Angle4(90);
Delay_ms(SpeedDelay);
if(Action_Mode!=6)break;
PAnumbers--;
}
if(Sustainedmove!=1 && Action_Mode==6)
Action_Mode=2;
}
}
void Action_Rrotation(void)//向右旋转
{
while(Action_Mode==7)
{
PAnumbers=Chongfunumber;
PAnumbers=PAnumbers+Chongfunumber;
while((PAnumbers || Sustainedmove) && Action_Mode==7)
{
Servo_Angle1(45);
Servo_Angle4(135);
Delay_ms(SpeedDelay);
if(Action_Mode!=7)break;
Servo_Angle2(45);
Servo_Angle3(135);
Delay_ms(SpeedDelay);
if(Action_Mode!=7)break;
Servo_Angle1(90);
Servo_Angle4(90);
Delay_ms(SpeedDelay);
if(Action_Mode!=7)break;
Servo_Angle2(90);
Servo_Angle3(90);
Delay_ms(SpeedDelay);
if(Action_Mode!=7)break;
PAnumbers--;
}
if(Sustainedmove!=1 && Action_Mode==7)
Action_Mode=2;
}
}
void Action_Swing(void)//摇摆
{
uint16_t SwingNumber=SwingRepeatnumber;
while(SwingNumber && Action_Mode==8)
{
for(uint8_t i=30;i<150;i++)
{
Servo_Angle1(i);
Servo_Angle2(i);
Servo_Angle3(i);
Servo_Angle4(i);
Delay_ms(SwingDelay);
if(Action_Mode!=8)break;
}
if(Action_Mode!=8)break;
for(uint8_t i=150;i>30;i--)
{
Servo_Angle1(i);
Servo_Angle2(i);
Servo_Angle3(i);
Servo_Angle4(i);
Delay_ms(SwingDelay);
if(Action_Mode!=8)break;
}
if(Action_Mode!=8)break;
SwingNumber--;
}
for(uint8_t i=30;i<90;i++)
{
Servo_Angle1(i);
Servo_Angle2(i);
Servo_Angle3(i);
Servo_Angle4(i);
Delay_ms(SwingDelay);
if(Action_Mode!=8)break;
}
if(Action_Mode==8)
Action_Mode=2;
}
void Action_SwingTail(void)//摇尾巴
{
uint16_t SwingTailNumber=3;
Delay_ms(60);
while(SwingTailNumber && Action_Mode==9)
{
for(uint8_t i=30;i<150;i++)
{
WServo_Angle(i);
Delay_ms(SwingDelay);
if(Action_Mode!=9)break;
}
if(Action_Mode!=9)break;
for(uint8_t i=150;i>30;i--)
{
WServo_Angle(i);
Delay_ms(SwingDelay);
if(Action_Mode!=9)break;
}
if(Action_Mode!=9)break;
SwingTailNumber--;
}
Delay_ms(60);
}
void Action_JumpU(void)//向前跳
{
if(TiaoTurn==0)
{
Servo_Angle1(140);
Servo_Angle4(35);
Delay_ms(SpeedDelay);
Servo_Angle2(140);
Servo_Angle3(35);
Delay_ms(SpeedDelay+80);
Action_Mode=2;
TiaoTurn=1;
}
else
{
Servo_Angle2(140);
Servo_Angle3(35);
Delay_ms(SpeedDelay);
Servo_Angle1(140);
Servo_Angle4(35);
Delay_ms(SpeedDelay+80);
Action_Mode=2;
TiaoTurn=0;
}
}
void Action_JumpD(void)//向后跳
{
if(TiaoTurn2==0){
Servo_Angle4(35);
Servo_Angle1(140);
Delay_ms(SpeedDelay);
Servo_Angle3(35);
Servo_Angle2(140);
Delay_ms(SpeedDelay);
Action_Mode=12;
TiaoTurn2=1;
}
else
{
Servo_Angle3(35);
Servo_Angle2(140);
Delay_ms(SpeedDelay);
Servo_Angle4(35);
Servo_Angle1(140);
Delay_ms(SpeedDelay);
Action_Mode=12;
TiaoTurn2=0;
}
}
void Action_Hello(void)
{
uint16_t HelloNumber=HelloRepeatnumber;
Servo_Angle3(20);
Servo_Angle4(45);
Delay_ms(80);
Servo_Angle1(90);
while(HelloNumber && Action_Mode==13)
{
if(Action_Mode!=13)break;
for(int i=0;i<=45;i++)
{
if(Action_Mode!=13)break;
Servo_Angle2(i);
Delay_ms(SwingDelay);
}
for(int i=45;i>0;i--)
{
if(Action_Mode!=13)break;
Servo_Angle2(i);
Delay_ms(SwingDelay);
}
if(Action_Mode!=13)break;
HelloNumber--;
}
if(Action_Mode==13)
Action_Mode=2;
}
void Action_stretch(void)//伸懒腰
{
Servo_Angle3(90);
Servo_Angle4(90);
Delay_ms(80);
for(int i=90;i>10;i--)
{
Servo_Angle1(i);
Servo_Angle2(i);
if(Action_Mode!=14)break;
Delay_ms(15);
}
for(int i=10;i<90;i++)
{
Servo_Angle1(i);
Servo_Angle2(i);
if(Action_Mode!=14)break;
Delay_ms(15);
}
for(int i=90;i<170;i++)
{
Servo_Angle3(i);
Servo_Angle4(i);
if(Action_Mode!=14)break;
Delay_ms(15);
}
for(int i=170;i>90;i--)
{
Servo_Angle3(i);
Servo_Angle4(i);
if(Action_Mode!=14)break;
Delay_ms(15);
}
if(Action_Mode==14)
Action_Mode=15;
}
void Action_Lstretch(void)//后腿拉伸
{
int breakvalue=1;
int temp=3;
while(breakvalue)
{
Servo_Angle1(90);
Servo_Angle2(20);
Delay_ms(60);
Servo_Angle4(110);
for(int i=90;i<180;i++)
{
if(Action_Mode!=15)break;
Servo_Angle3(i);
Delay_ms(6);
}
while(temp && Action_Mode==15)
{
for(int i=180;i>150;i--)
{
if(Action_Mode!=15)break;
Servo_Angle3(i);
Delay_ms(15);
}
temp--;
}
if(Action_Mode!=15)break;
Delay_ms(100);
Servo_Angle1(90);
Servo_Angle2(90);
if(Action_Mode!=15)break;
Delay_ms(80);
Servo_Angle3(90);
Servo_Angle4(90);
Delay_ms(100);
if(Action_Mode!=15)break;
temp=3;
Servo_Angle2(90);
Servo_Angle1(20);
if(Action_Mode!=15)break;
Delay_ms(60);
Servo_Angle3(110);
for(int i=90;i<180;i++)
{
if(Action_Mode!=15)break;
Servo_Angle4(i);
Delay_ms(6);
}
while(temp && Action_Mode==15)
{
for(int i=180;i>150;i--)
{
if(Action_Mode!=15)break;
Servo_Angle4(i);
Delay_ms(15);
}
temp--;
}
if(Action_Mode==15)
Action_Mode=2;
breakvalue=0;
}
}
头文件
#ifndef __PET_ACTION_
#define __PET_ACTION
void Action_relaxed_getdowm(void);
void Action_upright(void);
void Action_getdowm(void);
void Action_sit(void);
void Action_Swing(void);
void Action_advance(void);
void Action_back(void);
void Action_Lrotation(void);
void Action_Rrotation(void);
void Action_SwingTail(void);//摇尾巴
void Action_JumpD(void);//向后跳
void Action_JumpU(void);//向前跳
void Action_upright2(void);//动作辅助
void Action_Hello(void);//打招呼
void Action_stretch(void);//伸懒腰
void Action_Lstretch(void);//后腿拉伸
#endif蓝牙与语音连接配置
USART1配置语音模块的串口,因为我用的语音模块是机芯智能商家的su-03t1模块,只能通过USART1串口通道
USART3配置蓝牙模块的串口(USART2被定时器2占用了)
中断函数中,是改变Action_Mode的值与Face_Mode的值,并进入Face_Config()函数来更改表情。主循环遍历根据Action_Mode的值来改变动作。
#include "stm32f10x.h" // Device header
#include "PWM.h"
#include "PetAction.h"
#include "Face_Config.h"
uint16_t AllLed=1; //开启灯光
uint16_t BreatheLed=0;//开启呼吸灯
uint16_t Sustainedmove=0;//持续运动
uint16_t Action_Mode=0;
uint16_t SpeedDelay=200;
uint16_t SwingDelay=6;
uint16_t Face_Mode=0;
uint8_t WeiBa=0;
void BlueTooth_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//开启GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//开启串口时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//开启GPIOB时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3,ENABLE);//开启串口时钟
//语音
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;//复用推挽输出模式
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_9;//默认PA9是USART1_TX的复用
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;//复用上拉输入模式
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_10;//默认PA9是USART1_RX的复用
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
//蓝牙
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;//复用推挽输出模式
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_10;//默认PB10是USART3_TX的复用
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;//复用上拉输入模式
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_11;//默认PB11是USART3_RX的复用
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStructure);
USART_InitTypeDef UASRT_InitStructure;//USART初始化
UASRT_InitStructure.USART_BaudRate=9600;//波特率9600
UASRT_InitStructure.USART_HardwareFlowControl=USART_HardwareFlowControl_None;//不需要硬件流控制
UASRT_InitStructure.USART_Mode=USART_Mode_Rx|USART_Mode_Tx;//接受与发送均打开
UASRT_InitStructure.USART_Parity=USART_Parity_No;//不需要奇偶校验
UASRT_InitStructure.USART_StopBits=USART_StopBits_1;//停止位为1
UASRT_InitStructure.USART_WordLength=USART_WordLength_8b;//字长8位
USART_Init(USART1,&UASRT_InitStructure);
USART_Init(USART3,&UASRT_InitStructure);
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);//语音接收中断配置,也就是如果接送到消息就直接中断
USART_ITConfig(USART3,USART_IT_RXNE,ENABLE);//蓝牙接收中断配置,也就是如果接送到消息就直接中断
//中断
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//分组2
//语音中断配置
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel=USART1_IRQn;//特定的通道
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;//通道使能
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1;//抢占式优先级为1
NVIC_InitStructure.NVIC_IRQChannelSubPriority=1;//响应优先级为1
NVIC_Init(&NVIC_InitStructure);
//蓝牙中断配置
NVIC_InitStructure.NVIC_IRQChannel=USART3_IRQn;//特定的通道
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;//通道使能
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=2;//抢占式优先级为2
NVIC_InitStructure.NVIC_IRQChannelSubPriority=1;//响应优先级为1
NVIC_Init(&NVIC_InitStructure);
USART_Cmd(USART1,ENABLE);//USART1使能打开
USART_Cmd(USART3,ENABLE);//USART3使能打开
}
void USART1_IRQHandler(void)
{
if(USART_GetITStatus(USART1,USART_IT_RXNE)==SET)//如果接受到
{
Sustainedmove=0;//持续运动关闭
if(USART_ReceiveData(USART1)==0x29)//放松的趴下
{
Face_Mode=0;
Face_Config();
Action_Mode=0;
}
else if(USART_ReceiveData(USART1)==0x30)//蹲下
{
Face_Mode=1;
Face_Config();
Action_Mode=1;
}
else if(USART_ReceiveData(USART1)==0x31)//直立
{
Face_Mode=5;
Face_Config();
Action_Mode=2;
}
else if(USART_ReceiveData(USART1)==0x32)//趴下
{
Face_Mode=1;
Face_Config();
Action_Mode=3;
}
else if(USART_ReceiveData(USART1)==0x33)//前进
{
Face_Mode=2;
Face_Config();
Action_Mode=4;
}
else if(USART_ReceiveData(USART1)==0x34)//后退
{
Face_Mode=2;
Face_Config();
Action_Mode=5;
}
else if(USART_ReceiveData(USART1)==0x35)//左转
{
Face_Mode=2;
Face_Config();
Action_Mode=6;
}
else if(USART_ReceiveData(USART1)==0x36)//右转
{
Face_Mode=2;
Face_Config();
Action_Mode=7;
}
else if(USART_ReceiveData(USART1)==0x37)//摇摆
{
Face_Mode=4;
Face_Config();
Action_Mode=8;
}
else if(USART_ReceiveData(USART1)==0x38)//减少移动延迟,增加移动速度
{
if(SpeedDelay==120){Face_Mode=3;Face_Config();}
if(SpeedDelay>100)
SpeedDelay-=20;
else
{
Face_Mode=2;
Face_Config();
SpeedDelay=200;
}
}
else if(USART_ReceiveData(USART1)==0x39)//减少摇摆延迟,增加摇摆速度
{
if(SwingDelay==4){Face_Mode=3;Face_Config();}
if(SwingDelay>3)
SwingDelay--;
else
{
Face_Mode=4;
Face_Config();
SwingDelay=9;
}
}
else if(USART_ReceiveData(USART1)==0x40)//摇尾巴
{
(WeiBa==0)?(WeiBa=1):(WeiBa=0);
Face_Mode=1;
Face_Config();
Action_Mode=9;
}
else if(USART_ReceiveData(USART1)==0x41)//向前跳
{
Face_Mode=2;
Face_Config();
Action_Mode=10;
}
else if(USART_ReceiveData(USART1)==0x42)//向后跳
{
Face_Mode=2;
Face_Config();
Action_Mode=11;
}
else if(USART_ReceiveData(USART1)==0x43)//打招呼
{
Face_Mode=6;
Face_Config();
Action_Mode=13;
}
else if(USART_ReceiveData(USART1)==0x44)//开启灯光
{
AllLed=1;
}
else if(USART_ReceiveData(USART1)==0x45)//关闭灯光
{
AllLed=0;
}
else if(USART_ReceiveData(USART1)==0x46)//开启呼吸灯
{
BreatheLed=1;
}
else if(USART_ReceiveData(USART1)==0x47)//关闭呼吸灯
{
BreatheLed=0;
}
else if(USART_ReceiveData(USART1)==0x48)//伸懒腰
{
Face_Mode=6;
Face_Config();
Action_Mode=14;
}
else if(USART_ReceiveData(USART1)==0x49)//伸懒腰
{
Face_Mode=6;
Face_Config();
Action_Mode=15;
}
USART_ClearITPendingBit(USART1,USART_IT_RXNE);
}
}
void USART3_IRQHandler(void)
{
if(USART_GetITStatus(USART3,USART_IT_RXNE)==SET)//如果接受到
{
Sustainedmove=1;//持续运动开启
if(USART_ReceiveData(USART3)==0x29)//放松的趴下
{
Face_Mode=0;
Face_Config();
Action_Mode=0;
}
else if(USART_ReceiveData(USART3)==0x30)//蹲下
{
Face_Mode=1;
Face_Config();
Action_Mode=1;
}
else if(USART_ReceiveData(USART3)==0x31)//直立
{
Face_Mode=5;
Face_Config();
Action_Mode=2;
}
else if(USART_ReceiveData(USART3)==0x32)//趴下
{
Face_Mode=1;
Face_Config();
Action_Mode=3;
}
else if(USART_ReceiveData(USART3)==0x33)//前进
{
Face_Mode=2;
Face_Config();
Action_Mode=4;
}
else if(USART_ReceiveData(USART3)==0x34)//后退
{
Face_Mode=2;
Face_Config();
Action_Mode=5;
}
else if(USART_ReceiveData(USART3)==0x35)//左转
{
Face_Mode=2;
Face_Config();
Action_Mode=6;
}
else if(USART_ReceiveData(USART3)==0x36)//右转
{
Face_Mode=2;
Face_Config();
Action_Mode=7;
}
else if(USART_ReceiveData(USART3)==0x37)//摇摆
{
Face_Mode=4;
Face_Config();
Action_Mode=8;
}
else if(USART_ReceiveData(USART3)==0x38)//减少移动延迟,增加移动速度
{
if(SpeedDelay==120){Face_Mode=3;Face_Config();}
if(SpeedDelay>100)
SpeedDelay-=20;
else
{
Face_Mode=2;
Face_Config();
SpeedDelay=200;
}
}
else if(USART_ReceiveData(USART3)==0x39)//减少摇摆延迟,增加摇摆速度
{
if(SwingDelay==4){Face_Mode=3;Face_Config();}
if(SwingDelay>3)
SwingDelay--;
else
{
Face_Mode=4;
Face_Config();
SwingDelay=9;
}
}
else if(USART_ReceiveData(USART3)==0x40)//摇尾巴
{
(WeiBa==0)?(WeiBa=1):(WeiBa=0);
Face_Mode=1;
Face_Config();
Action_Mode=9;
}
else if(USART_ReceiveData(USART3)==0x41)//向前跳
{
Face_Mode=2;
Face_Config();
Action_Mode=10;
}
else if(USART_ReceiveData(USART3)==0x42)//向后跳
{
Face_Mode=2;
Face_Config();
Action_Mode=11;
}
else if(USART_ReceiveData(USART3)==0x43)//打招呼
{
Face_Mode=6;
Face_Config();
Action_Mode=13;
}
else if(USART_ReceiveData(USART3)==0x44)//开启灯光
{
AllLed=1;
}
else if(USART_ReceiveData(USART3)==0x45)//关闭灯光
{
AllLed=0;
}
else if(USART_ReceiveData(USART3)==0x46)//开启呼吸灯
{
BreatheLed=1;
}
else if(USART_ReceiveData(USART3)==0x47)//关闭呼吸灯
{
BreatheLed=0;
}
else if(USART_ReceiveData(USART3)==0x48)//伸懒腰
{
Face_Mode=6;
Face_Config();
Action_Mode=14;
}
else if(USART_ReceiveData(USART3)==0x49)//拉伸腿
{
Face_Mode=6;
Face_Config();
Action_Mode=15;
}
USART_ClearITPendingBit(USART3,USART_IT_RXNE);
}
}头文件
#ifndef __BLUE_TOOTH_H
#define __BLUE_TOOTH_H
extern uint16_t Action_Mode;
extern uint16_t Face_Mode;
extern uint16_t SpeedDelay;
extern uint16_t SwingDelay;
extern uint8_t WeiBa;
extern uint16_t AllLed; //开启灯光
extern uint16_t BreatheLed;//开启呼吸灯
extern uint16_t Sustainedmove;
void BlueTooth_Init(void);
#endif表情代码函数
OLED模块代码是用的江协老师的,OLED显示图片教程也是跟着这个老师学的,表情的图片是从网上找的。
#include "stm32f10x.h"
#include "OLED.h"
#include "BlueTooth.h"
//实现表情变化,调节是进中断后
void Face_Config(void)
{
if(Face_Mode==0)
{
OLED_Clear();
OLED_ShowImage(0,0,128,64,Face_sleep);//睡觉
OLED_Update();
}
else if(Face_Mode==1)
{
OLED_Clear();
OLED_ShowImage(0,0,128,64,Face_stare);//瞪大眼
OLED_Update();
}
else if(Face_Mode==2)
{
OLED_Clear();
OLED_ShowImage(0,0,128,64,Face_happy);//快乐
OLED_Update();
}
else if(Face_Mode==3)
{
OLED_Clear();
OLED_ShowImage(0,0,128,64,Face_mania);//狂热
OLED_Update();
}
else if(Face_Mode==4)
{
OLED_Clear();
OLED_ShowImage(0,0,128,64,Face_very_happy);//非常快乐
OLED_Update();
}
else if(Face_Mode==5)
{
OLED_Clear();
OLED_ShowImage(0,0,128,64,Face_eyes);//眼睛
OLED_Update();
}
else if(Face_Mode==6)
{
OLED_Clear();
OLED_ShowImage(0,0,128,64,Face_hello);//打招呼
OLED_Update();
}
}
头文件
#ifndef __FACE_CONFIG_H
#define __FACE_CONFIG_H
void Face_Config(void);
#endif
三、小狗模型
请去我立创开源硬件平台下方获取STM32智能桌面宠物 - 立创开源硬件平台
结束语
本开源项目整体并不难,其中涉及到的模块较少,五个舵机,一个OLED显示屏,蓝牙模块,语音模块。
同学们如果对哪个部分有所不懂的话可以在评论区询问,我有时间的话就回复。

















 1069
1069

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









