






目录: ACL原理
NAT地址转换
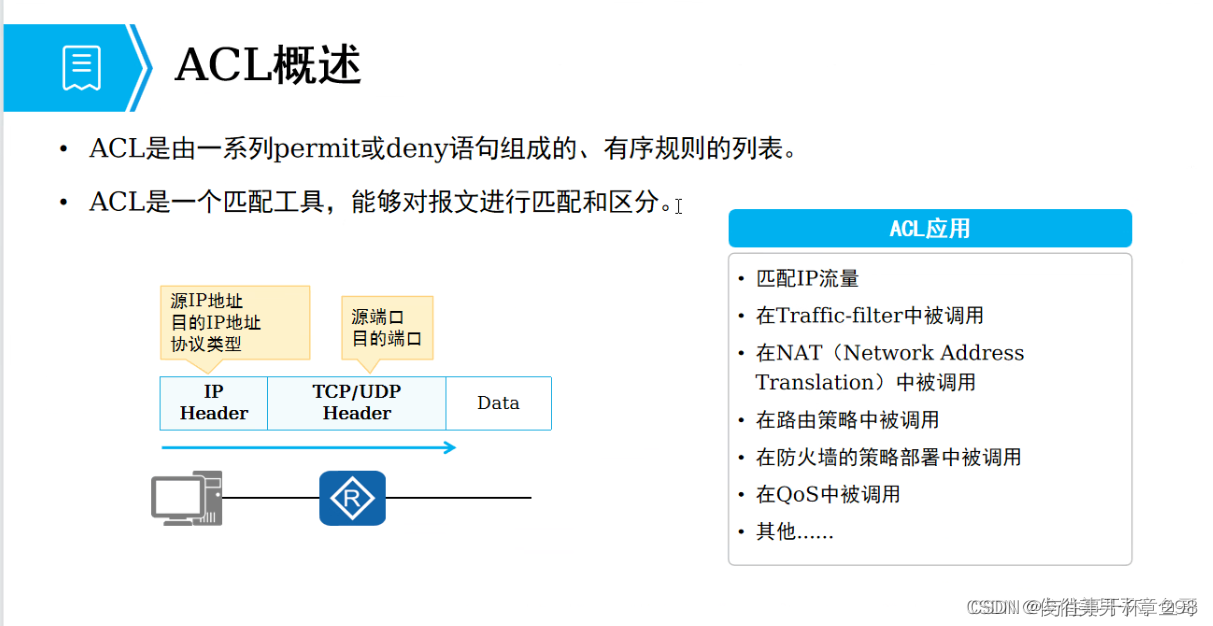
ACL原理:全称aaccess list 访问控制列表
ACL的作用:1、对数据包的访问进行控制。
2、还可以对协议进行控制 icmp tcp
ACL配置在路由器上,数据包从接口经过的时候,接口配置了acl策略,路由器根据策略,检查数据包,然后根据策略做出响应的处理。
acl permit deny 组成的有序的语句,组成一个规则。
acl在接口上如何应用:
在入口:数据包从入口进入路由器,能不能进入路由器
在出口:数据包经过路由器处理之后,数据包能不能出去。
acl的种类:
基本acl:2000-2999 (只能)匹配源ip地址
高级acl:3000-3999 源ip 目的ip 源端口和目的端口,三层和四层协议都可以支持 icmp tcp udp http https
二层acl:4000-4999 ,根据mac地址匹配的,如果设备更换,所有的配置都要重新部署。(不考虑)
acl的使用原则:
基本acl:尽量用在靠近目的地
高级acl:尽量使用在靠近源的地方。
基本acl的语句
rule 5 peimit source 1.1.1.0 0.0.0.255
rule 5 deny source 1.1.1.0 0.0.0.255
acl的应用规则和匹配顺序:
1、一个接口的同一方向只能调用一个acl。
2、一个acl当中可以有多个规则,规则的id从小到大排序,从上到下依次执行。
3、数据包一但被某个策略匹配,那么就不再继续向下匹配。
4、默认是放行所有的(华为设备)。
NAT技术:
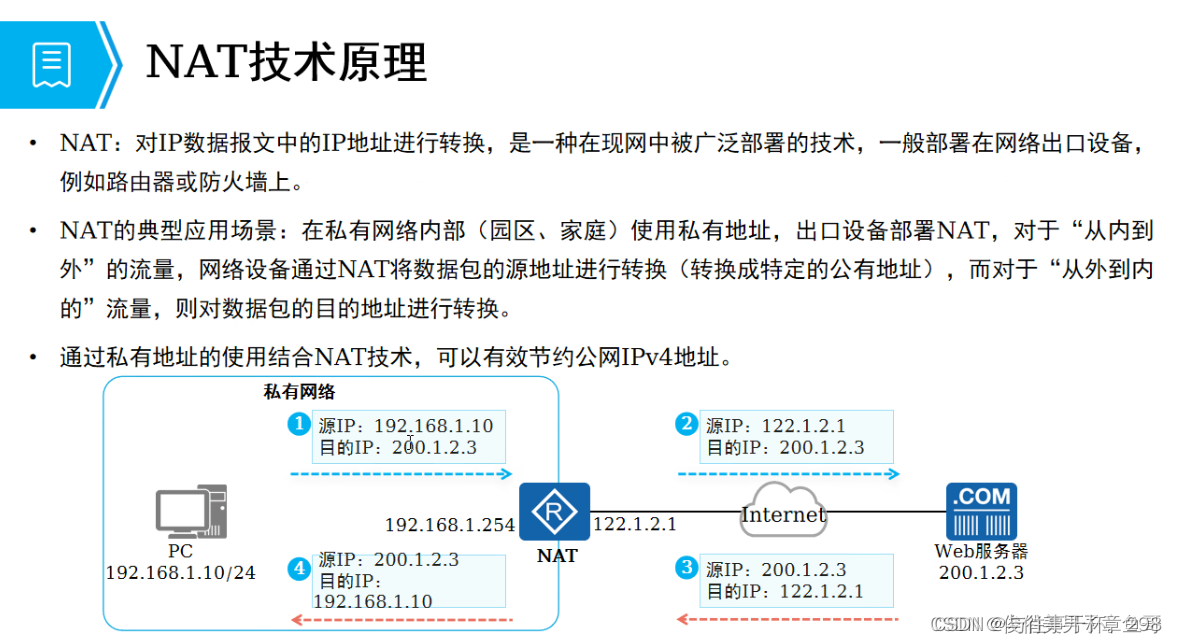
NAT(Network Address Translation,网络地址转换)是一种将私有网络地址转换为公有网络地址的技术,以实现私有网络设备与公有网络的通信。常见的 NAT 类型包括:
1. 静态 NAT(Static NAT):在连接私网和公网的路由器上配置静态 NAT,每个私网地址都有一个固定的公网地址,即私网地址和公网地址是一一对应的。
2. 动态 NAT(Dynamic NAT):为避免地址浪费,动态 NAT 提出了地址池,地址池中所有可用的公共地址。配置动态 NAT 后,企业的边缘路由器根据可用的公网 IP 地址生成一个公网 IP 地址池。企业 PC 上网时,数据包经过路由器。路由器将 PC 的私网 IP 地址替换为空闲的公网 IP 地址,然后访问 Internet。
3. NAPT(Network Address Port Translation,网络地址端口转换):NAPT 是一种将多个私有网络地址映射到一个或多个公有网络地址的技术,同时还会对端口进行转换。它可以实现多个内部设备共享一个公有地址,并通过不同的端口来区分不同的设备。
4. Easy IP:Easy IP 是一种动态 NAT 技术,它直接使用路由器的外网接口地址作为转换后的公网地址。这种方式简单快捷,但可能会导致地址冲突等问题。
这些 NAT 类型在不同的场景中有不同的应用,例如家庭网络、企业网络等。在实际应用中,根据网络需求和设备类型选择合适的 NAT 类型非常重要。
内网到外网,源ip发生变化
外网到内网,目的ip发生变化

















 8706
8706

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









