






图
图(Graph)G由两个集合V和E组成,记为:G=(V,E),其中V是顶点的有穷非空集合(其实就是顶点),E是V 中顶点偶对的有穷集合(就是边)。V(G)和E(G)通常分别表示图G的顶点集合以及边集合,E(G)可以为空集合,但是此时的图只有顶点,没有边。
举个例子:
一个地图: 顶点:城市 边:路 可能只有城市没有路就是E(G)可以为空集合,图只有顶点,没有边。
多个城市 a b c d e
a 到b的方法(a到其他) :a - b a -c - b a - c - d - b
到a也有很多方法 b-a c-b-a 这样就形成了网状结构
1. 图的分类
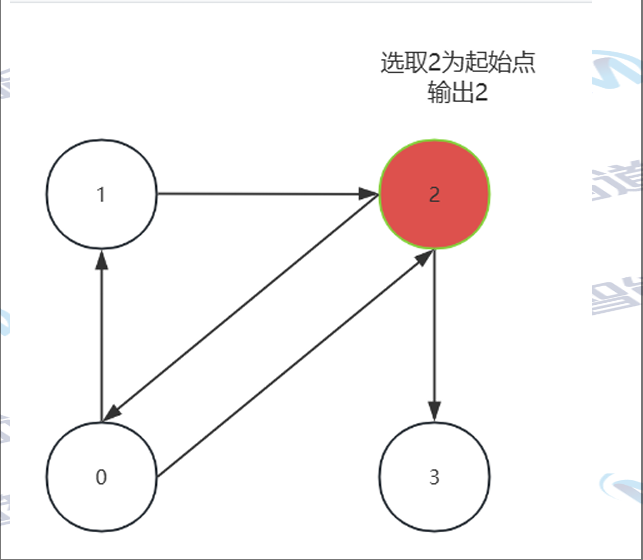
- 有向图:
边是有方向的。类似车道的单行道
这意味着每条边都从一个顶点指向另一个顶点,并且这种指向关系是有序的,有向图的 那个方向的线条称为弧。在有向图中,如果有一条从顶点A到顶点B的边,那么我们说A指向B(A是起点,B是终点),但这并不 意味着B也指向A
示例
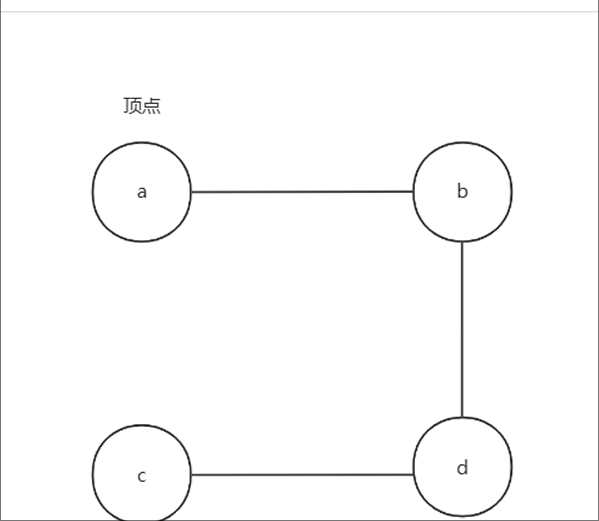
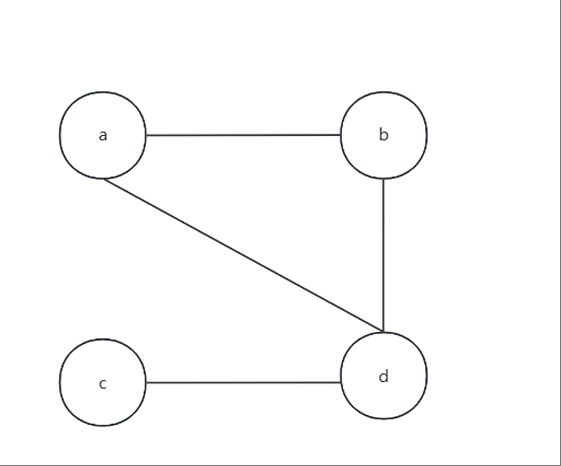
- 无向图:
边没有方向。这意味着每条边都连接两个顶点,但不区分起点和终点。在无向图中,如果两个顶点由一 条边连接,那么它们是相邻的,并且这种相邻关系是对称的。
示例
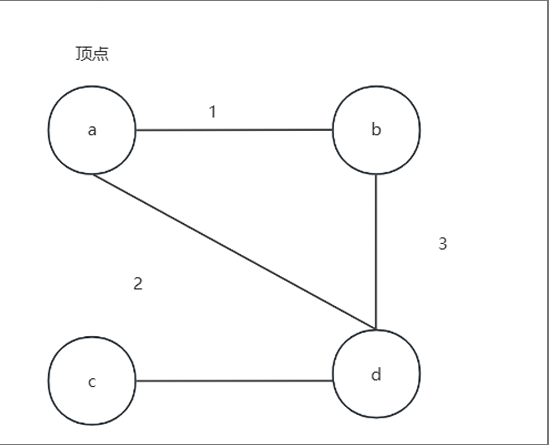
- 网(带权图)
如果在图的每条边(或者弧)都被赋予一个权重(常用于表示节点之间连接的成本或距离),即为网 (带权图)
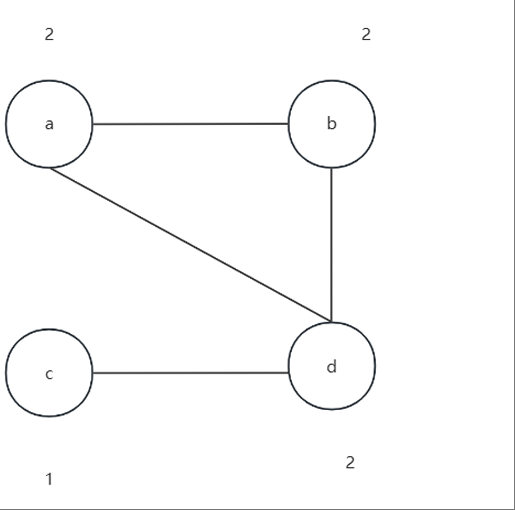
顶点的度
表示与顶点相连的边的数量。
- 无向图
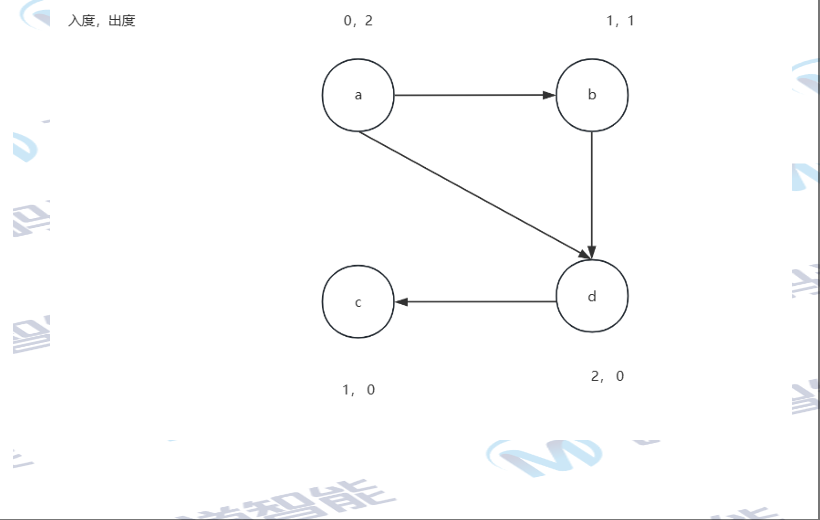
- 有向图
在有向图中,顶点的度分为入度(In-degree)和出度(Out-degree)。
入度:指向该顶点的边的数量。
出度:从该顶点出发的边的数量。
- 路径
图的路径是指由图中的顶点和边所构成的序列,其中顶点之间通过边相连。
两个顶点之间存在路径(到达方式),说明它们是连通。
路径可以是有向的或无向 的,这取决于图的类型。
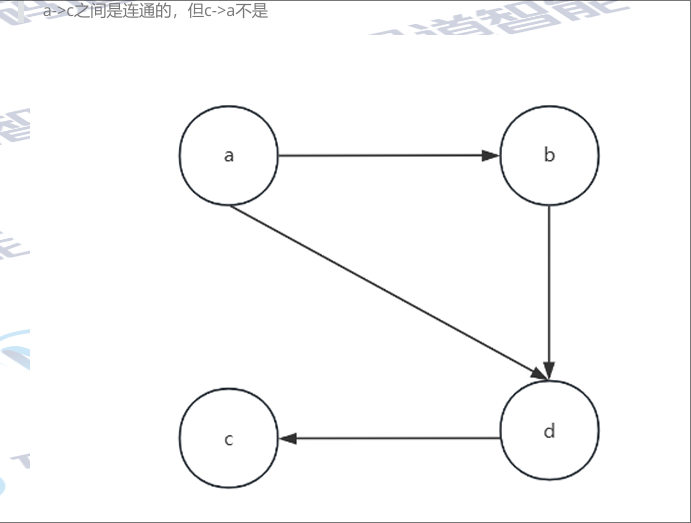
a->c连通 c->a不是因为 这是有向图c到a没有路径到达
若任意两个顶点之间都是连通的话,则图是连通图。
这就是联通图
- 邻接点
邻接点的定义是:如果两个顶点之间存在一条边,那么这两个顶点就互为邻接点
2 图的存储
2.1 邻接矩阵
矩阵(二维数组)
邻接矩阵是表示顶点间相邻关系的矩阵。
对于n个顶点的图,邻接矩阵是一个n×n的二维数组(只存储0 1)。两个顶点存在直接连接到边就是1,否则是0,自己到自己一般也是0
在无向图中,邻接矩阵是对称的(对于对角线对称),而在有向图中则不一定。
-
- 无向图
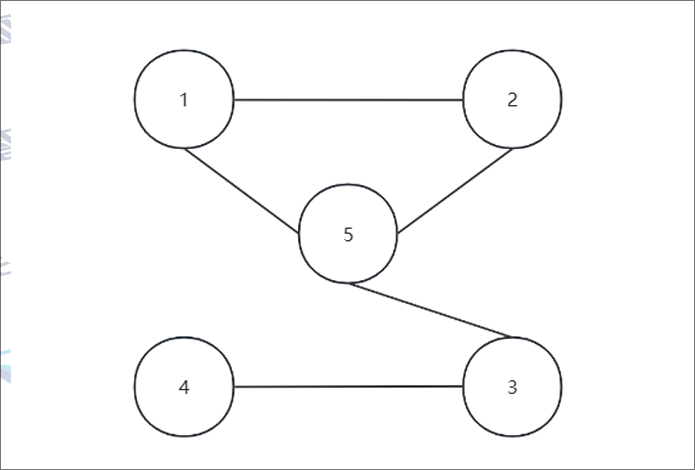
对应的邻接矩阵是
| 1 | 2 | 3 | 4 | 5 | |
|---|---|---|---|---|---|
| 1 | 0 | 1 | 0 | 0 | 1 |
| 2 | 1 | 0 | 0 | 0 | 1 |
| 3 | 0 | 0 | 0 | 1 | 1 |
| 4 | 0 | 0 | 1 | 0 | 0 |
| 5 | 1 | 1 | 1 | 0 | 0 |
-
- 有向图
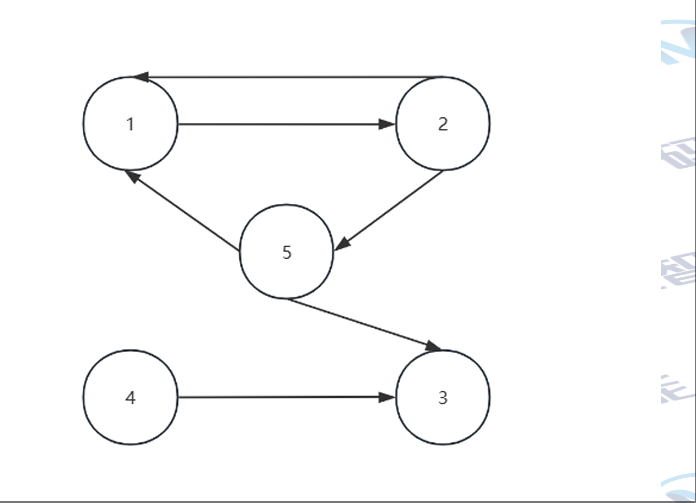
对应的邻接矩阵是
| 1 | 2 | 3 | 4 | 5 | |
|---|---|---|---|---|---|
| 1 | 0 | 1 | 0 | 0 | 0 |
| 2 | 1 | 0 | 0 | 0 | 1 |
| 3 | 0 | 0 | 0 | 0 | 0 |
| 4 | 0 | 0 | 1 | 0 | 0 |
| 5 | 1 | 0 | 1 | 0 | 0 |
代码如下:
- 有向图:
#include <iostream>
using namespace std;
#define MAX_VERTICES 100 // 最大定点数
// 初始化邻接矩阵 int(*p)[MAX_VERTICES]也可以数组指针
void initalizeGraph(int adjMartix[MAX_VERTICES][MAX_VERTICES], int n)
{
for (int i = 0; i < n; i++)
{
for (int j = 0; j < n; j++)
{
adjMartix[i][j] = 0; // 初始化为0,表示没有边
}
}
}
// 添加有向边
void addDirectedEdge(int adjMartix[MAX_VERTICES][MAX_VERTICES], int u, int v) // uv是出度也是入度
{
// 两目标直接连接 有向图
adjMartix[u][v] = 1;
// // 无向图
// adjMartix[v][u] = 1;
}
void printGraph(int adjMartix[MAX_VERTICES][MAX_VERTICES], int n)
{
for (int i = 0; i < n; i++)
{
for (int j = 0; j < n; j++)
{
printf("%d ", adjMartix[i][j]); // 初始化为0,表示没有边
}
printf("\n");
}
}
// 打印图
int main()
{
int adjMartix[MAX_VERTICES][MAX_VERTICES]; // 图
// 节点
int n = 5;
// 初始化图
initalizeGraph(adjMartix, n);
// 添加有向边
addDirectedEdge(adjMartix, 0, 1);
addDirectedEdge(adjMartix, 1, 0);
addDirectedEdge(adjMartix, 1, 4);
addDirectedEdge(adjMartix, 4, 0);
addDirectedEdge(adjMartix, 4, 2);
addDirectedEdge(adjMartix, 3, 2);
// 打印有向图
printGraph(adjMartix, n);
return 0;
}
无向图:
#include <iostream>
using namespace std;
#define MAX_VERTICES 100 // 最大定点数
// 初始化邻接矩阵 int(*p)[MAX_VERTICES]也可以数组指针
void initalizeGraph(int adjMartix[MAX_VERTICES][MAX_VERTICES], int n)
{
for (int i = 0; i < n; i++)
{
for (int j = 0; j < n; j++)
{
adjMartix[i][j] = 0; // 初始化为0,表示没有边
}
}
}
// 添加有向边
void addDirectedEdge(int adjMartix[MAX_VERTICES][MAX_VERTICES], int u, int v) // uv是出度也是入度
{
// 两目标直接连接 有向图
adjMartix[u][v] = 1;
// // 无向图
adjMartix[v][u] = 1;
}
void printGraph(int adjMartix[MAX_VERTICES][MAX_VERTICES], int n)
{
for (int i = 0; i < n; i++)
{
for (int j = 0; j < n; j++)
{
printf("%d ", adjMartix[i][j]); // 初始化为0,表示没有边
}
printf("\n");
}
}
// 打印图
int main()
{
int adjMartix[MAX_VERTICES][MAX_VERTICES]; // 图
// 节点
int n = 5;
// 初始化图
initalizeGraph(adjMartix, n);
// 添加有向边
addDirectedEdge(adjMartix, 0, 1);
addDirectedEdge(adjMartix, 0, 4);
addDirectedEdge(adjMartix, 1, 4);
addDirectedEdge(adjMartix, 5, 3);
addDirectedEdge(adjMartix, 3, 4);
// 打印有向图
printGraph(adjMartix, n);
return 0;
}
优点:
编码简单,容易理解。
便于检查图中任意两个顶点之间是否存在边。
便于计算图中顶点的度。
缺点:
对于稀疏图,邻接矩阵会浪费大量存储空间,因为矩阵中的大部分元素都是0。
在进行图的遍历等操作时,可能需要遍历整个矩阵,效率较低。
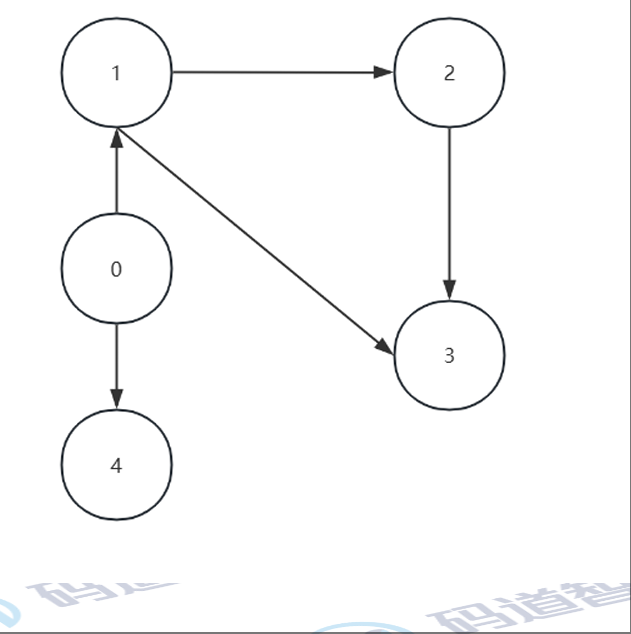
2.2 邻接表
邻接表是图的一种链式存储结构。对于图中的每个顶点,邻接表都存储一个链表,该链表包含与该顶点相邻的所有顶点。
例如下图1包含和他相邻的所有顶点,2和3
可以省略边:连接关系2-3(隐含表示边)(下节讲,下面的代码不省略)
1 - 2 - 3
1 - 3
代码如下
#include <iostream>
using namespace std;
// 定义边
typedef struct EdgeNode
{
int adjvex; // 邻接点 终点
struct EdgeNode *next; // 下一条边 个指针用于连接同一起点的多条边。这样,我们就可以通
// 过遍历next指针来访问从A出发的所有边。
} EdgeNode;
// 定义顶点
typedef struct VertexNode
{
int data; // 起点信息
EdgeNode *FirstNode; // 这个指针用于从顶点出发找到其第一条边 。这样,我们就可以从任意一
// 个顶点开始,通过firstedge找到其所有邻接点。
} VertexNode;
typedef struct Grasp_List
{
VertexNode *newNode; // 顶点
int numVertices; // 顶点数
int numEdges; // 边数
} Grasp_List;
// 初始化函数
void InitGraph(Grasp_List *graph, int n)
{
graph->newNode = new VertexNode[n](); // 分配内存 ()会进行初始化
graph->numVertices = n; 顶点5
graph->numEdges = 0; // 边0
for (int i = 0; i < n; i++)
{
graph->newNode[i].data = i; // 初始化每个顶点的数据
graph->newNode[i].FirstNode = nullptr; // 初始化第一条边为空
}
}
// 向图中添加边 u起始顶点 v邻接点
void AddEdge(Grasp_List *graph, int u, int v)
{
// 创建边
EdgeNode *newEdgeNode = (EdgeNode *)malloc(sizeof(EdgeNode)); // 创建新边节点
// 分配失败
if (!newEdgeNode)
{
perror("分配失败");
return;
}
newEdgeNode->adjvex = v; // 设置邻接点 也就是终点
// 插入 头插法 把边直接
newEdgeNode->next = graph->newNode[u].FirstNode; // 下一条边=原来的第一条边
graph->newNode[u].FirstNode = newEdgeNode; // 更新第一条边
graph->numEdges++; // 边数加1
如果是无向图 还需要再添加一条边
// EdgeNode* newNodeV = (EdgeNode*)malloc(sizeof(EdgeNode)); // 创建新边节点
// if (!newNodeV)
//{
// printf("申请内存失败\n");
// exit(-1);
// }
// newNodeV->adjvex = u; // 设置邻接点
头插法
// newNodeV->next = G->adjList[v].firstedge; // 下一条边 = 原来的第一条边
// G->adjList[v].firstedge = newNodeV; // 更新第一条边
}
// 打印邻接表
void printGraph(Grasp_List *graph)
{
if (graph == nullptr)
{
cout << "我是空图" << endl;
return;
}
printf("Graph with %d vertices and %d edge:\n", graph->numVertices, graph->numEdges);
// 根据定点数遍历
for (int i = 0; i < graph->numVertices; i++)
{
printf("vertices %d: ", graph->newNode[i].data); // 打印顶点
// 找到顶点第一条边
EdgeNode *p = graph->newNode[i].FirstNode; // 保存
while (p)
{
// 邻接点
printf(" %d", p->adjvex);
// 下一条边
p = p->next;
}
printf("\n");
}
}
// 释放图占用的内存
void freeGraph(Grasp_List *graph)
{
if (graph == NULL)
{
return;
}
// 释放边内存
for (int i = 0; i < graph->numVertices; i++)
{
EdgeNode *curerent = graph->newNode[i].FirstNode;
EdgeNode *tmp = nullptr;
while (curerent)
{
tmp = curerent;
curerent = curerent->next;
free(tmp);
tmp = nullptr;
}
curerent = nullptr;
}
// 释放顶点内存
delete[] (graph->newNode);
graph->newNode = nullptr;
// 释放图本身的内存
delete graph;
}
// 主函数实例
int main()
{
Grasp_List *G = new Grasp_List;
// 初始化图
InitGraph(G, 5);
// 添加边
AddEdge(G, 0, 1);
AddEdge(G, 0, 4);
AddEdge(G, 1, 2);
AddEdge(G, 1, 3);
AddEdge(G, 2, 3);
// 打印图
printGraph(G);
// 释放图
freeGraph(G);
return 0;
}
解释一个遍创建的过程
AddEdge(G, 0, 1);
-
这表示在图
G中添加一条从顶点0到顶点1的边。 -
具体步骤如下:
- 创建一个新边节点
newEdgeNode,并为其分配内存。 - 将新边的邻接点设置为
1。 - 使用头插法将新边插入到顶点
0的边链表中,使新边成为顶点0的第一条边。 - 图的边数增加 1
- 创建一个新边节点
-
形成链表的过程
在调用
AddEdge(G, 0, 1)后,顶点0和顶点1通过一条边连接起来。具体来说:- 顶点
0的边链表中新增了一个边节点,其adjvex字段为1。 - 这个边节点通过
next指针连接到原来顶点0的边链表
- 顶点
优点:
节省存储空间,特别是对于稀疏图。
便于添加和删除边。
便于进行图的遍历等操作。
缺点:
不便于检查图中任意两个顶点之间是否存在边(需要遍历两个顶点的邻接表)。
在某些情况下,可能需要额外的空间来存储顶点的信息(如顶点的索引或名称)。

















 69万+
69万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









