






前馈控制是一种控制策略,通过预测和补偿系统的扰动或变化来改善控制性能。与传统的反馈控制不同,前馈控制不依赖于系统的输出信息,而是基于对未来输入或扰动的预测来进行调整。它的主要目的是在系统发生变化之前进行调整,从而减少或消除这些变化对系统输出的影响。
前馈控制的基本原理
-
预测扰动:
- 前馈控制器通过预测即将到来的扰动(如环境变化、系统负载变化等),来计算出相应的控制措施。
-
调整控制输入:
- 根据预测的扰动或系统输入的变化,前馈控制器调整控制输入,以抵消这些变化,从而保持系统输出的稳定性。
-
预补偿:
- 前馈控制器在实际扰动对系统产生影响之前,提前进行补偿。这样可以使系统在扰动发生时已经调整到接近理想状态,减少响应时间和误差。
前馈控制的优缺点
优点:
- 减少响应时间:由于前馈控制器提前进行调整,可以在扰动发生时立即作出反应,从而减少系统的响应时间。
- 提高精度:通过提前补偿扰动,系统可以更准确地保持在目标状态。
缺点:
- 模型依赖性:前馈控制通常需要对系统有准确的模型,以预测扰动的影响。模型不准确可能导致前馈控制效果不佳。
- 对未知扰动无效:如果扰动不可预测或系统模型不完全,前馈控制可能无法有效工作。
- 无法修正偏差:前馈控制不处理已经发生的误差,需要与反馈控制结合使用,以修正系统偏差。
例子
- 温度控制:在工业过程中,前馈控制可以预测外部环境的温度变化(如季节变化)并调整加热或冷却系统的设置,以保持产品温度稳定。
- 化学反应:在化学反应过程中,前馈控制可以预测原料流量的变化并调整反应条件,以确保反应产物的质量。
前馈控制的实现
在实际应用中,前馈控制通常与反馈控制结合使用。前馈控制处理系统的已知或可预测的扰动,而反馈控制则处理系统实际输出的误差。这样可以结合前馈的预补偿能力和反馈的误差修正能力,以实现更优的控制效果。
% 参数定义
K = 8; % 系统增益
T = 10; % 时间常数 (秒)
setpoint = 50; % 目标温度 (摄氏度)
initial_temp = 20; % 初始温度 (摄氏度)
disturbance = 5; % 外部干扰 (摄氏度)
% 时间设置
dt = 1; % 时间步长 (秒)
t_end = 120; % 仿真结束时间 (秒)
time = 0:dt:t_end; % 时间向量
% 初始化
temperature = zeros(size(time)); % 温度向量
control_signal = zeros(size(time)); % 控制信号向量
% 初始条件
temperature(1) = initial_temp;
% 前馈控制
for k = 2:length(time)
% 计算前馈控制信号
% 这里假设前馈控制信号是根据目标温度和外部干扰计算的
control_signal(k) = K * (setpoint - temperature(k-1) + disturbance);
% 更新温度
% 简单的一阶线性系统模型
temperature(k) = temperature(k-1) + dt * (control_signal(k-1) - temperature(k-1))/T;
end
% 绘图
figure;
plot(time, temperature, 'b', 'LineWidth', 2);
hold on;
plot(time, setpoint*ones(size(time)), 'r--', 'LineWidth', 2);
xlabel('时间 (秒)');
ylabel('温度 (摄氏度)');
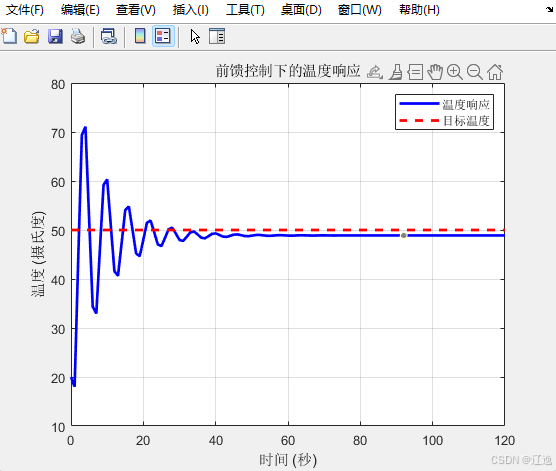
title('前馈控制下的温度响应');
legend('温度响应', '目标温度');
grid on;温度为20℃时:
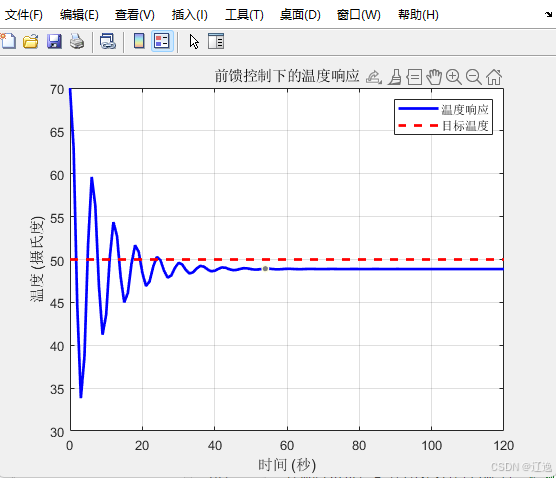
温度为70℃时:

















 994
994

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









