






2.1 引脚连接方式
查询正点原子官方发布的《ATK-MS601M模块使用说明_V1.2》手册可知,IMU601与STM32F103ZET6的连接方式使用到的引脚如图示有VCC、GND、TX、RX四个,TX和RX分别为UART数据输出以及UART数据输入引脚。

图 2‑1 引脚连接图
2.2 解决上位机无法同步数据
2.2.1 异常问题的出现
接线完毕后,烧录正点原子官方给出的代码到STM32上,STM32最小系统板正常闪光,转动陀螺仪,发现上位机无法同步参数的改变,一直显示为最初0状态,如图所示:
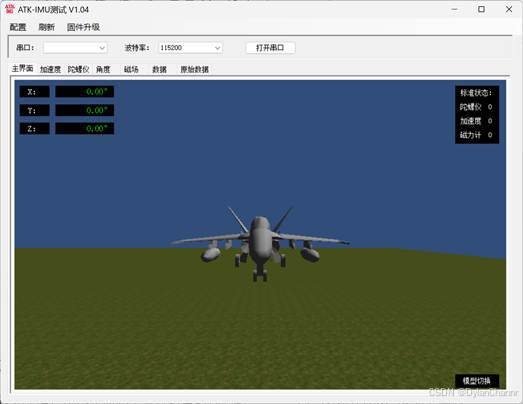
图 2‑2 上位机软件无法显示参数
思考问题,首先排查引脚接线问题,排针的正确接法,短端应穿过模块到另一侧,方便焊接,接好后ATK-IMU601模块正常闪烁蓝灯,接法如图所示:
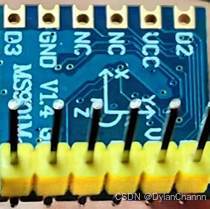
图 2‑3 排针的接法
其次思考代码问题,由于编译下载代码后,STM32板红灯闪烁,查询手册可知此信号代表代码以及烧录成功,故亦排除该问题。
在使用上位机软件配置参数时出现,发现参数无法进行配置,报错的内容如下:读取参数失败CMD_ERROR_SENDCMD或者读取参数失败CMD_STATNS_TIMEOUT,该问题的解决方案给出的是需要升级固件,配置如下:

图 2‑4 上位机软件中的固件升级
然而又报错固件更新异常,客服答复,模块固件更新需要使用到USB-TTL转换器,将ATK-IMU601模块接入USB-TTL转换器后连入电脑即可进行固件升级,升级完毕后进行固件的烧录即可完成该上位机软件的使用。
查看官方视频的接法,具体的引脚接线为:VCC-VCC、RX-TXD(转换器的发送端子)、TX-RXD(转换器的接收端子)、GND-GND。由此可知,该升级固件流程为:由电脑发送升级固件的信息到RXD,经由转换器处理数据后通过TXD传送到IMU模块的RX(UART 数据输入),从而实现固件升级,如图所示:
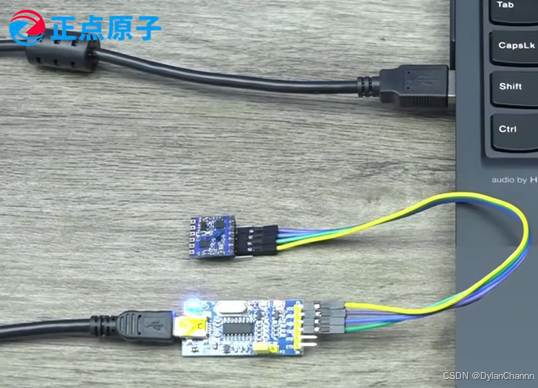
图 2‑5 USB-TTL转换器与IMU模块连线图
2.2.2 解决流程
首先对IMU进行引脚的焊接,以使其连接更为稳定:

图 2‑6 引脚焊接
其次按照GND-GND、VCC-VCC、RX-TXD、TX-RXD的接法连接TTL-USB转接器以及IMU601后,通过USB口连接到电脑,IMU601正常闪光。
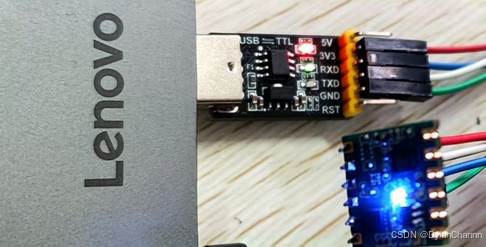
图 2‑7 陀螺仪与转接器连接图
第三步需要下载CH340驱动(由于本人使用的为win11系统,故选择CH341SER_3_8进行安装),打开驱动文件SETUP.EXE后,先点“卸载”,卸载原有驱动后再点安装,安装完成后重启电脑,再重新安装一遍。使用的文件来自于正点原子给出的网盘资料,链接如下:百度网盘 请输入提取码。提取码:1111。
回到上位机的软件首先选择固件升级的在线升级,升级完毕后选择串口并且打开串口,IMU601模块的上位机软件即可正常使用,如图所示:

图 2‑8 IMU模块上位机软件正常运行图
同时可以显示加速度、陀螺仪、姿态角的数据变化折线图:
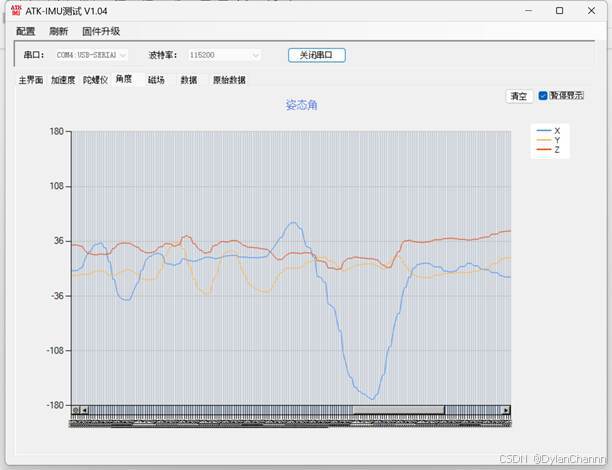
图 2‑9 IMU模块上位机软件数据折线图

















 2876
2876

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









