






需要更多帮助请看主页简介
摘 要
随着汽车逐渐走入寻常家庭,人们对停车设施的要求也越来越高。现代停车场需要具备高效、便捷和智能化的管理能力,以满足日益增长的停车需求。
本设计基于STM32单片机,构建了一套完整的智能停车场系统。系统硬件包括红外对管传感器、步进电机驱动模块、DS1302实时时钟模块、按键输入模块、RFID射频识别模块、蜂鸣器报警、二维码扫描器以及蓝牙模块。通过RFID射频识别模块,车辆可以刷卡进入停车场,同时DS1302实时时钟模块开始计时。用户使用二维码扫描器扫描二维码进行停车费用支付。步进电机驱动模块控制停车场入口和出口的升降杆,支持自动模式。红外对管传感器用于检测车辆的进出,并实时统计停车场内的车辆数量。蓝牙模块实时传输信息。
系统通过LCD显示屏显示当前停车场内的车辆数量、时间和其他相关信息,确保用户和管理人员能够方便地获取停车场的实时状态。智能停车场系统通过高效的硬件配置和信息传输,实现了停车场管理的自动化和智能化,提高了停车场的运行效率和用户体验。
关键词:STM32单片机;射频;智能停车场;
目 录
第3节 基于STM32单片机的智能停车场的研究国内外的研究状况
第1章 绪 论
城市交通拥堵与停车难所产生问题日益严重,随着城市化建设进程的加快和汽车生产保有量的不断增长,国内交通拥堵和停车费力问题日益严重,给城市快速发展带来了巨大压力。据统计,在一些大城市,司机寻找停车位的时间占总行车时间的30%以上。停车难不仅造成了交通拥堵、能源浪费和环境污染,也极大地影响了市民的生活质量。传统停车场管理模式落后,智能化改造迫在眉睫。
时至今日,大多数停车场依然采用传统的人工管理模式,存在着管理效率不足、资源利用率低、用户体验差等问题。随着信息技术的飞速发展,智能停车场管理系统应运而生,通过引入自动化技术和现代化管理手段,能够有效解决传统停车场面临的诸多困境。国家政策大力支持智能交通建设以来,国家出台了一系列政策鼓励智能交通建设,如《智能交通系统顶层设计》《新一代人工智能发展规划》等,旨在推动交通领域的智能化、信息化、自动化进程。智能停车场管理系统作为智能交通系统的重要组成部分,符合国家发展战略,具有广阔的发展前景。
智能停车场系统基于现代自动化技术和现代信息化手段,实施了停车场的智能化管理,提高了管理水平和服务标准,为用户出行更加便捷、更加舒适的停车体验。智能停车场管理系统是智能交通系统的非常重要组成部分,其研究和应用将为智能交通系统的建设提供重要支撑,并推动智能城市的发展。STM32单片机具有性能强劲、功能丰富、成本低廉等优势,非常适合应用于智能系统的设计。基于STM32单片机的智能停车场管理系统设计,将进一步拓展STM32单片机在智能系统领域的应用前景。
智能停车场管理系统可以实现停车资源的高效利用和科学调度,减少司机盲目寻找车位的时间,从而缓解城市交通拥堵,降低能源消耗和环境污染,优化城市交通环境。
智能停车场管理系统基于自动化技术和信息化手段,基本实现了停车场的智能化管理,很大程度的提高了服务水平和管理效率,为用户带来方便快捷、舒心的停车体验。智能停车场管理系统是智能交通系统的重要组成部分,其研究和应用将为智能交通系统的建设提供重要支撑,并且推动智能城市的发展。
STM32单片机具有性能强劲、功能丰富、成本低廉等优势,非常适合应用于智能系统的设计。基于STM32单片机的智能停车场管理系统设计,将进一步拓展STM32单片机在智能系统领域的应用前景。本设计基于STM32单片机,集成了多种先进的硬件模块和软件技术,构建了一套完整的智能停车场管理系统。该系统可以实现自动车辆识别、计时计费、费用支付、车辆监控等多项功能,大大提高了停车场的管理效率和用户体验。
系统采用了红外对管传感器、步进电机驱动模块、DS1302实时时钟模块、按键输入模块、RFID射频识别模块、二维码扫描器以及蓝牙实时传输通信等,可以实现车辆的检测和计数、入口和出口的自动控制、精确的时间计算、人机交互操作、车主识别、费用支付和蓝牙实时传输功能。系统主程序负责协调各个模块的工作流程,中断服务程序处理各种外设中断请求,时钟管理程序实现时间的准确读取,车辆计数程序根据红外对管状态更新车辆数量,升降杆控制程序根据多种信息控制升降杆开闭,费用计算程序计算停车费用,二维码支付程序识别支付二维码,显示程序显示相关信息,视频监控程序等
基于STM32单片机的智能停车场管理系统设计,具有重要的研究背景和意义,值得进一步深入研究和推广应用。
近年来,国家出台了一系列政策大力支持智能交通建设,为智能停车场管理系统的发展提供了良好的政策环境。例如,国务院颁布的《智能交通体系发展纲要》明确提出要"加快推进停车设施智能化建设"。各地方政府也纷纷出台相关政策,鼓励智能停车场的建设和应用。随着政策的推动,国内智能停车场的建设步伐明显加快。一些大中城市已经开始在部分停车场推广智能化改造。例如,北京、上海、深圳等城市,已经建成并投入使用了多个智能停车场,采用了诸如车位引导、自动计费、非现金支付等先进功能。国内企业和科研机构在智能停车场系统的技术创新方面成果丰硕。例如,一些企业研发出基于视觉识别的车牌识别系统、基于物联网的车位检测系统等;一些高校则在STM32单片机程序设计、无线通信技术等方面做出了创新性成果,为智能停车场系统提供了技术支撑。随着技术的进步和应用的推广,国内已经出现了一批专业从事智能停车场系统开发的企业,他们提供了成熟的产品和解决方案。这些产品和解决方案不仅功能齐全、操作便捷,而且具有良好的稳定性和可扩展性,可以满足不同规模停车场的需求。
基于STM32单片机的智能停车场系统设计主要研究内容包括,STM32单片机硬件电路设计、STM32单片机软件程序设计、系统功能模块设计。系统硬件电路主要采用STM32单片机作为主控制器,利用红外对管传感器检测车辆的进出,与单片机通过电平转换电路相连。使用步进电机驱动停车场出入口的升降杆,通过驱动电路与单片机相连。RFID读卡器与单片机通信,用于读取车主的RFID卡进行身份识别。LCD显示屏与单片机连接,用于显示当前停车时间、费用等信息。蓝牙模块实现手机app通信将停车场的车位数量、状态缴费金额上传到app。蜂鸣器首款提醒。
第2章 基于STM32单片机的智能停车场设计方案
第1节 基于STM32单片机的智能停车场设计整体方案
1.1 总体方案设计
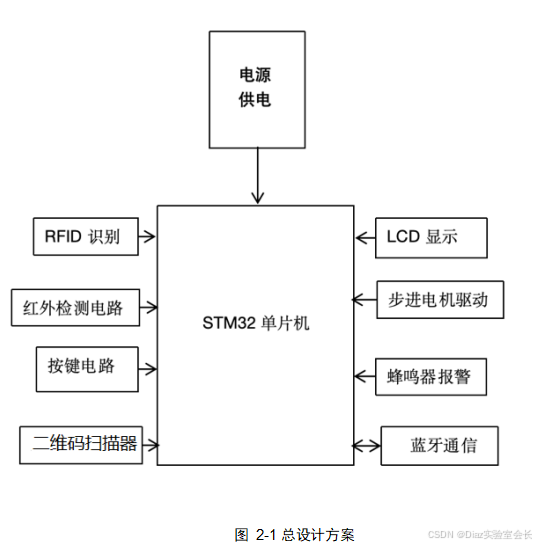
基于STM32单片机的智能停车场管理系统硬件结构由主控制单元、外围模块和电源模块三部分组成、STM32单片机最小系统 单片机采用STM32F103ZET6主控芯片,最小系统包括晶振电路、复位电路、下载接口、蓝牙等。红外对管传感器模块 采用E18-D80NK红外对管传感器,安装在停车场入口和出口,用于检测车辆的进出并进行计数。传感器与单片机通过电平转换电路相连。步进电机驱动模块 使用TB6600步进电机驱动器控制停车场入口的升降杆。该驱动器采用32分辨率的PWM调速,可以平稳控制步进电机的运行。RFID读卡器模块 选用RC522射频读写器芯片,工作频率13.56MHz,读卡距离在10cm左右,用于读取车主的RFID卡进行身份识别。LCD显示模块 采用4.3英寸480x272分辨率的TFT-LCD显示屏,并使用ILI9341驱动芯片,通过8位并行接口与单片机相连,用于显示当前停车时间、费用。蓝牙模块实时传输停车场信息。总设计如下图2-1所示。
RFID读卡块模式进行车主身份识别数据传输进入STM32单片机,步进电机收到抬杆指令,抬杆车辆进入与出去。红外检测电路实时检测进出车辆为显示模块提供信息。液晶显示模块显示停车场的车位数量、停车金额、支付金额。按键模块实时调整当前车位数量。车辆停放完成时二维码模块实时收相应支付的金额。蓝牙模块实现手机app通信将停车场的车位数量、状态、缴费金额上传到app。支付成功后蜂鸣器提醒。
1.2 控制器选型方案
方案一:51系列单片机
51单片机是非常传统和很常见的8位单片机系列,具有个体小、成本低、可靠性高等相关优点。在智能停车场管理系统中,51单片机可以胜任基本的控制和计算任务,如检测车辆进出、计算停车时间和费用等。但是,51单片机也存在一些不足之处:处理能力有限。8位CPU的运算速度和存储空间都有一定限制,可能无法满足系统的实时性和数据处理需求。外设支持有限。51单片机通常只集成了少量外设,如定时器、UART等,可能需要外接更多外围芯片来实现系统所需的功能。开发效率较低。51单片机使用汇编语言或者8051C语言开发,开发效率较低,代码可读性和可维护性也较差。资源匮乏。51单片机相关的资源、工具、文档等正在逐渐减少,未来的发展空间有限。
方案二:MSP430系列单片机
TI公司的MSP430是一款16位低功耗单片机系列,具有超低功耗、丰富外设等特点。在智能停车场管理系统中,MSP430可以发挥其低功耗特性,适合长期供电运行的场景。但MSP430方案也存在一些不足:性能较低。相比32位ARM架构,MSP430的16位CPU性能较低,可能无法满足实时视频处理等高性能需求。生态资源较少。MSP430的生态环境相对较小,开发资源和社区支持都较为匮乏。开发效率一般。MSP430使用C语言开发,相比于ARM架构的集成开发环境(IDE)来说,开发效率略低。
方案三:STM32单片机
STM32是基于ARM Cortex-M内核的32位微控制器系列,集成了丰富的外设资源,具有高性能、低功耗、开发方便等优点。在智能停车场管理系统中,STM32是最佳选择,原因如下:高性能处理能力。STM32采用32位ARM Cortex-M内核,主频可达180MHz,运算能力强劲,可以高效完成实时视频处理、网络通信等任务。丰富的外设资源。STM32集成了丰富的外设,如UART、SPI、I2C、USB、以太网等,无需外接额外芯片,可大幅简化硬件设计。低功耗设计。STM32采用了多种低功耗技术,在满足功耗需求的同时,还能实现高性能运算。良好的开发环境。STM32拥有成熟的开发生态,如Keil、IAR等IDE工具,以及丰富的代码库、中文资料和社区支持,有利于高效开发。强大的扩展能力。STM32产品线丰富,从低端到高端都有对应的型号,未来可以方便地进行升级和扩展。广泛的应用基础。STM32在工业控制、物联网等领域有着广泛的应用,生态资源丰富,维护成本较低。综合考虑性能、功耗、开发效率、生态支持等多方面因素,STM32是设计智能停车场管理系统的最佳单片机控制器选择。
第3章 系统的硬件设计与实现
本章将重点介绍基于STM32单片机的智能停车场系统的硬件设计与实现。在智能停车场系统中,硬件设计是系统功能实现的关键,涉及到各种传感器、执行器和控制模块的选型、连接和布局,直接影响系统的稳定性、可靠性和性能。通过本章的介绍,将了解到智能停车场系统各硬件组成部分的详细设计和实现过程,为系统的整体实现提供技术支持和参考。
第1节 STM32单片机最小系统的硬件电路设计
1.1主控制器设计
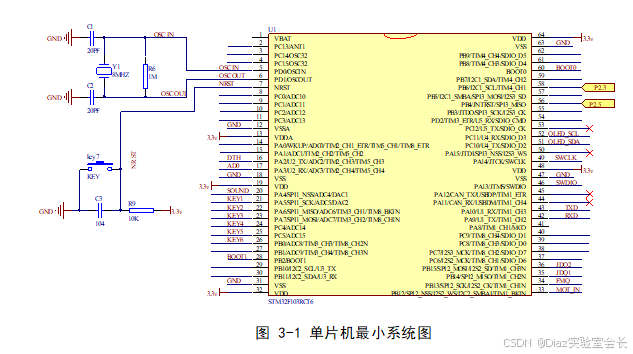
单片机是整个智能停车场管理系统的核心,负责各种外围设备的控制和协调。因此,单片机电路的合理设计对于系统的可靠性和稳定性至关重要。下面将详细介绍基于STM32单片机的智能停车场管理系统的电路设计。最小系统电路是单片机系统的基础,包括时钟电路、复位电路、下载电路和电源电路等。单片机总体内部分为CPU处理芯片、储存器带着IO口。组建协同合作使相应的编译器编写程序并使用在单片机种实现对外围器件使用,所以可以使用在任何种应用场景的控制任务和数据处理中。CPU处理芯片连接:CPU核心通过内部总线连接到存储器、IO口和其他外围设备。存储器和IO口连接:Flash存储器和RAM连接到单片机的相应引脚。IO口通过引脚与外围设备(如传感器、执行器等)连接,具体连接方式根据外围设备的通信协议(如SPI、I2C、UART等)确定。单片机最小系统图如图3-1所示。


















 1426
1426

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









