







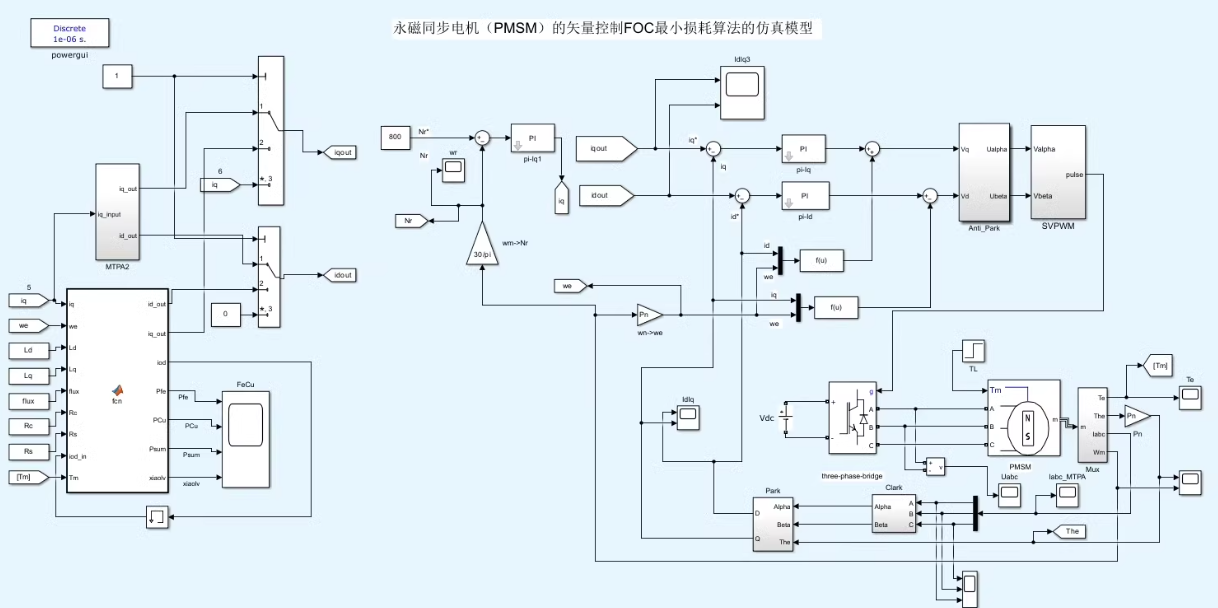
MATLAB/Simulink永磁同步电机(PMSM)的矢量控制FOC最小损耗算法的仿真模型
损耗来源:永磁同步电机的损耗主要包括机械损耗、铜损和铁损。其中,机械损耗随转速和工况的不同而改变,且相对不可控。而铜损和铁损是电气损耗的主要部分,也是FOC最小损耗算法主要关注的优化对象。
永磁同步电机(PMSM)的FOC(Field Oriented Control,也称为矢量控制)最小损耗算法,主要目的是优化电机的运行效率,减少在运行过程中的能量损耗。
好的资料仿真可以事半功倍!很值得学习借鉴的一份仿真,可以有助于您学习和理解!
文章目录
以下是基于MATLAB/Simulink的永磁同步电机(PMSM)矢量控制FOC最小损耗算法的仿真模型设计和实现。代码包括FOC控制的核心部分以及最小损耗优化算法。
1. 模型结构概述
系统主要包括以下部分:
- PMSM模型:使用Simulink中的
PMSM模块。 - FOC控制器:
- 电流解耦控制。
- d-q轴电流参考值计算。
- 最小损耗算法:
- 通过调整d轴电流 (I_d) 来最小化铜损和铁损。
- 速度环PI控制器:用于生成q轴电流参考值 (I_q^*)。
- Clarke-Park变换:将三相电流转换到d-q坐标系。
- SVPWM调制:生成逆变器驱动信号。
2. MATLAB/Simulink 实现
(1) FOC最小损耗算法
function [Id_ref, Iq_ref] = MinLossAlgorithm(speed, torque)
% 输入:电机转速 speed (rad/s),负载转矩 torque (Nm)
% 输出:d轴电流 Id_ref,q轴电流 Iq_ref
% 参数定义
R_s = 0.5; % 定子电阻 (Ohm)
L_d = 0.003; % d轴电感 (H)
L_q = 0.0035; % q轴电感 (H)
Psi_f = 0.1; % 永磁体磁链 (Wb)
% 计算q轴电流参考值 (由负载转矩决定)
P = 4; % 极对数
Iq_ref = torque / (1.5 * P * Psi_f);
% 最小损耗算法:优化d轴电流以减少损耗
if speed > 0
% 使用弱磁控制策略,调整Id_ref
Id_ref = -(Psi_f / L_d) * (1 - sqrt(1 - (torque / (1.5 * P * Psi_f * Iq_ref))^2));
else
% 低速时,Id_ref设为0
Id_ref = 0;
end
end
(2) Simulink 模型设计
(a) 主要模块
-
PMSM模块:
- 使用Simulink自带的
Permanent Magnet Synchronous Machine模块。 - 设置参数如极对数、定子电阻、d-q轴电感、永磁体磁链等。
- 使用Simulink自带的
-
FOC控制器:
- 包括Clarke-Park变换、电流环PI控制器、速度环PI控制器。
- 使用
Math Function模块实现Park反变换。
-
最小损耗算法模块:
- 使用MATLAB Function模块实现上述
MinLossAlgorithm函数。
- 使用MATLAB Function模块实现上述
-
SVPWM模块:
- 使用Simulink自带的
Space Vector PWM Generator模块。
- 使用Simulink自带的
-
逆变器模块:
- 使用
Universal Bridge模块模拟三相逆变器。
- 使用
(3) PI控制器参数整定
% 速度环PI参数
Kp_speed = 0.5;
Ki_speed = 10;
% 电流环PI参数
Kp_current = 1;
Ki_current = 100;
在Simulink中,可以使用PID Controller模块设置这些参数。
(4) Clarke-Park变换
function [id, iq] = ClarkeParkTransform(ia, ib, theta)
% 输入:三相电流 ia, ib 和角度 theta (rad)
% 输出:d轴电流 id,q轴电流 iq
% Clarke变换
i_alpha = ia;
i_beta = (2/3) * ib - (1/3) * ia;
% Park变换
id = i_alpha * cos(theta) + i_beta * sin(theta);
iq = -i_alpha * sin(theta) + i_beta * cos(theta);
end
3. Simulink 模型连接
-
主回路连接:
PMSM→Current Measurement→Clarke Transform→Park Transform→FOC Controller→SVPWM→Inverter→PMSM。
-
控制回路连接:
Speed Reference→Speed PI Controller→Min Loss Algorithm→Current PI Controllers。
—
4. 运行仿真
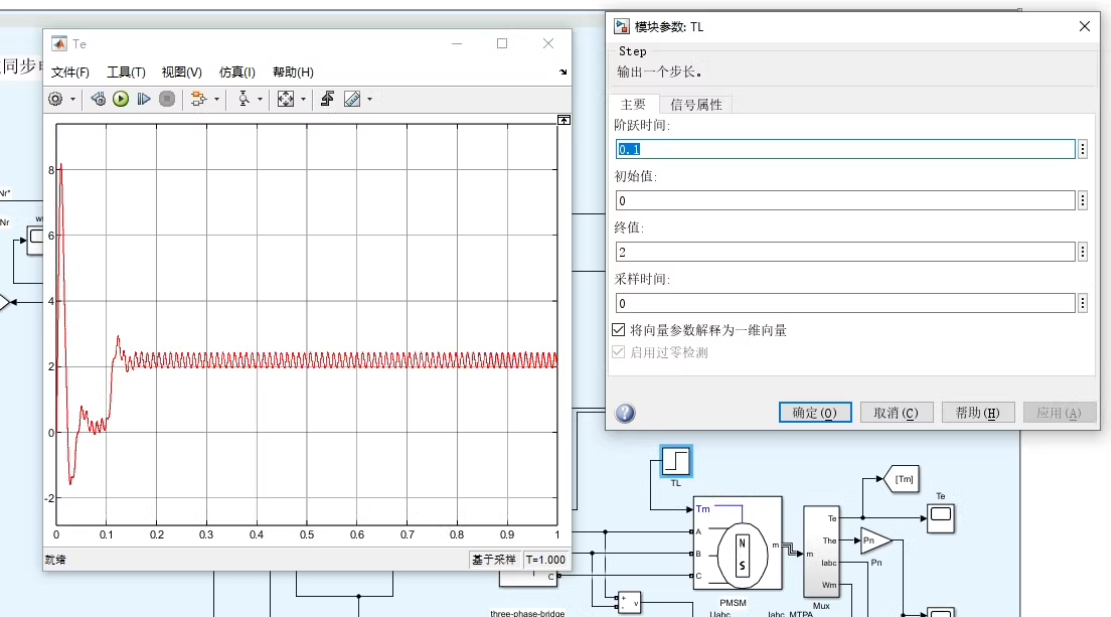
(1) 参数设置
- 仿真时间:1秒。
- 转速参考值:(100 , \text{rad/s})。
- 负载转矩:(5 , \text{Nm})。
(2) 结果观察
- 观察电机转速、d-q轴电流、输出转矩的变化。
- 验证最小损耗算法是否有效降低铜损和铁损。
5. 设计文档说明
(1) 损耗分析
- 铜损:(P_{cu} = R_s (I_d^2 + I_q^2))。
- 铁损:与磁通密度相关,可通过调整 (I_d) 减少。
(2) 最小损耗算法原理
- 在高速运行时,适当增加负的 (I_d) 可以减少铁损。
- 在低速运行时,保持 (I_d = 0) 以减少铜损。
(3) PI参数整定方法
使用Ziegler-Nichols法或试凑法调整PI参数,确保系统响应快速且稳定。

6. 参考文献
- “Field-Oriented Control of Permanent Magnet Synchronous Motors”, IEEE Transactions on Industrial Electronics.
- “Loss Minimization Techniques in Permanent Magnet Synchronous Motor Drives”, IEEE Conference on Power Electronics.
- “Design and Implementation of FOC for PMSM with Minimum Loss Control”, Renewable Energy Journal.
希望以上内容能帮助你构建和理解PMSM的FOC最小损耗算法仿真模型!如果需要更详细的说明或扩展,请随时告知!

















 1356
1356

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









