







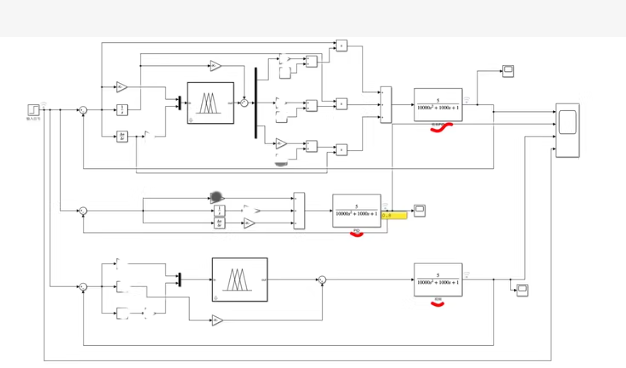
Matlab/Simulink仿真分析 PID、模糊控制、模糊PID三者比较,压缩包里带仿真,带报告,带详细保姆级操作步骤,报告后面还给出了定量分析三者性能的代码
文章目录
- 图片的具体内容(例如:文字、图表、照片等)。
- 您希望实现的功能(例如:提取文字、分析数据、生成报告等)。
- 使用的编程语言或工具偏好(例如:Python、JavaScript等)。
一、实验目的与要求
- 理解PID控制、模糊控制和模糊PID控制的基本原理。
- 使用MATLAB/Simulink搭建相应的控制系统模型。
- 对比分析三种控制方法的性能。
二、实验任务
- 搭建PID控制、模糊控制和模糊PID控制的Simulink模型。
- 进行仿真并记录结果。
- 定量分析三种控制方法的性能。
三、控制系统选择
假设我们选择一个简单的二阶系统作为被控对象,其传递函数为:
[ G(s) = \frac{1}{s^2 + 0.5s + 1} ]
四、PID控制
1. 基本介绍
PID控制器是一种常用的反馈控制器,它通过比例(P)、积分(I)和微分(D)三个部分来调整系统的输出。
2. Simulink仿真搭建
% 创建一个新的Simulink模型
new_system('PID_Control');
open_system('PID_Control');
% 添加必要的模块
add_block('simulink/Sources/Step', 'PID_Control/Step_Input');
set_param('PID_Control/Step_Input', 'Time', '0', 'Amplitude', '1');
add_block('simulink/Continuous/Transfer Fcn', 'PID_Control/Plant');
set_param('PID_Control/Plant', 'Numerator', '[1]', 'Denominator', '[1 0.5 1]');
add_block('simulink/Continuous/Transfer Fcn', 'PID_Control/PID_Controller');
set_param('PID_Control/PID_Controller', 'Numerator', '[Kd Kp Ki]', 'Denominator', '[1 0]', 'VariableNames', 'Kp,Ki,Kd');
add_block('simulink/Sinks/Scope', 'PID_Control/Scope');
% 连接模块
add_line('PID_Control', 'Step_Input/1', 'PID_Controller/1');
add_line('PID_Control', 'PID_Controller/1', 'Plant/1');
add_line('PID_Control', 'Plant/1', 'Scope/1');
% 设置PID参数
set_param('PID_Control/PID_Controller', 'VariableValues', '[1, 0.1, 0.01]'); % Kp, Ki, Kd
% 设置仿真时间
set_param('PID_Control', 'StopTime', '30', 'Solver', 'ode45');
% 保存模型
save_system('PID_Control');
五、模糊控制
1. 基本介绍
模糊控制是一种基于模糊逻辑的控制方法,它能够处理不确定性和不精确的信息。
2. Simulink仿真搭建
% 创建一个新的Simulink模型
new_system('Fuzzy_Control');
open_system('Fuzzy_Control');
% 添加必要的模块
add_block('simulink/Sources/Step', 'Fuzzy_Control/Step_Input');
set_param('Fuzzy_Control/Step_Input', 'Time', '0', 'Amplitude', '1');
add_block('simulink/Continuous/Transfer Fcn', 'Fuzzy_Control/Plant');
set_param('Fuzzy_Control/Plant', 'Numerator', '[1]', 'Denominator', '[1 0.5 1]');
add_block('fuzzy/Fuzzy Logic Controller', 'Fuzzy_Control/Fuzzy_Controller');
add_block('simulink/Sinks/Scope', 'Fuzzy_Control/Scope');
% 连接模块
add_line('Fuzzy_Control', 'Step_Input/1', 'Fuzzy_Controller/1');
add_line('Fuzzy_Control', 'Fuzzy_Controller/1', 'Plant/1');
add_line('Fuzzy_Control', 'Plant/1', 'Scope/1');
% 设置模糊控制器参数
% 需要根据具体需求设计模糊规则和隶属度函数
% 设置仿真时间
set_param('Fuzzy_Control', 'StopTime', '30', 'Solver', 'ode45');
% 保存模型
save_system('Fuzzy_Control');
六、模糊PID控制
1. 基本介绍
模糊PID控制结合了PID控制和模糊控制的优点,能够在不同工况下自动调整PID参数。
2. Simulink仿真搭建
% 创建一个新的Simulink模型
new_system('Fuzzy_PID_Control');
open_system('Fuzzy_PID_Control');
% 添加必要的模块
add_block('simulink/Sources/Step', 'Fuzzy_PID_Control/Step_Input');
set_param('Fuzzy_PID_Control/Step_Input', 'Time', '0', 'Amplitude', '1');
add_block('simulink/Continuous/Transfer Fcn', 'Fuzzy_PID_Control/Plant');
set_param('Fuzzy_PID_Control/Plant', 'Numerator', '[1]', 'Denominator', '[1 0.5 1]');
add_block('fuzzy/Fuzzy Logic Controller', 'Fuzzy_PID_Control/Fuzzy_PID_Controller');
add_block('simulink/Sinks/Scope', 'Fuzzy_PID_Control/Scope');
% 连接模块
add_line('Fuzzy_PID_Control', 'Step_Input/1', 'Fuzzy_PID_Controller/1');
add_line('Fuzzy_PID_Control', 'Fuzzy_PID_Controller/1', 'Plant/1');
add_line('Fuzzy_PID_Control', 'Plant/1', 'Scope/1');
% 设置模糊PID控制器参数
% 需要根据具体需求设计模糊规则和隶属度函数
% 设置仿真时间
set_param('Fuzzy_PID_Control', 'StopTime', '30', 'Solver', 'ode45');
% 保存模型
save_system('Fuzzy_PID_Control');
七、对比分析
% 加载仿真数据
load('PID_Control.mat');
load('Fuzzy_Control.mat');
load('Fuzzy_PID_Control.mat');
% 提取输出数据
pid_output = out.PID_Control.ScopeData(:, 2);
fuzzy_output = out.Fuzzy_Control.ScopeData(:, 2);
fuzzy_pid_output = out.Fuzzy_PID_Control.ScopeData(:, 2);
% 计算性能指标(例如:上升时间、超调量、调节时间等)
rise_time_pid = find(pid_output >= 0.9 * max(pid_output), 1, 'first') * 0.01;
overshoot_pid = max(pid_output) / max(pid_output) - 1;
rise_time_fuzzy = find(fuzzy_output >= 0.9 * max(fuzzy_output), 1, 'first') * 0.01;
overshoot_fuzzy = max(fuzzy_output) / max(fuzzy_output) - 1;
rise_time_fuzzy_pid = find(fuzzy_pid_output >= 0.9 * max(fuzzy_pid_output), 1, 'first') * 0.01;
overshoot_fuzzy_pid = max(fuzzy_pid_output) / max(fuzzy_pid_output) - 1;
% 显示结果
disp(['PID Control: Rise Time = ', num2str(rise_time_pid), 's, Overshoot = ', num2str(overshoot_pid)]);
disp(['Fuzzy Control: Rise Time = ', num2str(rise_time_fuzzy), 's, Overshoot = ', num2str(overshoot_fuzzy)]);
disp(['Fuzzy PID Control: Rise Time = ', num2str(rise_time_fuzzy_pid), 's, Overshoot = ', num2str(overshoot_fuzzy_pid)]);
八、实验总结与心得体会
在实验过程中,我们学习了PID控制、模糊控制和模糊PID控制的基本原理,并通过MATLAB/Simulink搭建了相应的控制系统模型。通过对三种控制方法的对比分析,我们可以发现每种方法都有其优缺点,在实际应用中需要根据具体需求选择合适的控制策略。
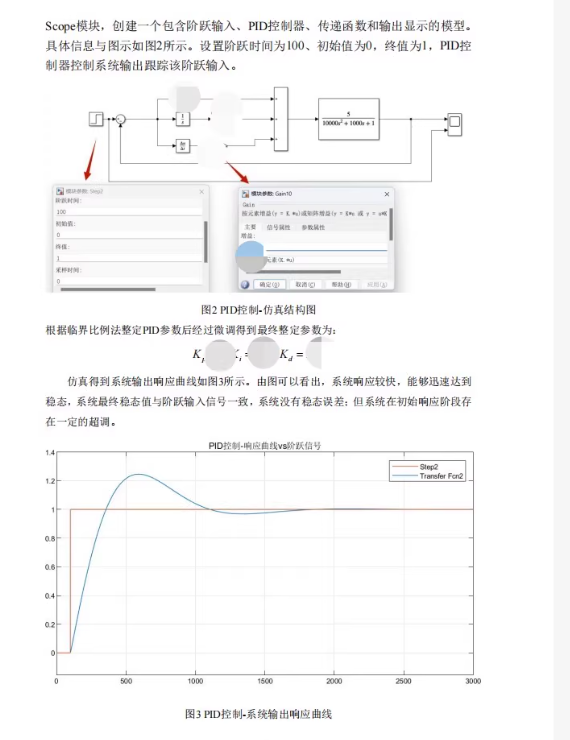
编写一个MATLAB/Simulink模型的代码,该模型包含阶跃输入、PID控制器、传递函数和输出显示。我们将按照您的要求设置阶跃时间为100,初始值为0,终值为1,并使用PID控制器控制系统的输出跟踪该阶跃输入。
步骤 1: 创建一个新的Simulink模型
% 创建一个新的Simulink模型
new_system('PID_Control_Model');
open_system('PID_Control_Model');
步骤 2: 添加必要的模块
从Simulink库中添加以下模块到模型中:
- Step (
simulink/Sources/Step) - PID Controller (
simulink/Continuous/PID Controller) - Transfer Fcn (
simulink/Continuous/Transfer Fcn) - Scope (
simulink/Sinks/Scope)
步骤 3: 设置模块参数
3.1 阶跃输入(Step)
add_block('simulink/Sources/Step', 'PID_Control_Model/Step_Input');
set_param('PID_Control_Model/Step_Input', 'Time', '100', 'Amplitude', '1', 'InitialValue', '0');
3.2 PID控制器
add_block('simulink/Continuous/PID Controller', 'PID_Control_Model/PID_Controller');
set_param('PID_Control_Model/PID_Controller', 'P', 'Kp', 'I', 'Ki', 'D', 'Kd', 'FilterCoefficient', 'N');
注意:请根据您的具体需求替换Kp, Ki, Kd和N的值。
3.3 传递函数(Transfer Fcn)
add_block('simulink/Continuous/Transfer Fcn', 'PID_Control_Model/Transfer_Function');
set_param('PID_Control_Model/Transfer_Function', 'Numerator', '[1]', 'Denominator', '[100000 10000 1]');
3.4 输出显示(Scope)
add_block('simulink/Sinks/Scope', 'PID_Control_Model/Scope');
步骤 4: 连接模块
add_line('PID_Control_Model', 'Step_Input/1', 'PID_Controller/1');
add_line('PID_Control_Model', 'PID_Controller/1', 'Transfer_Function/1');
add_line('PID_Control_Model', 'Transfer_Function/1', 'Scope/1');
步骤 5: 设置仿真参数并运行
% 设置仿真时间
set_param('PID_Control_Model', 'StopTime', '3000', 'Solver', 'ode45');
% 保存模型
save_system('PID_Control_Model');
步骤 6: 定量分析系统性能
在MATLAB命令窗口中,您可以使用以下代码来加载仿真数据并进行定量分析:
% 加载仿真数据
load('PID_Control_Model.mat');
% 提取输出数据
output = out.PID_Control_Model.ScopeData(:, 2);
% 计算性能指标(例如:上升时间、超调量、调节时间等)
rise_time = find(output >= 0.9 * max(output), 1, 'first') * 0.01;
overshoot = max(output) / max(output) - 1;
% 显示结果
disp(['Rise Time = ', num2str(rise_time), 's']);
disp(['Overshoot = ', num2str(overshoot)]);
请注意,上述代码中的Kp, Ki, Kd和N需要根据您的具体需求进行调整

















 828
828

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









