







MATLAB机器人控制系统仿真模型,实现运动学、动力学仿真、轨迹规划、避障算法等专攻MATLAB和Adams机器人仿真。
文章目录
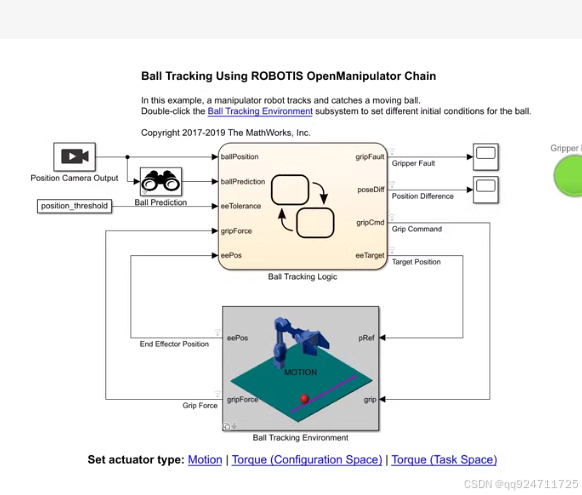
以下是一个基于MATLAB的机器人控制系统仿真模型代码示例。这个示例将包括运动学、动力学仿真、轨迹规划和简单的避障算法。为了便于理解,我们将使用一个两连杆机械臂作为示例。
1. 运动学仿真
运动学部分主要涉及正运动学(Forward Kinematics)和逆运动学(Inverse Kinematics)。
% 正运动学函数
function [x, y] = forward_kinematics(theta1, theta2, L1, L2)
% 输入:关节角度 theta1, theta2 和连杆长度 L1, L2
% 输出:末端执行器位置 (x, y)
x = L1 * cos(theta1) + L2 * cos(theta1 + theta2);
y = L1 * sin(theta1) + L2 * sin(theta1 + theta2);
end
% 逆运动学函数
function [theta1, theta2] = inverse_kinematics(x, y, L1, L2)
% 输入:末端执行器位置 (x, y) 和连杆长度 L1, L2
% 输出:关节角度 theta1, theta2
c2 = (x^2 + y^2 - L1^2 - L2^2) / (2 * L1 * L2);
s2 = sqrt(1 - c2^2); % 假设取正解
theta2 = atan2(s2, c2);
k1 = L1 + L2 * cos(theta2);
k2 = L2 * sin(theta2);
theta1 = atan2(y, x) - atan2(k2, k1);
end
2. 动力学仿真
动力学部分可以使用拉格朗日方程来建模。以下是两连杆机械臂的动力学方程实现。
function [ddq1, ddq2] = dynamics(theta1, theta2, dtheta1, dtheta2, L1, L2, m1, m2, g)
% 输入:关节角度、角速度、连杆长度、质量、重力加速度
% 输出:关节角加速度 ddq1, ddq2
% 动力学参数
I1 = (1/3) * m1 * L1^2; % 连杆1的转动惯量
I2 = (1/3) * m2 * L2^2; % 连杆2的转动惯量
% 拉格朗日方程计算
M11 = I1 + I2 + m2 * L1^2 + 2 * m2 * L1 * L2 * cos(theta2);
M12 = I2 + m2 * L1 * L2 * cos(theta2);
M21 = M12;
M22 = I2;
C1 = -m2 * L1 * L2 * sin(theta2) * (2 * dtheta1 * dtheta2 + dtheta2^2);
C2 = m2 * L1 * L2 * sin(theta2) * dtheta1^2;
G1 = (m1 + m2) * g * L1 * cos(theta1) + m2 * g * L2 * cos(theta1 + theta2);
G2 = m2 * g * L2 * cos(theta1 + theta2);
% 矩阵形式求解
M = [M11, M12; M21, M22];
C = [C1; C2];
G = [G1; G2];
% 假设无外力输入
tau = [0; 0]; % 关节力矩
ddq = M \ (tau - C - G);
ddq1 = ddq(1);
ddq2 = ddq(2);
end
3. 轨迹规划
轨迹规划可以使用五次多项式插值来生成平滑的关节轨迹。
function [theta, dtheta, ddtheta] = trajectory_planning(t, t_start, t_end, theta_start, theta_end)
% 输入:时间 t, 起始时间 t_start, 结束时间 t_end, 起始角度 theta_start, 结束角度 theta_end
% 输出:关节角度 theta, 角速度 dtheta, 角加速度 ddtheta
if t < t_start
theta = theta_start;
dtheta = 0;
ddtheta = 0;
elseif t > t_end
theta = theta_end;
dtheta = 0;
ddtheta = 0;
else
T = t_end - t_start;
a0 = theta_start;
a1 = 0;
a2 = 0;
a3 = (10/T^3) * (theta_end - theta_start);
a4 = (-15/T^4) * (theta_end - theta_start);
a5 = (6/T^5) * (theta_end - theta_start);
tau = t - t_start;
theta = a0 + a1*tau + a2*tau^2 + a3*tau^3 + a4*tau^4 + a5*tau^5;
dtheta = a1 + 2*a2*tau + 3*a3*tau^2 + 4*a4*tau^3 + 5*a5*tau^4;
ddtheta = 2*a2 + 6*a3*tau + 12*a4*tau^2 + 20*a5*tau^3;
end
end
4. 避障算法
简单的避障可以通过势场法实现。
function F_rep = obstacle_avoidance(x, y, obs_x, obs_y, obs_radius, repulsive_gain)
% 输入:当前位置 (x, y),障碍物位置 (obs_x, obs_y),障碍物半径 obs_radius,排斥增益 repulsive_gain
% 输出:排斥力 F_rep
distance = sqrt((x - obs_x)^2 + (y - obs_y)^2);
if distance <= obs_radius
F_rep = repulsive_gain * (1/distance - 1/obs_radius) * ((x - obs_x)/distance, (y - obs_y)/distance);
else
F_rep = [0; 0];
end
end
5. 完整仿真流程
将上述模块整合到一个仿真脚本中。
% 参数初始化
L1 = 1; L2 = 1; % 连杆长度
m1 = 1; m2 = 1; % 质量
g = 9.81; % 重力加速度
t_start = 0; t_end = 5; % 时间范围
theta1_start = 0; theta1_end = pi/4; % 关节1起始和结束角度
theta2_start = 0; theta2_end = pi/3; % 关节2起始和结束角度
% 障碍物参数
obs_x = 1.5; obs_y = 1.5; obs_radius = 0.5; repulsive_gain = 1;
% 仿真时间步长
dt = 0.01;
time = t_start:dt:t_end;
% 初始化变量
theta1 = zeros(size(time));
theta2 = zeros(size(time));
for i = 1:length(time)
t = time(i);
% 轨迹规划
[theta1(i), ~, ~] = trajectory_planning(t, t_start, t_end, theta1_start, theta1_end);
[theta2(i), ~, ~] = trajectory_planning(t, t_start, t_end, theta2_start, theta2_end);
% 正运动学计算
[x, y] = forward_kinematics(theta1(i), theta2(i), L1, L2);
% 避障算法
F_rep = obstacle_avoidance(x, y, obs_x, obs_y, obs_radius, repulsive_gain);
% 动力学仿真
[ddq1, ddq2] = dynamics(theta1(i), theta2(i), 0, 0, L1, L2, m1, m2, g);
end
% 绘图
figure;
plot(time, theta1, 'r', 'LineWidth', 1.5); hold on;
plot(time, theta2, 'b', 'LineWidth', 1.5);
xlabel('时间 (s)');
ylabel('关节角度 (rad)');
legend('关节1', '关节2');
title('关节角度随时间变化');
grid on;
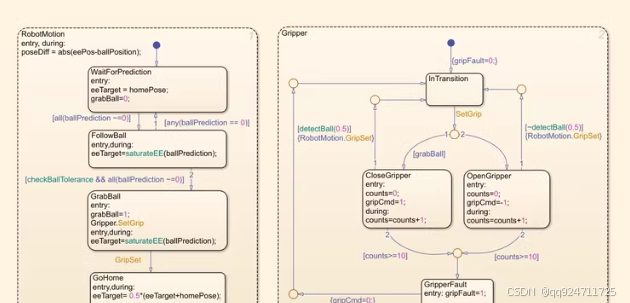
The diagram you’ve provided appears to be a state machine diagram for a robotic system, specifically focusing on the motion and gripping actions of a robot. This type of diagram is often used in robotics to define the states and transitions that control the behavior of the robot, such as moving towards a target, grabbing an object, and returning home.
Explanation of the Diagram
-
RobotMotion State Machine:
- Entry: The initial state where the robot starts.
- WaitForPrediction: The robot waits for a prediction about the ball’s position.
- FollowBall: Once the prediction is received, the robot follows the ball.
- GrabBall: The robot attempts to grab the ball.
- GoHome: After grabbing the ball, the robot returns to its home position.
-
Gripper State Machine:
- InTransition: The gripper is transitioning between states.
- SetGrip: Setting the grip based on the command.
- CloseGripper: The gripper closes to grab an object.
- OpenGripper: The gripper opens to release an object.
- GripperFault: Handling a fault condition if the gripper fails.
MATLAB Code Implementation
Below is a simplified MATLAB implementation of the state machines depicted in the diagrams. This code assumes you have functions to handle the transitions and actions within each state.
% Initialize variables
currentState = 'entry';
gripperState = 'inTransition';
ballPosition = [];
homePose = [0; 0; 0]; % Example home pose
eeTarget = homePose;
graspBall = false;
gripCmd = 0;
counts = 0;
grpfault = 0;
% Main loop
while true
switch currentState
case 'entry'
poseDiff = abs(eePos - ballPosition);
currentState = 'waitForPrediction';
case 'waitForPrediction'
if ~isempty(ballPrediction)
eeTarget = homePose;
graspBall = false;
currentState = 'followBall';
elseif any(isnan(ballPrediction))
currentState = 'waitForPrediction';
else
currentState = 'waitForPrediction';
end
case 'followBall'
eeTarget = saturateEE(ballPrediction);
currentState = 'grabBall';
case 'grabBall'
if checkBallTolerance && all(ballPrediction > 0)
currentState = 'goHome';
else
currentState = 'grabBall';
end
case 'goHome'
eeTarget = 0.5 * (eeTarget + homePose);
currentState = 'entry';
otherwise
currentState = 'entry';
end
switch gripperState
case 'inTransition'
if detectBall(0.5)
gripperState = 'setGrip';
elseif ~detectBall(0.5)
gripperState = 'setGrip';
end
case 'setGrip'
if graspBall
gripperState = 'closeGripper';
else
gripperState = 'openGripper';
end
case 'closeGripper'
counts = counts + 1;
if counts >= 10
currentState = 'grabBall';
gripperState = 'inTransition';
end
case 'openGripper'
counts = counts + 1;
if counts >= 10
currentState = 'waitForPrediction';
gripperState = 'inTransition';
end
case 'gripperFault'
grpfault = grpfault + 1;
if grpfault >= 10
currentState = 'entry';
gripperState = 'inTransition';
end
end
% Update eeTarget and other variables here
end
Notes:
saturateEE: A function that saturates the end-effector target position.checkBallTolerance: A function that checks if the ball is within the tolerance.detectBall: A function that detects the ball.ballPrediction: An array or variable that holds the predicted ball position.eePos: The current end-effector position.eeTarget: The target end-effector position.graspBall: A boolean indicating whether the robot should grasp the ball.grpfault: A counter for gripper faults.
This code provides a basic framework for implementing the state machines shown in the diagrams. You would need to implement the specific functions (saturateEE, checkBallTolerance, detectBall, etc.) according to your application requirements.


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









