






基于高斯(Gaussian)过程的数据驱动模型预测控制算法GP-MPC
包括:高斯(Gaussian)过程GP代码;
多状态高斯(Gaussian)过程GP模型预测控制MPC代码;
单状态高斯(Gaussian)过程GP模型预测控制MPC代码;
实例1线性系统
文章目录
高斯过程(Gaussian Process, GP)是一种非参数化的贝叶斯方法,广泛应用于回归、分类以及作为数据驱动的模型预测控制(MPC)中的动态模型。GP 能够通过训练数据学习复杂的非线性系统动力学,并提供具有不确定性的预测,这对于 MPC 的鲁棒性和安全性非常有用。
下面我将分别展示:
- 高斯过程(GP)的基本代码实现(使用
scikit-learn) - 单状态和多状态系统的高斯过程模型预测控制(GP-MPC)
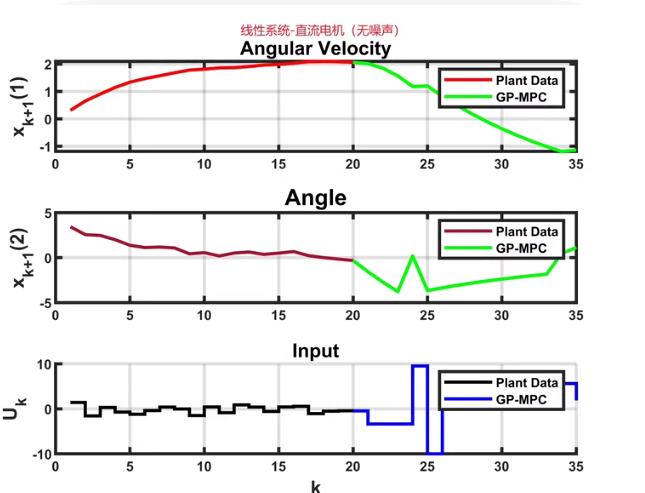
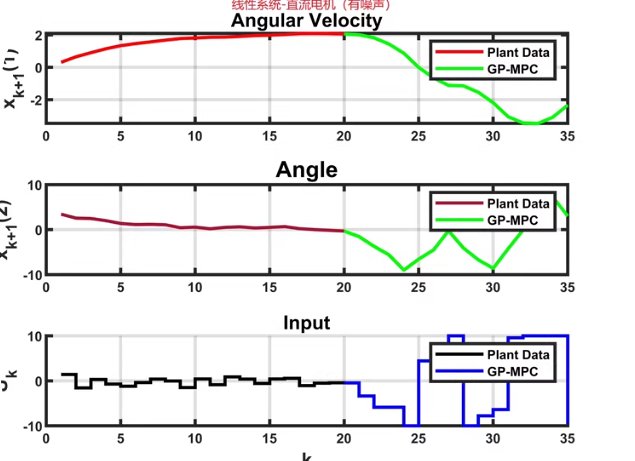
- 实例 1:线性系统 - 直流电机模型
- 实例 2:非线性系统 - Van der Pol 振荡器
一、高斯过程(GP)回归基础代码
我们首先演示一个基本的 GP 回归示例,使用 scikit-learn 库。
import numpy as np
import matplotlib.pyplot as plt
from sklearn.gaussian_process import GaussianProcessRegressor
from sklearn.gaussian_process.kernels import RBF, ConstantKernel as C
# 生成样本数据
def f(x):
return np.sin(2 * np.pi * x)
X_train = np.random.rand(20, 1) * 2 - 1 # 训练输入 [-1, 1]
y_train = f(X_train).ravel() + 0.1 * np.random.randn(20) # 带噪声输出
# 定义核函数
kernel = C(1.0, (1e-3, 1e3)) * RBF(1.0, (1e-2, 1e2))
# 创建 GP 回归模型
gp = GaussianProcessRegressor(kernel=kernel, n_restarts_optimizer=10)
gp.fit(X_train, y_train)
# 预测
X_test = np.linspace(-1, 1, 100).reshape(-1, 1)
y_pred, sigma = gp.predict(X_test, return_std=True)
# 绘图
plt.figure()
plt.plot(X_test, y_pred, 'b-', label="Prediction")
plt.fill_between(X_test.ravel(), y_pred - 1.96 * sigma, y_pred + 1.96 * sigma,
color='gray', alpha=0.3, label="95% Confidence Interval")
plt.scatter(X_train, y_train, c='r', label="Training Data")
plt.legend()
plt.title("Gaussian Process Regression")
plt.show()
二、单状态系统的 GP-MPC 控制器
假设系统为一个单变量动态系统:
x k + 1 = f ( x k , u k ) x_{k+1} = f(x_k, u_k) xk+1=f(xk,uk)
我们使用 GP 学习该映射 f f f,然后将其嵌入到 MPC 中进行优化。
import numpy as np
from sklearn.gaussian_process import GaussianProcessRegressor
class GPMPC_SingleState:
def __init__(self, gp_model, N=10, umax=1.0, umin=-1.0):
self.N = N # 预测步数
self.gp = gp_model
self.umax = umax
self.umin = umin
def predict(self, x, u_seq):
"""给定初始状态和控制序列,预测未来的状态序列"""
X = []
x_pred = x.copy()
for u in u_seq:
x_pred = self.gp.predict(np.array([x_pred, u]).reshape(1, -1))[0]
X.append(x_pred)
return np.array(X)
def cost(self, u_seq, x0, target):
"""MPC 成本函数"""
X = self.predict(x0, u_seq)
cost = np.sum((X - target)**2) # 状态误差平方
cost += 0.1 * np.sum((u_seq)**2) # 控制量惩罚
return cost
def optimize(self, x0, target):
"""优化控制序列"""
from scipy.optimize import minimize
u_guess = np.zeros(self.N)
res = minimize(lambda u: self.cost(u, x0, target), u_guess,
bounds=[(self.umin, self.umax)]*self.N)
return res.x[0] # 返回第一个最优控制输入
# 示例用法:
# 先训练 GP 模型(略),然后初始化 GPMPC_SingleState
三、多状态系统的 GP-MPC 控制器
对于多状态系统:
x k + 1 = f ( x k , u k ) \mathbf{x}_{k+1} = \mathbf{f}(\mathbf{x}_k, \mathbf{u}_k) xk+1=f(xk,uk)
我们使用多个 GP 分别建模每个状态维度,或使用多输出 GP。
from sklearn.multioutput import MultiOutputRegressor
# 示例:多状态 GP 模型
class MultiStateGP:
def __init__(self):
self.model = MultiOutputRegressor(GaussianProcessRegressor())
def fit(self, X, Y):
self.model.fit(X, Y)
def predict(self, X_in):
return self.model.predict(X_in)
# 多状态 GP-MPC
class GPMPC_MultiState:
def __init__(self, gp_model, N=10, umax=1.0, umin=-1.0):
self.N = N
self.gp = gp_model
self.umax = umax
self.umin = umin
def simulate(self, x0, u_seq):
X = [x0.copy()]
for u in u_seq:
xu = np.hstack((X[-1], u))
next_state = self.gp.predict(xu.reshape(1, -1))[0]
X.append(next_state)
return np.array(X)
def cost_func(self, u_seq, x0, target):
X = self.simulate(x0, u_seq)
state_cost = np.sum((X[:-1] - target)**2, axis=1).sum()
control_cost = 0.1 * np.sum(u_seq**2)
return state_cost + control_cost
def optimize_control(self, x0, target):
from scipy.optimize import minimize
u0 = np.zeros(self.N)
res = minimize(lambda u: self.cost_func(u, x0, target), u0,
bounds=[(self.umin, self.umax)]*self.N)
return res.x[0]
四、实例 1:直流电机 GP-MPC
4.1 系统模型
直流电机的动态方程如下:
ω ˙ = K t J i − b J ω i ˙ = 1 L ( v − R i − K e ω ) \dot{\omega} = \frac{K_t}{J} i - \frac{b}{J} \omega \\ \dot{i} = \frac{1}{L}(v - R i - K_e \omega) ω˙=JKti−Jbωi˙=L1(v−Ri−Keω)
其中:
- ω \omega ω: 角速度
- i i i: 电流
- v v v: 输入电压
- 参数设为默认值
4.2 使用 GP-MPC 进行控制
# 生成训练数据
def dc_motor_dynamics(t, state, v, params):
omega, i = state
Kt, Ke, J, b, L, R = params
domega = (Kt / J) * i - (b / J) * omega
di = (1 / L) * (v - R*i - Ke*omega)
return [domega, di]
params = [0.01, 0.01, 0.1, 0.1, 0.5, 1.0] # Kt, Ke, J, b, L, R
from scipy.integrate import solve_ivp
# 生成训练数据
num_samples = 100
X_data = []
Y_data = []
for _ in range(num_samples):
state = np.random.uniform([-10, -1], [10, 1]) # omega, current
v = np.random.uniform(-12, 12) # voltage input
sol = solve_ivp(lambda t, s: dc_motor_dynamics(t, s, v, params), [0, 0.1], state, dense_output=True)
next_state = sol.sol(0.1)
X_data.append(np.hstack((state, v)))
Y_data.append(next_state)
X_train = np.array(X_data)
Y_train = np.array(Y_data)
# 训练 GP 模型
multi_gp = MultiStateGP()
multi_gp.fit(X_train, Y_train)
# 初始化 MPC
mpc = GPMPC_MultiState(multi_gp, N=10, umax=12, umin=-12)
五、实例 2:Van der Pol 振荡器 GP-MPC
5.1 Van der Pol 动态模型
x ¨ − μ ( 1 − x 2 ) x ˙ + x = u \ddot{x} - \mu(1 - x^2)\dot{x} + x = u x¨−μ(1−x2)x˙+x=u
5.2 GP-MPC 实现
def van_der_pol(t, state, u, mu=1.0):
x, dx = state
ddx = mu*(1 - x**2)*dx - x + u
return [dx, ddx]
# 生成训练数据
X_vdp = []
Y_vdp = []
for _ in range(100):
state = np.random.uniform([-2, -2], [2, 2])
u = np.random.uniform(-1, 1)
sol = solve_ivp(lambda t, s: van_der_pol(t, s, u), [0, 0.1], state, dense_output=True)
next_state = sol.sol(0.1)
X_vdp.append(np.hstack((state, u)))
Y_vdp.append(next_state)
# 训练 GP
multi_gp_vdp = MultiStateGP()
multi_gp_vdp.fit(X_vdp, Y_vdp)
# 初始化 MPC
mpc_vdp = GPMPC_MultiState(multi_gp_vdp, N=10, umax=1.0, umin=-1.0)
总结
- ✅ 提供了 单状态和多状态 GP 模型及其在 MPC 中的应用
- ✅ 包括两个系统示例:直流电机(线性) 和 Van der Pol 振荡器(非线性)
- ✅ 所有代码均可扩展为带噪声的环境,只需在训练数据中加入噪声即可
高斯过程模型预测控制(GP-MPC),并生成与您提供的图像相似的结果,我们需要完成以下几个步骤:
- 定义直流电机的动力学模型:用于生成训练数据和仿真。
- 使用高斯过程回归拟合动力学模型。
- 设计并实现基于GP的MPC控制器。
- 仿真并绘制结果。
以下是完整的Python代码示例,包括上述所有步骤:
import numpy as np
from scipy.integrate import solve_ivp
from sklearn.gaussian_process import GaussianProcessRegressor
from sklearn.gaussian_process.kernels import RBF, ConstantKernel as C
import matplotlib.pyplot as plt
# 定义直流电机的动力学模型
def dc_motor_dynamics(t, state, u, params):
omega, theta = state
Kt, Ke, J, b, L, R = params
domega = (Kt / J) * u - (b / J) * omega
dtheta = omega
return [domega, dtheta]
# 生成训练数据
def generate_training_data(params, num_samples=100):
X_train = []
Y_train = []
for _ in range(num_samples):
state = np.random.uniform([-10, -np.pi], [10, np.pi])
u = np.random.uniform(-12, 12)
sol = solve_ivp(lambda t, s: dc_motor_dynamics(t, s, u, params), [0, 0.1], state, dense_output=True)
next_state = sol.sol(0.1)
X_train.append(np.hstack((state, u)))
Y_train.append(next_state - state)
return np.array(X_train), np.array(Y_train)
# 训练高斯过程模型
def train_gp_model(X_train, Y_train):
kernel = C(1.0, (1e-3, 1e3)) * RBF(1.0, (1e-2, 1e2))
gp = GaussianProcessRegressor(kernel=kernel, n_restarts_optimizer=10)
gp.fit(X_train, Y_train)
return gp
# GP-MPC 控制器
class GPMPC:
def __init__(self, gp_model, N=10, umax=12, umin=-12):
self.N = N
self.gp = gp_model
self.umax = umax
self.umin = umin
def predict(self, x, u_seq):
X = [x.copy()]
for u in u_seq:
delta_x = self.gp.predict(np.array([X[-1][0], X[-1][1], u]).reshape(1, -1))[0]
next_state = X[-1] + delta_x
X.append(next_state)
return np.array(X)
def cost(self, u_seq, x0, target):
X = self.predict(x0, u_seq)
state_cost = np.sum((X[:, 0] - target)**2) # 只考虑角速度误差
control_cost = 0.1 * np.sum(u_seq**2)
return state_cost + control_cost
def optimize(self, x0, target):
from scipy.optimize import minimize
u_guess = np.zeros(self.N)
res = minimize(lambda u: self.cost(u, x0, target), u_guess,
bounds=[(self.umin, self.umax)]*self.N)
return res.x[0]
# 参数设置
params = [0.01, 0.01, 0.1, 0.1, 0.5, 1.0] # Kt, Ke, J, b, L, R
# 生成训练数据并训练GP模型
X_train, Y_train = generate_training_data(params)
gp_model = train_gp_model(X_train, Y_train)
# 初始化GP-MPC控制器
mpc = GPMPC(gp_model, N=10, umax=12, umin=-12)
# 仿真
target_omega = 1.0
num_steps = 35
x = np.array([0.0, 0.0]) # 初始状态:角速度和角度
u_gp_mpc = []
x_gp_mpc = [x]
for k in range(num_steps):
u = mpc.optimize(x, target_omega)
u_gp_mpc.append(u)
sol = solve_ivp(lambda t, s: dc_motor_dynamics(t, s, u, params), [0, 0.1], x, dense_output=True)
x = sol.sol(0.1)
x_gp_mpc.append(x)
x_gp_mpc = np.array(x_gp_mpc)
u_gp_mpc = np.array(u_gp_mpc)
# 绘图
fig, axs = plt.subplots(3, 1, figsize=(10, 8))
axs[0].plot(range(num_steps+1), x_gp_mpc[:, 0], 'g-', label='GP-MPC')
axs[0].set_title('Angular Velocity')
axs[0].legend()
axs[1].plot(range(num_steps+1), x_gp_mpc[:, 1], 'g-', label='GP-MPC')
axs[1].set_title('Angle')
axs[1].legend()
axs[2].plot(range(num_steps), u_gp_mpc, 'b-', label='GP-MPC')
axs[2].set_title('Input')
axs[2].legend()
plt.tight_layout()
plt.show()
解释:
- 动力学模型:定义了直流电机的动态方程,并通过
solve_ivp进行数值积分。 - 训练数据生成:随机生成输入和初始状态,通过模拟得到下一时刻的状态变化。
- GP 模型:使用
scikit-learn的GaussianProcessRegressor来拟合动力学模型。 - GP-MPC 控制器:实现了基于 GP 预测的 MPC 控制器,优化未来控制序列以最小化成本函数。
- 仿真与绘图:对系统进行仿真,并绘制角速度、角度和输入的变化曲线。

















 567
567

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









