







如何使用MATLAB实现四旋翼飞行器的鲁棒状态反馈HOO控制
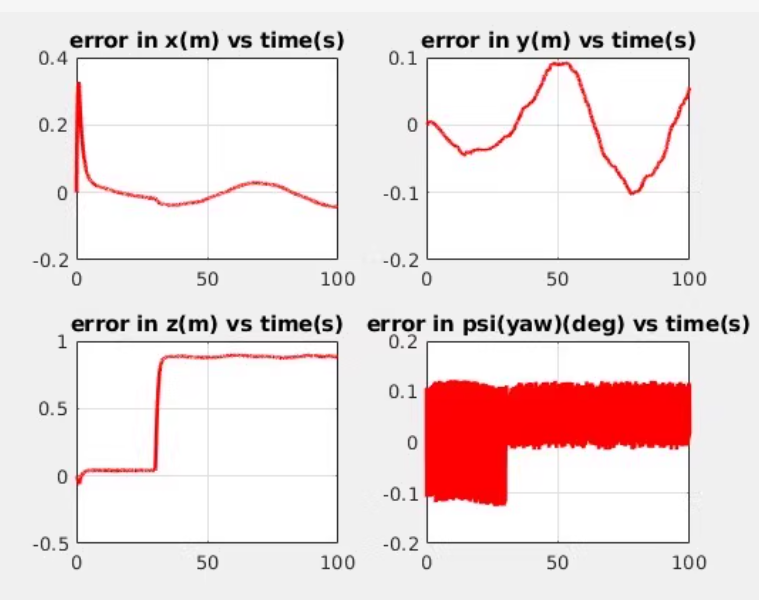
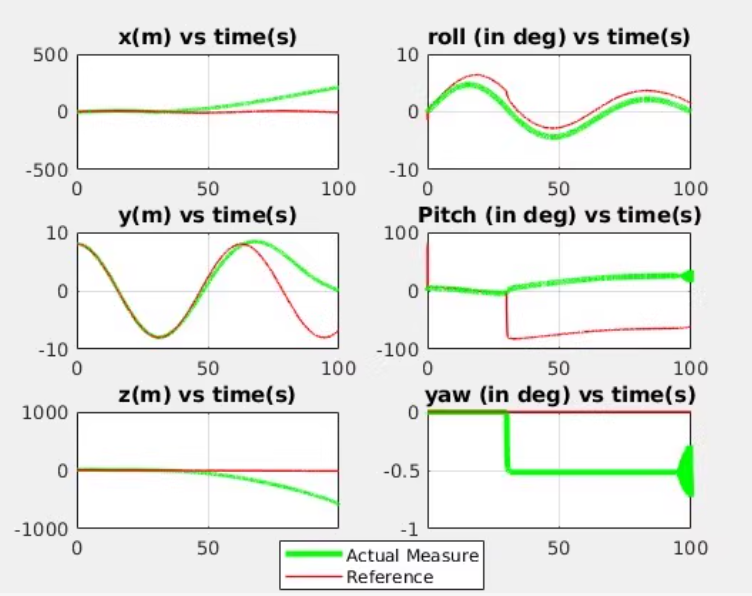
简介:H∞控制是一种在 20 世纪 70 年代出现的鲁棒控制算法。它抑制干扰的最大频率响应,以确保系统的鲁棒性。这里提供了一个使用 H∞控制稳定四旋翼的代码。该代码是一个MATLAB仿真脚本,用于模拟四旋翼无人机在H-infinity控制下的飞行轨迹跟踪。代码包括无人机动力学建模、H-infinity控制器设计、路径规划、状态反馈控制以及结果可视化,展示了从初始化到动画显示和多图绘制的完整过程。
实现四旋翼飞行器的鲁棒状态反馈H∞(H-infinity)控制,首先需要对四旋翼系统进行建模,并基于该模型设计一个H∞控制器。H∞控制是一种用于处理不确定性、外部干扰和性能优化的鲁棒控制方法。下面我将提供一个简化的步骤说明以及示例代码框架来帮助你开始在MATLAB中实现这一过程。
步骤概述
- 建立四旋翼系统的线性模型:通常采用小扰动假设下的线性化模型。
- 定义性能权重函数:根据期望的性能指标选择适当的加权函数。
- 使用MATLAB工具箱设计H∞控制器:利用
hinfsyn函数或其他相关工具设计控制器。 - 仿真验证:通过仿真验证控制器的有效性。
示例代码
以下是一个简化版的MATLAB代码示例,展示了如何使用hinfsyn函数来设计一个H∞控制器。请注意,你需要根据实际的四旋翼模型调整此代码。
% 假设已经有一个四旋翼的线性化状态空间模型 (A, B, C, D)
% A: 状态矩阵
% B: 输入矩阵
% C: 输出矩阵
% D: 直接传递矩阵
% 例如:
A = [0 1 0 0; -1 0 0 0; 0 0 0 1; 0 0 -1 0]; % 示例矩阵
B = [0; 1; 0; 1]; % 示例输入矩阵
C = [1 0 0 0; 0 0 1 0]; % 示例输出矩阵
D = zeros(2, 1); % 直接传递矩阵
% 定义性能权重函数 W1 和 W2
W1 = makeweight(1e3, [], 0.1); % 例子中的权重函数
W2 = makeweight(1e2, [], 0.5); % 例子中的权重函数
% 创建增广植物 P
P = augw(ss(A, B, C, D), W1, [], W2);
% 使用 hinfsyn 设计 H-infinity 控制器
[K, CL, GAM] = hinfsyn(P, 1, 1); % 1 输入, 1 输出的情况
% 显示最优的 H-infinity 范数
disp(['Optimal gamma: ', num2str(GAM)]);
% 对比开环与闭环系统的响应
figure;
bode(P)
title('开环系统的频率响应')
figure;
bode(CL)
title('闭环系统的频率响应')
% 进行时域仿真验证
T = 0:0.01:10; % 时间向量
r = ones(size(T)); % 参考信号
[y, t, x] = lsim(CL, r, T); % 模拟闭环系统响应
figure;
plot(t, y);
xlabel('时间 (秒)');
ylabel('输出');
title('闭环系统响应');
这段代码提供了一个基本框架,具体实施时需要替换为真实的四旋翼模型参数,并根据具体情况调整权重函数。此外,MATLAB的Control System Toolbox提供了丰富的工具和函数来辅助完成这些任务,包括但不限于augw, hinfsyn, bode, lsim等。
请确保你的MATLAB环境安装了Control System Toolbox,因为上述功能依赖于该工具箱提供的函数。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









