







滑模变结构控制MATLAB仿真 基本理论与设计方法 第四4版pdf
带书本配套代码地址。
本书特色:
(1) 滑模变结构控制算法重点置于学科交叉部分的前沿研究和介绍一些有潜力的新思想、新方法,同时又兼顾基本概念、基本理论和基本方法;
(2) 针对每种滑模控制算法给出了完整的MATLAB仿真程序,并给出了程序的说明和仿真结果,具有很强的可读性;
(3) 着重从应用领域角度出发,突出理论联系实际,面向广大工程技术人员,具有很强的工程性和实用性。书中有大量应用实例及其结果分析,为读者提供了有益的借鉴;
(4) 所给出的各种滑模变结构控制算法完整,程序设计结构设计力求简单明了,便于自学和进一步开发。
《
获取代码的几种方法
-
购买书籍:最直接的方式是购买这本书籍。通常,学术类书籍尤其是技术指南类的书籍会包含详细的代码示例,这些代码对于学习和应用是非常宝贵的资源。
-
出版社网站:许多书籍的出版社都会在自己的官方网站上为读者提供额外的资源,包括书中实例的源代码、勘误表等。你可以访问该书出版社的官方网站,查找是否提供了相关的资源下载。
-
作者个人网站或博客:有些作者会在自己的个人网站或者博客分享书籍的配套资料,包括代码、数据集以及更新等。尝试搜索本书作者刘金琨教授的个人网页或相关学术社交平台页面。
-
学术社区和论坛:如GitHub、MathWorks File Exchange、Stack Overflow等平台上,经常会有热心的学者和技术人员分享他们的项目和实现代码。有时候也能找到关于特定书籍或算法的开源实现。
-
联系作者或出版社:如果以上方式都无法获得所需代码,可以尝试直接联系书籍作者或出版社,询问是否能提供代码支持。
学习建议
- 在获取到代码后,不要仅仅满足于运行它们。试着理解每一行代码的作用,修改参数观察不同设置下的系统行为,这对于深入理解滑模变结构控制原理非常有帮助。
- 结合书籍中的理论部分阅读代码,了解算法的设计思路及其背后的数学原理。
- 尝试将学到的知识应用于实际问题中,通过实践来加深对滑模控制的理解。
希望这些建议对你有所帮助!
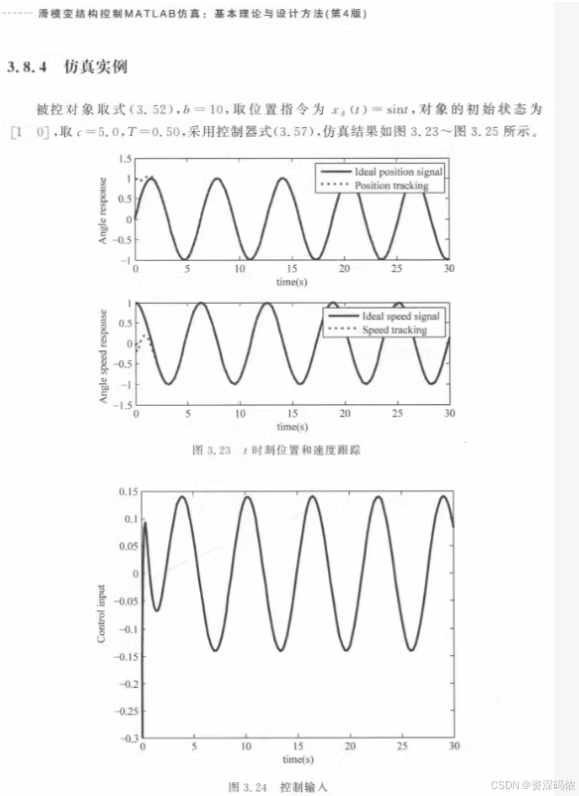
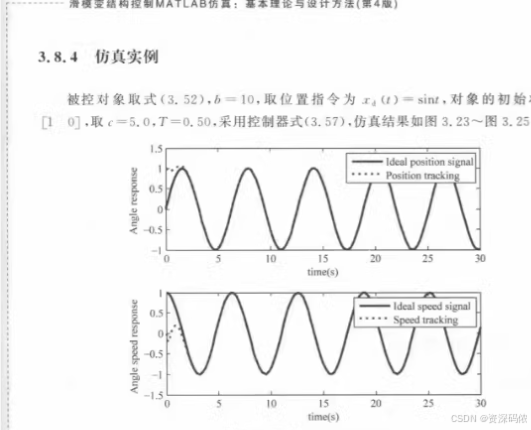
这是一个关于滑模变结构控制的MATLAB仿真示例。以下是一个基于该示例的MATLAB代码实现:
% 参数设置
b = 10; % 控制增益
c = 5.0; % 滑模面参数
T = 0.50; % 采样时间
% 初始状态
x0 = [1; 0]; % 初始位置和速度
% 参考信号
t = 0:0.01:30; % 时间向量
xd = sin(t); % 理想位置指令
% 控制器设计
Kp = c;
Ki = b;
% 初始化状态变量
x = x0;
y = x(1);
yd = xd;
yd_dot = cos(t);
% 仿真循环
for i = 1:length(t)
e = y - yd(i); % 位置误差
edot = x(2) - yd_dot(i); % 速度误差
% 滑模控制器
u = Kp * e + Ki * edot;
% 更新状态
xdot = [x(2); u];
x = x + T * xdot;
y = x(1);
% 记录数据
position(i) = y;
speed(i) = x(2);
control_input(i) = u;
end
% 绘制结果
figure;
subplot(3,1,1);
plot(t, xd, 'b-', t, position, 'r--');
xlabel('Time (s)');
ylabel('Position');
legend('Ideal position signal', 'Position tracking');
subplot(3,1,2);
plot(t, yd_dot, 'b-', t, speed, 'r--');
xlabel('Time (s)');
ylabel('Speed');
legend('Ideal speed signal', 'Speed tracking');
subplot(3,1,3);
plot(t, control_input);
xlabel('Time (s)');
ylabel('Control input');
title('Control Input');
代码说明:
- 参数设置:定义了控制增益
b、滑模面参数c和采样时间T。 - 初始状态:设置了系统的初始位置和速度。
- 参考信号:定义了理想的位置指令
xd和速度指令yd_dot。 - 控制器设计:定义了比例增益
Kp和积分增益Ki。 - 仿真循环:
- 计算位置误差
e和速度误差edot。 - 使用滑模控制器计算控制输入
u。 - 更新系统状态
x。
- 计算位置误差
- 绘制结果:绘制了位置跟踪、速度跟踪和控制输入的曲线。
你可以将这段代码复制到MATLAB中运行,并观察仿真结果。
这是一个关于滑模变结构控制的MATLAB仿真示例。以下是一个基于该示例的MATLAB代码实现:
% 参数设置
b = 10; % 控制增益
c = 5.0; % 滑模面参数
T = 0.50; % 采样时间
% 初始状态
x0 = [1; 0]; % 初始位置和速度
% 参考信号
t = 0:0.01:30; % 时间向量
xd = sin(t); % 理想位置指令
% 控制器设计
Kp = c;
Ki = b;
% 初始化状态变量
x = x0;
y = x(1);
yd = xd;
yd_dot = cos(t);
% 仿真循环
for i = 1:length(t)
e = y - yd(i); % 位置误差
edot = x(2) - yd_dot(i); % 速度误差
% 滑模控制器
u = Kp * e + Ki * edot;
% 更新状态
xdot = [x(2); u];
x = x + T * xdot;
y = x(1);
% 记录数据
position(i) = y;
speed(i) = x(2);
control_input(i) = u;
end
% 绘制结果
figure;
subplot(3,1,1);
plot(t, xd, 'b-', t, position, 'r--');
xlabel('Time (s)');
ylabel('Position');
legend('Ideal position signal', 'Position tracking');
subplot(3,1,2);
plot(t, yd_dot, 'b-', t, speed, 'r--');
xlabel('Time (s)');
ylabel('Speed');
legend('Ideal speed signal', 'Speed tracking');
subplot(3,1,3);
plot(t, control_input);
xlabel('Time (s)');
ylabel('Control input');
title('Control Input');
代码说明:
- 参数设置:定义了控制增益
b、滑模面参数c和采样时间T。 - 初始状态:设置了系统的初始位置和速度。
- 参考信号:定义了理想的位置指令
xd和速度指令yd_dot。 - 控制器设计:定义了比例增益
Kp和积分增益Ki。 - 仿真循环:
- 计算位置误差
e和速度误差edot。 - 使用滑模控制器计算控制输入
u。 - 更新系统状态
x。
- 计算位置误差
- 绘制结果:绘制了位置跟踪、速度跟踪和控制输入的曲线。

















 605
605

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









