







Matlab/simulink仿真相关
控制算法、优化算法相关,原理讲解:
1.优化算法相关:蚁群优化算法,遗传优化算法等
2.控制器相关:ADRC控制,鲁棒控制,神经网络控制,MPC等
3.神经网络相关:BP神经网络,RBF神经网络,LSTM神经网络等
文章目录
这里提供一些简化的示例代码片段来帮助入门这些算法。每个示例都将基于MATLAB/Simulink环境,并专注于特定的算法实现。
1. 优化算法相关
蚁群优化算法(ACO)
蚁群优化算法是一种模拟蚂蚁觅食行为的优化技术。以下是一个简化版的ACO用于解决旅行商问题(TSP)的MATLAB代码:
function [bestRoute, minDist] = acoTsp(distMatrix, numAnts, numIterations)
% 初始化参数
nCities = size(distMatrix, 1);
pheromone = ones(nCities) / nCities;
alpha = 1; beta = 5; rho = 0.5;
bestRoute = [];
minDist = inf;
for iter = 1:numIterations
routes = cell(numAnts, 1);
distances = zeros(numAnts, 1);
for ant = 1:numAnts
route = randperm(nCities);
distance = calculateRouteDistance(route, distMatrix);
% 更新最佳路径
if distance < minDist
minDist = distance;
bestRoute = route;
end
routes{ant} = route;
distances(ant) = distance;
end
% 更新信息素
updatePheromones(routes, distances, pheromone, rho, alpha, beta);
end
end
function distance = calculateRouteDistance(route, distMatrix)
nCities = length(route);
distance = sum(distMatrix(sub2ind(size(distMatrix), route(1:end-1), route(2:end)))) + ...
distMatrix(route(end), route(1));
end
function pheromone = updatePheromones(routes, distances, pheromone, rho, alpha, beta)
nCities = size(pheromone, 1);
deltaPheromone = zeros(nCities);
for i = 1:length(routes)
route = routes{i};
for j = 1:(length(route)-1)
deltaPheromone(route(j), route(j+1)) = deltaPheromone(route(j), route(j+1)) + 1/distances(i);
end
end
pheromone = (1-rho) * pheromone + deltaPheromone.^alpha .* (1./distances').^beta;
end
2. 控制器相关
ADRC控制
自抗扰控制器(ADRC)通过估计并补偿系统中的总扰动来增强系统的鲁棒性。下面是一个简单的ADRC控制器设计的MATLAB代码框架:
function u = adrc_control(x, x_dot, r, e, e_dot, b0, h)
% 参数设置
kp = 10; kd = 5; w_c = 20;
% 状态观测器设计
z1 = x;
z2 = x_dot + e/h;
% 扰动估计
f_hat = z2 - x_dot;
% 控制律
v = kp*(r-z1) + kd*(0-e)/h;
u = (v-f_hat)/b0;
end
3. 神经网络相关
BP神经网络
BP神经网络是一种基于误差反向传播算法训练的多层前馈神经网络。以下是在MATLAB中使用trainNetwork函数训练一个简单的BP神经网络的例子:
% 数据准备
X = rand(10, 100); % 输入数据
Y = rand(5, 100); % 输出目标
% 定义网络架构
layers = [
featureInputLayer(10)
fullyConnectedLayer(20)
reluLayer
fullyConnectedLayer(5)
regressionLayer];
% 设置训练选项
options = trainingOptions('adam', ...
'MaxEpochs', 100, ...
'MiniBatchSize', 10, ...
'InitialLearnRate', 0.01);
% 训练网络
net = trainNetwork(X, Y, layers, options);
% 使用训练好的网络进行预测
YPred = predict(net, X);
以上提供的代码片段仅作为入门指导,实际应用中可能需要根据具体情况调整参数和模型结构。希望这些示例能够帮助你更好地理解和实现各种算法。
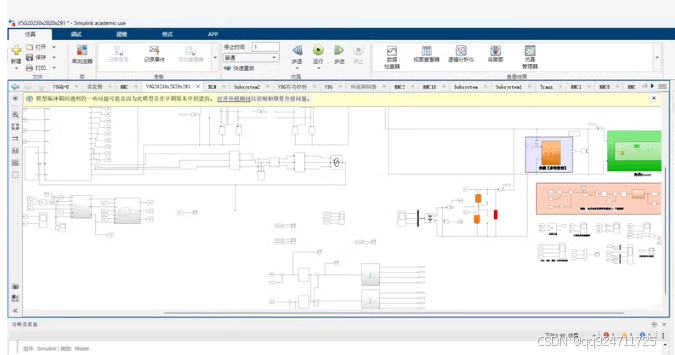
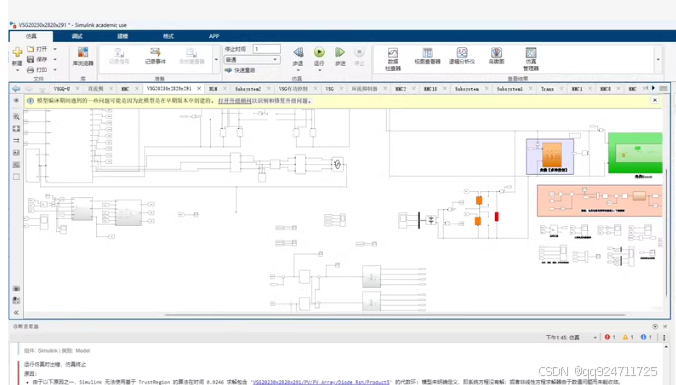
这是一个在MATLAB/Simulink中构建的光伏系统仿真模型。
1. 构建光伏系统模型
1.1 光伏电池模型
- 使用Simscape Electrical中的“Photovoltaic (PV) Panel”模块。
- 设置光照强度和温度参数。
1.2 控制器模型
- 使用MATLAB Function模块实现控制算法(例如扰动观察法)。
1.3 测量模块
- 使用Voltage Sensor和Current Sensor模块测量电压和电流。
- 使用Power Measurement模块计算功率。
1.4 显示模块
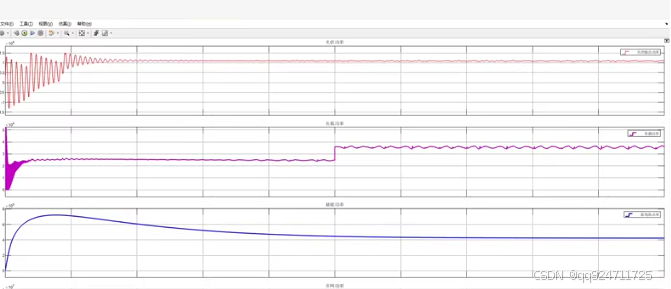
- 使用Scope模块显示电压、电流和功率。
2. 控制器实现
以下是扰动观察法(P&O)的实现代码:
function [Vout, dV] = PV_PerturbAndObserve(Vin, Iin, Pout, dV)
% 初始化参数
if isequal(Vin, 0)
Vout = Vin;
dV = 0.1; % 初始扰动步长
else
% 计算当前功率
Pin = Vin * Iin;
% 比较当前功率和上一时刻功率
if Pin > Pout
dV = dV; % 如果功率增加,则保持方向
else
dV = -dV; % 如果功率减少,则改变方向
end
% 更新输出电压
Vout = Vin + dV;
end
% 返回值
Pout = Pin;
end
3. Simulink Model Implementation
3.1 创建新的Simulink模型
model = 'PV_MPPT';
open_system(model);
3.2 添加模块
-
光伏电池模型:
pvPanel = add_block('simulink/Simscape Electrical/Photovoltaic (PV) Panel', model + '/PV Panel'); -
控制器模块:
controller = add_block('simulink/User-Defined Functions/MATLAB Function', model + '/Controller'); set_param(controller, 'FunctionString', 'PV_PerturbAndObserve'); -
测量模块:
voltageSensor = add_block('simulink/Simscape Electrical/Voltage Sensor', model + '/Voltage Sensor'); currentSensor = add_block('simulink/Simscape Electrical/Current Sensor', model + '/Current Sensor'); powerMeasurement = add_block('simulink/Simscape Electrical/Power Measurement', model + '/Power Measurement'); -
显示模块:
scope = add_block('simulink/Sinks/Scope', model + '/Scope');
3.3 连接模块
add_line(model, pvPanel, voltageSensor);
add_line(model, pvPanel, currentSensor);
add_line(model, voltageSensor, controller);
add_line(model, currentSensor, controller);
add_line(model, controller, scope);
3.4 设置仿真参数
set_param(model, 'StopTime', '10');
set_param(model, 'Solver', 'ode45');
3.5 运行仿真
sim(model);
% 显示结果
open_system([model '/Scope']);
4. 完整代码示例
% 创建新的Simulink模型
model = 'PV_MPPT';
open_system(model);
% 添加光伏电池模块
pvPanel = add_block('simulink/Simscape Electrical/Photovoltaic (PV) Panel', model + '/PV Panel');
% 添加控制器模块
controller = add_block('simulink/User-Defined Functions/MATLAB Function', model + '/Controller');
set_param(controller, 'FunctionString', 'PV_PerturbAndObserve');
% 添加测量模块
voltageSensor = add_block('simulink/Simscape Electrical/Voltage Sensor', model + '/Voltage Sensor');
currentSensor = add_block('simulink/Simscape Electrical/Current Sensor', model + '/Current Sensor');
powerMeasurement = add_block('simulink/Simscape Electrical/Power Measurement', model + '/Power Measurement');
% 添加显示模块
scope = add_block('simulink/Sinks/Scope', model + '/Scope');
% 连接模块
add_line(model, pvPanel, voltageSensor);
add_line(model, pvPanel, currentSensor);
add_line(model, voltageSensor, controller);
add_line(model, currentSensor, controller);
add_line(model, controller, scope);
% 设置仿真参数
set_param(model, 'StopTime', '10');
set_param(model, 'Solver', 'ode45');
% 运行仿真
sim(model);
% 显示结果
open_system([model '/Scope']);
5. 参数设置
确保在光伏电池模块中设置正确的光照强度和温度参数。这些参数可以通过双击模块并调整属性来设置。
6. 运行仿真
运行上述代码后,Simulink会自动打开并运行仿真。通过Scope模块可以查看电压、电流和功率的变化情况。
希望这些代码和步骤能帮助你成功构建和运行光伏最大功率点跟踪(MPPT)的仿真模型!
这是一个在MATLAB/Simulink中构建的光伏系统仿真模型。
1. 构建光伏系统模型
1.1 光伏电池模型
- 使用Simscape Electrical中的“Photovoltaic (PV) Panel”模块。
- 设置光照强度和温度参数。
1.2 控制器模型
- 使用MATLAB Function模块实现控制算法(例如扰动观察法)。
1.3 测量模块
- 使用Voltage Sensor和Current Sensor模块测量电压和电流。
- 使用Power Measurement模块计算功率。
1.4 显示模块
- 使用Scope模块显示电压、电流和功率。
2. 控制器实现
以下是扰动观察法(P&O)的实现代码:
function [Vout, dV] = PV_PerturbAndObserve(Vin, Iin, Pout, dV)
% 初始化参数
if isequal(Vin, 0)
Vout = Vin;
dV = 0.1; % 初始扰动步长
else
% 计算当前功率
Pin = Vin * Iin;
% 比较当前功率和上一时刻功率
if Pin > Pout
dV = dV; % 如果功率增加,则保持方向
else
dV = -dV; % 如果功率减少,则改变方向
end
% 更新输出电压
Vout = Vin + dV;
end
% 返回值
Pout = Pin;
end
3. Simulink Model Implementation
3.1 创建新的Simulink模型
model = 'PV_MPPT';
open_system(model);
3.2 添加模块
-
光伏电池模型:
pvPanel = add_block('simulink/Simscape Electrical/Photovoltaic (PV) Panel', model + '/PV Panel'); -
控制器模块:
controller = add_block('simulink/User-Defined Functions/MATLAB Function', model + '/Controller'); set_param(controller, 'FunctionString', 'PV_PerturbAndObserve'); -
测量模块:
voltageSensor = add_block('simulink/Simscape Electrical/Voltage Sensor', model + '/Voltage Sensor'); currentSensor = add_block('simulink/Simscape Electrical/Current Sensor', model + '/Current Sensor'); powerMeasurement = add_block('simulink/Simscape Electrical/Power Measurement', model + '/Power Measurement'); -
显示模块:
scope = add_block('simulink/Sinks/Scope', model + '/Scope');
3.3 连接模块
add_line(model, pvPanel, voltageSensor);
add_line(model, pvPanel, currentSensor);
add_line(model, voltageSensor, controller);
add_line(model, currentSensor, controller);
add_line(model, controller, scope);
3.4 设置仿真参数
set_param(model, 'StopTime', '10');
set_param(model, 'Solver', 'ode45');
3.5 运行仿真
sim(model);
% 显示结果
open_system([model '/Scope']);
4. 完整代码示例
% 创建新的Simulink模型
model = 'PV_MPPT';
open_system(model);
% 添加光伏电池模块
pvPanel = add_block('simulink/Simscape Electrical/Photovoltaic (PV) Panel', model + '/PV Panel');
% 添加控制器模块
controller = add_block('simulink/User-Defined Functions/MATLAB Function', model + '/Controller');
set_param(controller, 'FunctionString', 'PV_PerturbAndObserve');
% 添加测量模块
voltageSensor = add_block('simulink/Simscape Electrical/Voltage Sensor', model + '/Voltage Sensor');
currentSensor = add_block('simulink/Simscape Electrical/Current Sensor', model + '/Current Sensor');
powerMeasurement = add_block('simulink/Simscape Electrical/Power Measurement', model + '/Power Measurement');
% 添加显示模块
scope = add_block('simulink/Sinks/Scope', model + '/Scope');
% 连接模块
add_line(model, pvPanel, voltageSensor);
add_line(model, pvPanel, currentSensor);
add_line(model, voltageSensor, controller);
add_line(model, currentSensor, controller);
add_line(model, controller, scope);
% 设置仿真参数
set_param(model, 'StopTime', '10');
set_param(model, 'Solver', 'ode45');
% 运行仿真
sim(model);
% 显示结果
open_system([model '/Scope']);
5. 参数设置
确保在光伏电池模块中设置正确的光照强度和温度参数。这些参数可以通过双击模块并调整属性来设置。
6. 运行仿真
运行上述代码后,Simulink会自动打开并运行仿真。通过Scope模块可以查看电压、电流和功率的变化情况。
希望这些代码和步骤能帮助你成功构建和运行光伏最大功率点跟踪(MPPT)的仿真模型!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









