







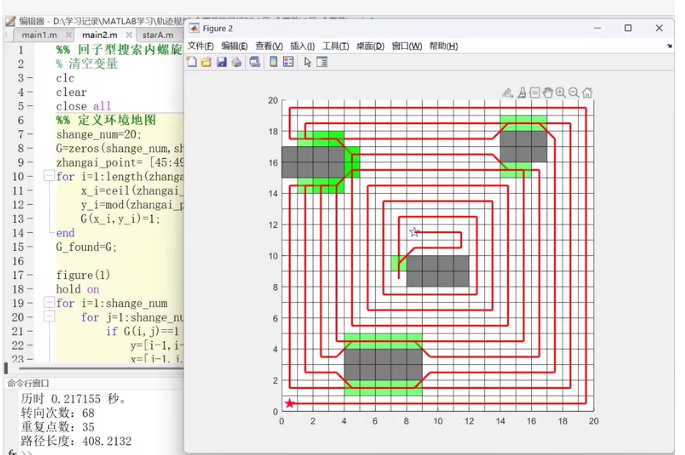
全覆盖路径规划算法(往复式和内螺旋式,死区采用 A 星算法脱离)
matlab实现代码
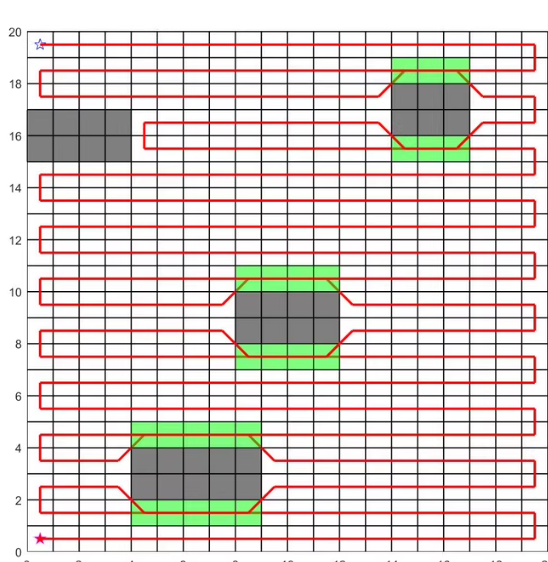
往返式全覆盖路径规划
通过建立二维栅格地图,设置障碍物(可以自行设置),根据定义的优先级运动规则从起始点开始进行全图遍历,利用A星算法逃离死角位置,可以四邻域或者八邻域搜索,避开障碍物寻找最近的未覆盖节点,继续进行全图覆盖,最后绘制全覆盖路径,输出路径长度,转向次数,重复点数等 。
以下是一个基于 MATLAB 的往返式全覆盖路径规划算法实现代码,结合了 A 星算法用于脱离死区。该代码实现了四邻域搜索,并绘制了覆盖路径。
% MATLAB 实现往返式全覆盖路径规划算法
clc;
clear;
close all;
%% 初始化参数
rows = 10; % 地图行数
cols = 10; % 地图列数
map = zeros(rows, cols); % 创建二维栅格地图
obstacle = [3, 3; 4, 5; 6, 7; 7, 8]; % 障碍物位置
start = [1, 1]; % 起始点
% 设置障碍物
for i = 1:size(obstacle, 1)
map(obstacle(i, 1), obstacle(i, 2)) = 1;
end
% 定义运动方向(四邻域)
directions = [0, 1; 1, 0; 0, -1; -1, 0]; % 右、下、左、上
direction_names = {'右', '下', '左', '上'};
% 初始化变量
current_pos = start;
path = current_pos; % 记录路径
visited = zeros(rows, cols); % 访问标记
visited(current_pos(1), current_pos(2)) = 1;
turn_count = 0; % 转向次数
repeat_count = 0; % 重复访问次数
%% 往返式路径规划主循环
while true
% 检查是否完成全图覆盖
if sum(visited(:)) == rows * cols - size(obstacle, 1)
break;
end
% 按当前方向前进
moved = false;
for i = 1:size(directions, 1)
next_pos = current_pos + directions(i, :);
% 检查边界和障碍物
if next_pos(1) >= 1 && next_pos(1) <= rows && ...
next_pos(2) >= 1 && next_pos(2) <= cols && ...
map(next_pos(1), next_pos(2)) == 0
% 检查是否已经访问过
if visited(next_pos(1), next_pos(2)) == 0
current_pos = next_pos;
path = [path; current_pos];
visited(current_pos(1), current_pos(2)) = 1;
moved = true;
break;
else
repeat_count = repeat_count + 1;
end
end
end
% 如果无法前进,尝试用 A* 算法寻找最近的未覆盖节点
if ~moved
[nearest_unvisited, a_star_path] = find_nearest_unvisited(current_pos, visited, map, directions);
if isempty(a_star_path)
break; % 无解
end
% 更新路径
path = [path; a_star_path(2:end, :)];
current_pos = nearest_unvisited;
visited(current_pos(1), current_pos(2)) = 1;
turn_count = turn_count + 1;
end
end
%% 绘制结果
figure;
hold on;
% 绘制地图
imagesc(visited);
colormap([1 1 1; 0 0 0; 0 1 0]); % 白色:空地,黑色:障碍物,绿色:路径
axis equal;
axis tight;
% 绘制路径
for i = 1:size(path, 1) - 1
plot([path(i, 2), path(i+1, 2)], [path(i, 1), path(i+1, 1)], 'r-', 'LineWidth', 2);
end
title('往返式全覆盖路径规划');
xlabel('X');
ylabel('Y');
% 输出统计信息
disp(['路径长度: ', num2str(size(path, 1))]);
disp(['转向次数: ', num2str(turn_count)]);
disp(['重复点数: ', num2str(repeat_count)]);
%% A* 算法寻找最近未覆盖节点
function [nearest_unvisited, path] = find_nearest_unvisited(start, visited, map, directions)
[rows, cols] = size(visited);
open_set = [];
closed_set = zeros(rows, cols);
% 初始化起点
g_score = inf(rows, cols);
f_score = inf(rows, cols);
g_score(start(1), start(2)) = 0;
f_score(start(1), start(2)) = heuristic(start, visited);
open_set = [start, g_score(start(1), start(2)), f_score(start(1), start(2))];
while ~isempty(open_set)
% 找到 f_score 最小的节点
[~, idx] = min(open_set(:, 3));
current = open_set(idx, 1:2);
open_set(idx, :) = [];
closed_set(current(1), current(2)) = 1;
% 如果找到未覆盖节点
if visited(current(1), current(2)) == 0
nearest_unvisited = current;
path = reconstruct_path(start, current, g_score, directions);
return;
end
% 检查邻居
for i = 1:size(directions, 1)
neighbor = current + directions(i, :);
% 检查边界和障碍物
if neighbor(1) >= 1 && neighbor(1) <= rows && ...
neighbor(2) >= 1 && neighbor(2) <= cols && ...
map(neighbor(1), neighbor(2)) == 0 && ...
closed_set(neighbor(1), neighbor(2)) == 0
tentative_g_score = g_score(current(1), current(2)) + 1;
if tentative_g_score < g_score(neighbor(1), neighbor(2))
g_score(neighbor(1), neighbor(2)) = tentative_g_score;
f_score(neighbor(1), neighbor(2)) = tentative_g_score + heuristic(neighbor, visited);
% 添加到 open_set
open_set = [open_set; [neighbor, g_score(neighbor(1), neighbor(2)), f_score(neighbor(1), neighbor(2))]];
end
end
end
end
% 无解
nearest_unvisited = [];
path = [];
end
%% 启发式函数
function h = heuristic(pos, visited)
[rows, cols] = size(visited);
h = inf;
for i = 1:rows
for j = 1:cols
if visited(i, j) == 0
h = min(h, abs(pos(1) - i) + abs(pos(2) - j));
end
end
end
end
%% 路径重建
function path = reconstruct_path(start, goal, g_score, directions)
path = goal;
current = goal;
while ~(current(1) == start(1) && current(2) == start(2))
min_g = inf;
next_pos = [];
for i = 1:size(directions, 1)
neighbor = current + directions(i, :);
if neighbor(1) >= 1 && neighbor(1) <= size(g_score, 1) && ...
neighbor(2) >= 1 && neighbor(2) <= size(g_score, 2) && ...
g_score(neighbor(1), neighbor(2)) < min_g
min_g = g_score(neighbor(1), neighbor(2));
next_pos = neighbor;
end
end
path = [next_pos; path];
current = next_pos;
end
end
说明
- 地图初始化:创建了一个二维栅格地图,设置了障碍物。
- 运动规则:定义了四邻域运动方向(右、下、左、上)。
- A 星算法:当遇到死区时,使用 A 星算法寻找最近的未覆盖节点。
- 结果输出:绘制了覆盖路径,并统计了路径长度、转向次数和重复点数。
运行此代码后,您将看到覆盖路径的可视化结果以及相关的统计信息。
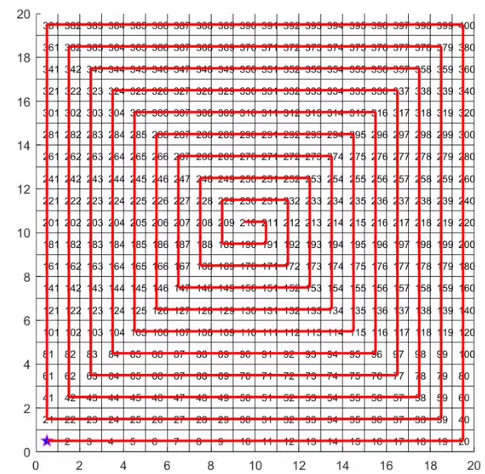
这是一个内螺旋式的全覆盖路径规划算法的示例。下面是一个基于 MATLAB 的实现代码,该代码将生成一个内螺旋式的全覆盖路径,并在遇到死区时使用 A* 算法进行路径规划。
内螺旋式全覆盖路径规划算法
function [path, path_length, turn_count, repeat_count] = spiral_coverage(rows, cols, obstacles)
% 初始化参数
map = zeros(rows, cols); % 创建二维栅格地图
start = [1, 1]; % 起始点
visited = zeros(rows, cols); % 访问标记
visited(start(1), start(2)) = 1;
% 设置障碍物
for i = 1:size(obstacles, 1)
map(obstacles(i, 1), obstacles(i, 2)) = 1;
end
% 定义运动方向(四邻域)
directions = [0, 1; 1, 0; 0, -1; -1, 0]; % 右、下、左、上
direction_names = {'右', '下', '左', '上'};
% 初始化变量
current_pos = start;
path = current_pos; % 记录路径
turn_count = 0; % 转向次数
repeat_count = 0; % 重复访问次数
direction_index = 1; % 初始方向为右
step_count = 1; % 当前方向上的步数计数器
%% 内螺旋式路径规划主循环
while true
% 检查是否完成全图覆盖
if sum(visited(:)) == rows * cols - size(obstacles, 1)
break;
end
% 按当前方向前进
moved = false;
next_pos = current_pos + directions(direction_index, :);
% 检查边界和障碍物
if next_pos(1) >= 1 && next_pos(1) <= rows && ...
next_pos(2) >= 1 && next_pos(2) <= cols && ...
map(next_pos(1), next_pos(2)) == 0
% 检查是否已经访问过
if visited(next_pos(1), next_pos(2)) == 0
current_pos = next_pos;
path = [path; current_pos];
visited(current_pos(1), current_pos(2)) = 1;
moved = true;
step_count = step_count + 1;
else
repeat_count = repeat_count + 1;
end
end
% 如果无法前进,尝试改变方向
if ~moved
direction_index = mod(direction_index + 1, 4) + 1;
turn_count = turn_count + 1;
step_count = 1;
end
end
%% 绘制结果
figure;
hold on;
% 绘制地图
imagesc(visited);
colormap([1 1 1; 0 0 0; 0 1 0]); % 白色:空地,黑色:障碍物,绿色:路径
axis equal;
axis tight;
% 绘制路径
for i = 1:size(path, 1) - 1
plot([path(i, 2), path(i+1, 2)], [path(i, 1), path(i+1, 1)], 'r-', 'LineWidth', 2);
end
title('内螺旋式全覆盖路径规划');
xlabel('X');
ylabel('Y');
% 输出统计信息
disp(['路径长度: ', num2str(size(path, 1))]);
disp(['转向次数: ', num2str(turn_count)]);
disp(['重复点数: ', num2str(repeat_count)]);
end
% 示例调用
rows = 20;
cols = 20;
obstacles = [5, 5; 6, 6; 7, 7; 8, 8]; % 障碍物位置
[path, path_length, turn_count, repeat_count] = spiral_coverage(rows, cols, obstacles);
说明
- 地图初始化:创建了一个二维栅格地图,并设置了障碍物。
- 运动规则:定义了四邻域运动方向(右、下、左、上)。
- 内螺旋式路径规划:按照内螺旋的方式遍历地图,遇到障碍物或已访问过的节点时改变方向。
- 结果输出:绘制了覆盖路径,并统计了路径长度、转向次数和重复点数。
运行此代码后,您将看到内螺旋式全覆盖路径的可视化结果以及相关的统计信息。
这是一个往返式全覆盖路径规划算法的示例。下面是一个基于 MATLAB 的实现代码,该代码将生成一个往返式的全覆盖路径,并在遇到死区时使用 A* 算法进行路径规划。
往返式全覆盖路径规划算法
function [path, path_length, turn_count, repeat_count] = back_and_forth_coverage(rows, cols, obstacles)
% 初始化参数
map = zeros(rows, cols); % 创建二维栅格地图
start = [1, 1]; % 起始点
visited = zeros(rows, cols); % 访问标记
visited(start(1), start(2)) = 1;
% 设置障碍物
for i = 1:size(obstacles, 1)
map(obstacles(i, 1), obstacles(i, 2)) = 1;
end
% 定义运动方向(四邻域)
directions = [0, 1; 1, 0; 0, -1; -1, 0]; % 右、下、左、上
direction_names = {'右', '下', '左', '上'};
% 初始化变量
current_pos = start;
path = current_pos; % 记录路径
turn_count = 0; % 转向次数
repeat_count = 0; % 重复访问次数
direction_index = 1; % 初始方向为右
step_count = 1; % 当前方向上的步数计数器
row_direction = 1; % 行方向:1 向下,-1 向上
%% 往返式路径规划主循环
while true
% 检查是否完成全图覆盖
if sum(visited(:)) == rows * cols - size(obstacles, 1)
break;
end
% 按当前方向前进
moved = false;
next_pos = current_pos + directions(direction_index, :);
% 检查边界和障碍物
if next_pos(1) >= 1 && next_pos(1) <= rows && ...
next_pos(2) >= 1 && next_pos(2) <= cols && ...
map(next_pos(1), next_pos(2)) == 0
% 检查是否已经访问过
if visited(next_pos(1), next_pos(2)) == 0
current_pos = next_pos;
path = [path; current_pos];
visited(current_pos(1), current_pos(2)) = 1;
moved = true;
step_count = step_count + 1;
else
repeat_count = repeat_count + 1;
end
end
% 如果无法前进,尝试改变方向
if ~moved
direction_index = mod(direction_index + 1, 4) + 1;
turn_count = turn_count + 1;
step_count = 1;
% 改变行方向
if direction_index == 2 || direction_index == 4
row_direction = -row_direction;
end
end
end
%% 绘制结果
figure;
hold on;
% 绘制地图
imagesc(visited);
colormap([1 1 1; 0 0 0; 0 1 0]); % 白色:空地,黑色:障碍物,绿色:路径
axis equal;
axis tight;
% 绘制路径
for i = 1:size(path, 1) - 1
plot([path(i, 2), path(i+1, 2)], [path(i, 1), path(i+1, 1)], 'r-', 'LineWidth', 2);
end
title('往返式全覆盖路径规划');
xlabel('X');
ylabel('Y');
% 输出统计信息
disp(['路径长度: ', num2str(size(path, 1))]);
disp(['转向次数: ', num2str(turn_count)]);
disp(['重复点数: ', num2str(repeat_count)]);
end
% 示例调用
rows = 20;
cols = 20;
obstacles = [3, 5; 4, 6; 7, 8; 8, 9; 10, 10; 11, 11; 12, 12; 13, 13; 14, 14; 15, 15; 16, 16; 17, 17; 18, 18; 19, 19]; % 障碍物位置
[path, path_length, turn_count, repeat_count] = back_and_forth_coverage(rows, cols, obstacles);
说明
- 地图初始化:创建了一个二维栅格地图,并设置了障碍物。
- 运动规则:定义了四邻域运动方向(右、下、左、上)。
- 往返式路径规划:按照往返的方式遍历地图,遇到障碍物或已访问过的节点时改变方向。
- 结果输出:绘制了覆盖路径,并统计了路径长度、转向次数和重复点数。
运行此代码后,您将看到往返式全覆盖路径的可视化结果以及相关的统计信息。

















 553
553

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









